多旋翼无人机辅助降落起落架
文献发布时间:2023-06-19 09:57:26
技术领域
本发明属于无人机技术领域,具体涉及多旋翼无人机辅助降落起落架。
背景技术
现有技术中,一般无人机起落架采用碳纤维管料作为支撑,为了减轻重量与风阻通常采用直径较细的管料。例如大疆M600即采用的是碳纤维管支撑结构,这种结构强度较弱,与地面接触面积较小,在增加吊舱等负载时候容易使机身重心不稳造成炸机等飞行事故。
单根碳纤维管的支撑方式长度为固定值,因此会对停机平台要求较高,主要是在平整度较好的场地进行起降。如果无人机处于野外越野场地时则无法安全执行飞行任务,场地倾斜会促使多旋翼旋转桨叶不在同一个平面,从而导致炸机。
普通无人机大多采用轻质空心碳纤维管材料来制作起落架,飞机的主要重心位于整个机身的上部,此时起落架与地面接触部分重量较轻,容易造成机身不稳,在动态起降过程中,因停桨后的自由落体导致与定点位置偏移量较大。
发明内容
本发明的目的是解决风力因素使得无人机起降容易发生侧翻,复杂环境中无人机对降落平台平整度的要求高,无人机对多种工况的适用性较弱的技术问题。
为解决上述技术问题本发明提供一种多旋翼无人机辅助降落起落架,解决复杂环境下提高动态起降成功率,具体的技术方案如下:
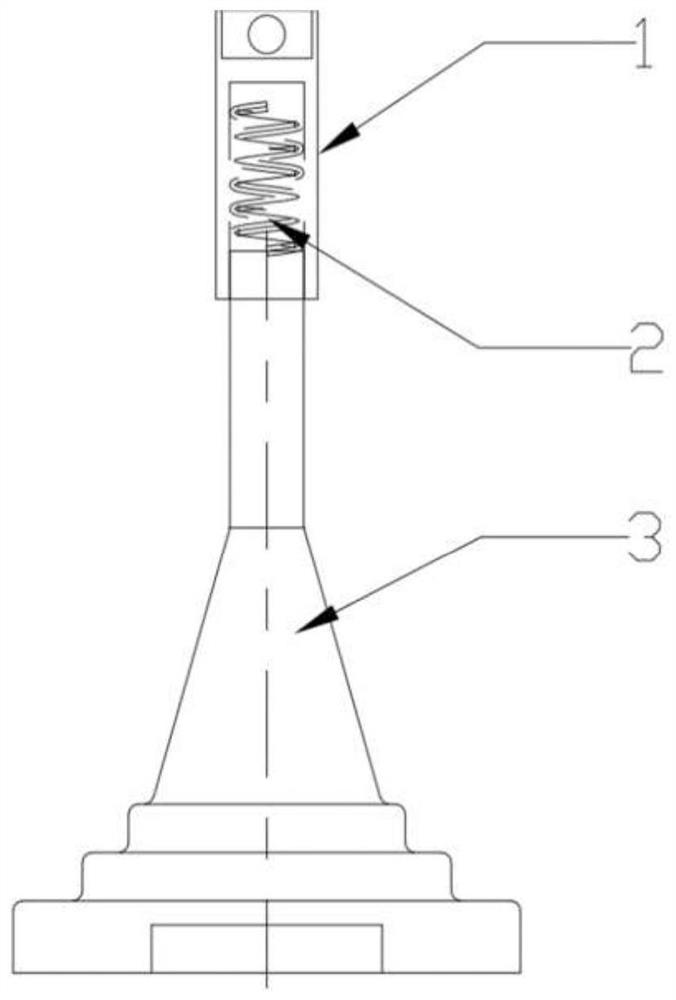
多旋翼无人机辅助降落起落架,包括机架连接筒1,柔性弹簧2,起落架缓冲腿3;
机架连接筒1用于起落架与机身的连接,包括包括连接孔11,机架连接筒腔体12,机架连接筒外壁13,连接孔11用于跟机身基座的螺纹固定连接;机架连接筒腔体12内放置柔性弹簧2;
起落架缓冲腿3包括缓冲腿连接筒31、缓冲腿中间件32、缓冲腿底座33、柱形腔体34、小号柔性弹簧35、凹槽36;
缓冲腿连接筒31为细长圆柱形,其与机架连接腔体12进行配合连接,构成伸缩杆装置,用以保证无人机机身水平;缓冲腿中间件32为圆锥形设计,平滑增大截面面积,用于减少截面突变带来的应力集中现象;缓冲腿底座33为阶梯圆盘结构,每层阶梯层上挖有若干的柱形腔体34,将小号柔性弹簧35置入其中,用于车载无人机动平台位置非水平有轻微角度时进行矫正,保证机身水平;缓冲腿底座最底层即阶梯圆盘最底层处设置有凹槽36,用于加装金属配重块和电磁铁。
进一步的,机架连接筒1采用7075航空铝材制作,以保证强度时减轻重量。
进一步的,缓冲腿连接筒31的长度可以根据机身实际加装负载的需求设计,在满足负载安装高度需求的同时减少31的长度从而降低无人机重心提高降落稳定性和降落时反向风力对无人机的影响。
进一步的,缓冲腿中间件32,其锥角设计小于30度会有较好的效果。进一步的,缓冲腿底座33的阶梯圆盘结构可根据所选的柔性弹簧大小来设计,最少应为三层。
进一步的,凹槽36可以为圆柱型槽、正方形槽或长方形槽。
进一步的,在缓冲腿底座33的最底层上贴上纹理纸用以增大无人机与停机坪的摩擦力,用于增加无人机的平稳性。
进一步的,多旋翼无人机辅助降落起落架,采用abs材质中间用网格填充从而在保证强度的同时降低重量。
相对于现有技术,本发明的有效收益如下:
1、本发明通过采用阶梯轴的机构设计,增大无人机起落架与地面的接触面积,从而降低了对平台平整度的要求,减少了风力因素对无人机起降动作时的影响;
2、本发明通过采用伸缩杆弹簧结构设计,对于有轻微高度差的野外停机环境可以进行高度补偿,提高了无人机对复杂环境的适应性;
3、本发明通过采用中空结构设计,减少了无人机负载重量,根据特殊工况可以在起落架地脚处增加电磁铁和负重块,减少停桨后的自由落体时间,提高动平台起降的降落精度;
4、本发明通过对起落机架的设计应用,大大降低了炸机的风险。对于动态起降而言提高了试验的安全性,为控制代码测试降低了成本。
