一种无人机RTK及PPK系统定位修正补偿方法及装置
文献发布时间:2023-06-19 10:10:17
技术领域
本发明涉及定位技术领域,特别是一种无人机RTK及PPK系统定位修正补偿方法及装置。
背景技术
RTK(Real Time Kinematic)实时动态定位技术,是一项以载波相位观测为基础的实时差分GPS测量技术, PPK(post processed kinematic)技术,即动态后处理技术,是利用载波相位进行事后差分的GPS定位技术,RTK/PPK定位技术较传统GPS定位精度得以大幅度提高,可获取厘米级的定位精度。
RTK/PPK定位技术用于无人机航拍,可大幅度提高照片的POS数据精度,由于RTK/PPK定位点为天线的相位中心,现有的RTK/PPK系统的天线在无人机上采用固定安装结构,RTK/PPK天线与相机镜头有一段距离,无人机在航拍时机身姿态不断发生变化,导致RTK/PPK天线相位中心的投影位置与相机镜头光学中心的距离不断变化,使得航拍照片的POS数据产生偏差。
目前,解决以上无人机机身倾斜偏差的方法有两种,一种是在无人机上安装两个以上的RTK/PPK系统,进行偏移计算修正,该技术大大增加了无人机的载重,电子设备较复杂;二是增加无人机机身姿态记录系统,实时记录机身的姿态信息,在线下通过软件解算进行纠偏,该方法需要机身增加姿态记录系统,并需要进行复杂计算过程,以上两种方法的软件和硬件成本都较高。
发明内容
为解决上述背景技术中的问题,本发明提供一种无人机RTK及PPK系统定位修正补偿方法及装置。
本发明解决其技术问题所采用的技术方案是:一种无人机RTK及PPK系统定位修正补偿方法,将RTK/PPK天线安装在设有俯仰轴伺服电机和横滚轴伺服电机的平台上,由俯仰轴伺服电机和横滚轴伺服电机对无人机在航拍过程中的俯仰角和横滚角进行修正补偿,修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移,使RTK/PPK天线相位中心保持于相机镜头光学中心正上方,以获取航拍照片的高精度POS信息采集。
进一步,所述无人机RTK/PPK定位修正补偿方法具体步骤如下:
将无人机RTK/PPK天线安装在设有俯仰轴伺服电机和横滚轴伺服电机的平台上,所述RTK/PPK天线相位中心设于航拍的相机镜头光学中心的正上方;
无人机在航拍过程中,所述俯仰轴伺服电机和横滚轴伺服电机根据无人机俯仰角和横滚角姿态信息,不断进行实时俯仰角和横滚角修正补偿,修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移,使RTK/PPK天线相位中心保持于相机镜头光学中心正上方;
所述无人机的俯仰角和横滚角姿态信息通过无人机飞行控制系统或机身姿态传感器采集。
进一步,所述无人机的俯仰角和横滚角姿态信息通过无人机飞行控制系统采集用于云台俯仰轴和横滚轴增稳控制的PWM信号,传输至所述俯仰轴伺服电机和横滚轴伺服电机用于俯仰角和横滚角修正补偿,修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移。
通过现有大部分无人机自身的飞行控制系统可获取用于云台俯仰轴和横滚轴增稳控制的PWM信号,该PWM信号可用于所述俯仰轴伺服电机和横滚轴伺服电机用于所述RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移修正补偿。不需要再增加系统装置,也无需再进行线下的软件复杂解算过程,大大简化系统构成。
进一步,所述无人机的俯仰角和横滚角姿态信息通过无人机机身姿态传感器测量取得姿态信息,转换为PWM信号传输至所述俯仰轴伺服电机和横滚轴伺服电机用于俯仰角和横滚角修正补偿,修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移。
当通过无人机自身的飞行控制系统不能采集到俯仰角和横滚角姿态的PWM信号时,则通过机身姿态传感器进行采集,再将其转换为的PWM信号,俯仰轴伺服电机和横滚轴伺服电机用于俯仰角和横滚角修正补偿,使RTK/PPK天线相位中心保持于相机镜头光学中心正上方,以获取航拍照片的高精度POS信息采集。
进一步,本发明还提供一种无人机RTK及PPK系统定位修正补偿装置,包括用于安装RTK/PPK天线的天线安装平台,还包括,与无人机飞行控制系统相连接的补偿伺服系统,所述补偿伺服系统包括有用于对无人机在航拍过程中的俯仰角和横滚角进行修正补偿的俯仰轴伺服电机和横滚轴伺服电机,所述天线安装平台安装在补偿伺服系统上。
所述补偿伺服系统通过无人机飞行控制系统采集用于云台俯仰轴和横滚轴增稳控制的PWM信号,传输至所述俯仰轴伺服电机和横滚轴伺服电机用于俯仰角和横滚角修正补偿。修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移,使RTK/PPK天线相位中心保持于相机镜头光学中心正上方;以获取航拍照片的高精度POS信息采集。
进一步,所述补偿伺服系统还连接有姿态补偿控制系统,所述姿态补偿控制系统用于实时采集无人机的俯仰角和横滚角姿态信息,并将俯仰角和横滚角补偿指令发送至补偿伺服系统。当通过无人机自身的飞行控制系统不能采集到俯仰角和横滚角姿态的PWM信号时,则通过姿态补偿控制系统进行采集,再将俯仰角和横滚角补偿指令发送至补偿伺服系统,俯仰轴伺服电机和横滚轴伺服电机,修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移。
进一步,所述姿态补偿控制系统包括有IMU传感器和与之连接的运算单元模块;所述IMU传感器用于测量无人机的俯仰角和横滚角姿态信息,所述运算单元模块用于将IMU传感器测量的姿态信息转换为用于控制补偿伺服系统的PWM信号。当无人机自身的飞行控制系统不能采集到俯仰角和横滚角姿态的PWM信号时,则通过IMU传感器测量获取,所述运算单元模块再将其转换为的PWM信号,传输至所述俯仰轴伺服电机11和横滚轴伺服电机12用于修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移。
实施过程:将无人机RTK/PPK天线安装在设有俯仰轴伺服电机和横滚轴伺服电机的平台上,RTK/PPK天线相位中心设于航拍的相机镜头光学中心的正上方。
无人机在航拍过程中,俯仰轴伺服电机和横滚轴伺服电机根据无人机俯仰角和横滚角姿态信息,不断进行实时的俯仰角和横滚角修正补偿,修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移,使RTK/PPK天线相位中心保持于相机镜头光学中心正上方。
在飞行航拍过程中,无人机的俯仰角和横滚角姿态信息可通过无人机飞行控制系统采集,也可通过无人机机身姿态传感器进行采集获得。
在无人机航拍过程中,RTK/PPK天线相位中心保持于相机镜头光学中心正上方,两者之间始终保持在垂直方向固定距离,该垂直方向的固定距离可通过天线位置补偿进行设置后修正,即可实现获取航拍照片的高精度POS信息采集。
其中,无人机的俯仰角和横滚角姿态信息,通过无人机飞行控制系统采集用于云台俯仰轴和横滚轴增稳控制的PWM信号,传输至所述俯仰轴伺服电机和横滚轴伺服电机用于俯仰角和横滚角修正补偿,修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移,使RTK/PPK天线相位中心保持于相机镜头光学中心正上方。本发明方法不需要再增加系统装置,也无需再进行线下的软件复杂解算过程,大大简化系统构成。
当通过无人机飞行控制系统不能采集到俯仰轴和横滚轴控制的PWM信号时,则通过无人机机身姿态传感器测量取得姿态信息,将其转换为的PWM信号后,传输至所述俯仰轴伺服电机和横滚轴伺服电机用于俯仰角和横滚角修正补偿,修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移,使RTK/PPK天线相位中心保持于相机镜头光学中心正上方,以获取航拍照片的高精度POS信息采集。
本发明的有益效果是:将RTK/PPK天线由俯仰轴伺服电机和横滚轴伺服电机对无人机在航拍过程中的俯仰角和横滚角进行修正补偿,修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心的偏移,即在无人机航拍过程的姿态变化时进行实时修正补偿,实现RTK/PPK天线相位中心保持于相机镜头光学中心正上方;获取航拍照片的高精度POS信息采集。采用本发明可实现RTK/PPK天线相位中心投影与相机镜头光学中心之间的偏差就地实时补偿修正,只需设置一套RTK/PPK系统即可获得航拍高精度POS信息采集,无需在无人机上安装两个以上的RTK/PPK装置进行定位偏移修正,也无需通过增加无人机机身姿态记录系统,在线下通过软件的复杂解算进行纠偏。
本发明通过无人机自身的飞行控制系统即可获取俯仰角和横滚角姿态信息,用于控制俯仰轴伺服电机和横滚轴伺服电机,对RTK/PPK天线相位中心投影与相机镜头光学中心之间的偏差就地实时动态补偿修正,大大简化了修正过程,也无需进行线下的软件复杂解算过程。