附图说明
图1为本发明多旋翼无人机辅助降落起落架总体结构截面示意图;
图2为本发明多旋翼无人机辅助降落起落架机架连接筒截面示意图;
图3为本发明多旋翼无人机辅助降落起落架柔性弹簧截面示意图;
图4为本发明多旋翼无人机辅助降落起落架缓冲腿截面示意图。
其中:1-机架连接筒、2-柔性弹簧,3-起落架缓冲腿、11-连接孔、12-机架连接筒腔体、13-机架连接筒的外壁、31-缓冲腿连接筒、32-缓冲腿中间件、33-缓冲腿底座、34-柱形腔体、35-小号柔性弹簧、36-凹槽
具体实施方式
下面结合附图和实施例对本发明进行详细的描述。
本设计从上述两方面下手,设计一款重心较低从机身向下截面面积逐渐变大的起落架。增大落地时接触面积的同时增加强度,除此之外针对动态起降这种特殊工况机脚处可以增加配重电磁铁等辅助负载缩短停桨后自由落体的时间从而降低炸机的概率提高安全性。本发明采用3d打印技术进行样件试制,采用abs材质中间用网格填充从而在保证强度的同时降低重量。阶梯轴的结构设计减少了轴颈突变的应力集中,增加了整个零件的力学性能。
增加的弹性伸缩装置补偿野外停机环境的轻微高度差,降低野外起降作业的难度同时可以起到减震作用,减少用着陆对无人机机身带来的撞击伤害。设计凹槽可根据实际工况加装配重块和电磁铁,对于动态停机平台在进行定点降落时加快降落速度减少自由落体距离产生的定点偏差。
图1为起落架结构总体设计截面图,主要由三大部分组成分别为机架连接筒1,柔性弹簧2,起落架缓冲腿3构成。
图2为机架连接筒界面图,该部分主要起到起落架与机身的连接作用。连接孔11用于跟机身基座的螺纹固定连接;将柔性弹簧2置入机架连接筒腔体12内相互配合安装后再与起落架缓冲腿3配合安装,这样构成的伸缩杆装置当无人机四个支脚有加大的高度差时依然保证机身的水平。13为机架连接筒的外壁。机架连接筒用7075航空铝材制作,在保证强度时尽可能减轻重量。
图3为柔性弹簧2界面图,其与机架连接筒1配合安装,实现缓冲补高功能,使无人机适用复杂环境,降低对停机平台平整度的要求,在无人机四个落地机脚存在高度差时保证机身水平。
图4为起落架缓冲腿33截面图,缓冲腿连接筒31与与机架连接腔体12进行配合连接。缓冲腿连接筒31采用较细的圆柱形状减小截面面积便于缩小图1机架连接筒的体积减轻整机负载重量。31的长度可以根据机身实际加装负载的需求设计,在满足负载安装高度需求的同时尽可能减少缓冲腿连接筒31的长度从而降低无人机重心提高降落稳定性和降落时反向风力对飞机的影响。缓冲腿中间件32为圆锥形设计,用于平滑增大截面面积,减少截面突变带来的应力集中现象,设计锥角应小于30度不易过大。
缓冲腿底座33,为阶梯圆盘结构,每个盘上挖有若干柱形腔体34,可将小号柔性弹簧35置入其中。从而在车载无人机动平台位置非水平有轻微角度时进行矫正,保证机身水平,具体原理与安装方式可参照12与31的配合与安装。阶梯圆盘结构可根据所选柔性弹簧大小来设计,最少设计三层,有条件也可更多,以便获得更好的效果。
缓冲腿底座最底层上设置有凹槽36,即阶梯圆盘最底层处挖有圆柱型槽,其也可设计为正方形,长方形等其他形状凹槽,同样可以实现本发明,在凹槽内加装金属配重块和电磁铁。目前动平台起降实验中,炸机的主要问题在于无人机无法精准落在停机平台上。在无人机停桨之后无人机所作为自由落体运动,从硬件角度缩短这段降落时间可以有效提高动平台起降的成功率。在此凹槽处加装金属块或者电磁铁等可以有效缩短这段自由落体的时间,此外电磁铁可以吸附在停机平台上,可以避免在平台移动时无人机颠掉的风险。在缓冲腿底座即阶梯圆盘最地面贴上纹理纸来增大无人机与停机坪的摩擦力,增加无人机的平稳性。
- 多旋翼无人机辅助降落起落架
- 冰刀式无起落架大展弦比太阳能无人机降落辅助装置