本发明装置的补偿伺服系统包括有俯仰轴伺服电机和横滚轴伺服电机,可连接无人机自身的飞行控制系统使用,或可增加姿态补偿控制系统测量取得无人机的姿态信息进行动态补偿修正,配置简单、使用灵活,可适配于大多数类型的现有商用无人机进行航拍作业。
本发明可大大简化无人机航拍系统构成和软件解算过程,降低了无人机航拍系统挂载重量和系统成本,同时可获取航拍照片的高精度POS信息采集。
附图说明
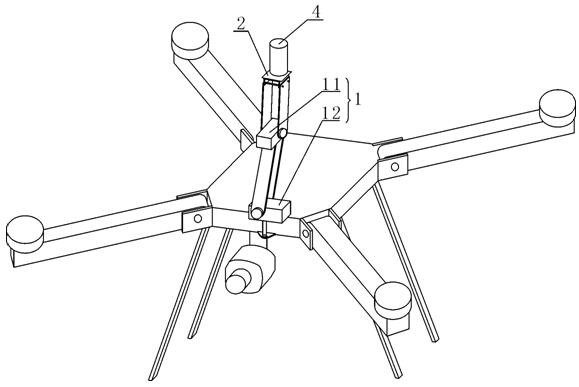
图1是本发明的装置的结构示意图;
图2是本发明的实施例2示意图;
图3是本发明的姿态补偿控制系统示意框图。
图中零部件及编号:
1-补偿伺服系统;2-天线安装平台;3-姿态补偿控制系统;4-RTK/PPK天线;11-俯仰轴伺服电机;12-横滚轴伺服电机;31-IMU传感器;32-运算单元模块。
具体实施方式
下面结合附图和实施例对本发明进一步说明。
一种无人机RTK及PPK系统定位修正补偿方法,将RTK/PPK天线安装在设有俯仰轴伺服电机和横滚轴伺服电机的平台上,由俯仰轴伺服电机和横滚轴伺服电机对无人机在航拍过程中的俯仰角和横滚角进行修正补偿,修正补偿RTK/PPK天线相位中心的投影与相机镜头光学中心之间的偏移,使RTK/PPK天线相位中心保持于相机镜头光学中心正上方,以获取航拍照片的高精度POS信息采集。
实施例1
如图1所示,一种无人机RTK及PPK系统定位修正补偿装置,包括用于安装RTK/PPK天线4的天线安装平台2,还包括,与无人机飞行控制系统相连接的补偿伺服系统1,所述补偿伺服系统1包括有用于对无人机在航拍过程中的俯仰角和横滚角进行修正补偿的俯仰轴伺服电机11和横滚轴伺服电机12,所述天线安装平台2安装在补偿伺服系统1上。
实施过程
将RTK/PPK天线4安装在补偿伺服系统1的天线安装平台2上,所述RTK/PPK天线4相位中心设于航拍的相机镜头光学中心的正上方。
在飞行航拍过程中,补偿伺服系统1采集无人机飞行控制系统的用于云台俯仰轴和横滚轴增稳控制的PWM信号,传输至俯仰轴伺服电机11和横滚轴伺服电机12实时对俯仰角和横滚角修正补偿,修正补偿RTK/PPK天线4相位中心的投影与相机镜头光学中心之间的偏移,使RTK/PPK天线4相位中心保持于相机镜头光学中心正上方,实现航拍过程获取航拍照片的高精度POS信息采集。
在无人机航拍过程中,RTK/PPK天线4相位中心保持于相机镜头光学中心正上方,两者之间始终保持在垂直方向的固定距离,该垂直方向的固定距离可通过系统的RTK设置软件或PPK解算软件的天线位置补偿进行设定后实现修正,实现航拍过程获取航拍照片的高精度POS信息采集。
实施例2
如图2、3所示,一种无人机RTK及PPK系统定位修正补偿装置,包括用于安装RTK/PPK天线4的天线安装平台2,还包括,与无人机飞行控制系统相连接的补偿伺服系统1,所述补偿伺服系统1包括有用于对无人机在航拍过程中的俯仰角和横滚角进行修正补偿的俯仰轴伺服电机11和横滚轴伺服电机12,所述天线安装平台2安装在补偿伺服系统1上。
所述补偿伺服系统1还连接有姿态补偿控制系统3,所述姿态补偿控制系统3用于实时采集无人机的俯仰角和横滚角姿态信息,并将俯仰角和横滚角补偿指令发送至补偿伺服系统1。
如图3所示,所述姿态补偿控制系统3包括有IMU传感器31和与之连接的运算单元模块32;所述IMU传感器31用于测量无人机的俯仰角和横滚角姿态信息,所述运算单元模块32用于将IMU传感器31测量的姿态信息转换为用于控制补偿伺服系统1的PWM信号。
实施过程
将RTK/PPK天线4安装在补偿伺服系统1的天线安装平台2上,RTK/PPK天线4相位中心设于航拍相机镜头光学中心的正上方;
在飞行航拍过程中,姿态补偿控制系统3通过IMU传感器31测量取得无人机的姿态信息,运算单元模块32将IMU传感器31测量的姿态信息转换为用于控制补偿伺服系统1的PWM信号,传输至补偿伺服系统1的俯仰轴伺服电机11和横滚轴伺服电机12,俯仰轴伺服电机11和横滚轴伺服电机12对俯仰角和横滚角修正补偿,修正补偿RTK/PPK天线4相位中心的投影与相机镜头光学中心之间的偏移,使RTK/PPK天线4相位中心保持于相机镜头光学中心正上方,实现航拍过程获取航拍照片的高精度POS信息采集。
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
- 一种无人机RTK及PPK系统定位修正补偿方法及装置
- 一种无人机RTK及PPK系统定位修正补偿装置