一种基于多帧差分图像累积的小目标检测方法
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及光学成像技术领域,尤其涉及一种基于多帧差分图像累积的小目标检测方法。
背景技术
利用光学成像设备进行目标检测与跟踪,在无人机探测邻域具有重要的实用价值,但是受限于光学成像设备在目标分辨率与视场范围矛盾的限制,一般光学成像设备倾向于使用大视场成像设备首先对大范围区域进行成像,并对所获图像进行目标检测,当图像中存在潜在目标时,再驱动高分辨率小视场的成像系统对潜在目标区域进行重点观测。因此,从大视场范围成像的图像中检测出潜在目标,对于光学成像系统能否正常工作起着至关重要的作用。由于大视场图像中,目标分辨率一般较低,以小目标形式出现,因此需要使用特定的目标检测方法对图像进行分析处理,检测出目标潜在区域。
虽然,目前已有大量通过目标的运动显著性或灰度显著性的小目标检测方法,但这些方法一般都要求目标存在几何位移,或与背景具有相对明显的颜色和形态差异。
然而,当无人机等目标悬停在低空区域时,极有可能出现目标本身不具备运动特性,此时,传统的基于运动显著性的检测方法检测效果会受到很大影响。
当使用灰度显著性进行目标检测时,若目标和背景颜色相对接近,此时灰度显著性表征不明显,难以通过谱残余法或最大类间方差法等显著性检测方法实现目标检测。
发明内容
本发明为了解决上述技术问题提供一种基于多帧差分图像累积的小目标检测方法。
本发明通过下述技术方案实现:
一种基于多帧差分图像累积的小目标检测方法,包括以下步骤:
S1,获取待测场景无目标时的背景图像,作为标准背景图像进行保持;
S2,获取多帧待检测图像;
S3,将S2获得的每帧待检测图像与标准背景图像分别进行差分运算,获得差分图像;
S4,将S3得到的差分图像进行累加;
S5,根据差分累加结果判断是否出现待测目标;如果出现待测目标则输出并结束检测;
反之,则将所述S2得到的多帧待检测图像序列累加求平均,作为新的标准背景图像并返回S2。
进一步的,所述S1中,将获取的待测场景无目标时的背景图像进行降噪处理后,再作为标准背景图像进行保持。
进一步的,所述S2包括:
S2.1,利用光学成像设备对待测场景进行连续成像;
S2.2,将步骤2.1获得的多帧图像进行降噪处理,获得多帧待检测图像。
优选地,采用高斯滤波进行降噪处理。
进一步的,所述S5中,将差分累加后结果中的每个像素偏离0值的数值大小与设定的目标阈值进行比较;
若累加结果中某个像素取值偏离0值的数值超过设定的目标阈值,则认为该像素属于潜在目标区域,反之则认为该像素不属于潜在目标区域;
当图像的所有像素都不属于潜在目标区域时,则认为未出现待测目标;反之,则认为出现待测目标。
与现有技术相比,本发明具有以下有益效果:
1,本发明利用实时测量所得图像与背景图像进行差分运算,然后将差分结果进行累积,使用累积后的结果进行目标检测,能够有效避免随机噪声对差分计算的影响,由于一般随机噪声符合零均值等概率分布,多帧累积可以从统计上有效消除噪声影响,并强化目标与背景的差异,更准确地实现目标检测;
2,本发明在实时采集的图像数据中没有潜在目标时,使用实时采集所得的图像替换标准背景模板,可使得标准背景模板对环境适应性更强,当环境光照等条件发生缓变的情况下,标准背景模板能够不断根据实际情况进行调整,相比固定背景模板,具有更强的环境适应性。
附图说明
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。
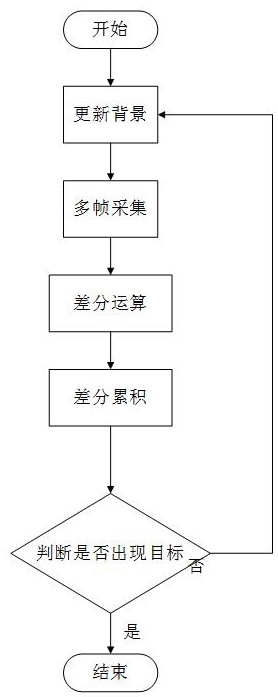
图1是本发明的流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
如图1所示,本发明公开的基于多帧差分图像累积的小目标检测方法,包括以下步骤:
S1,获取待测场景无目标时的背景图像并进行降噪处理,将降噪后的背景图像作为标准背景图像进行保持;
S2,利用光学成像设备对待测场景进行连续成像并进行降噪处理,获得多帧待检测图像;
S3,将S2获得的每帧待检测图像与标准背景图像分别进行差分运算,获得差分图像;
S4,将S3得到的差分图像进行累加;
S5,根据差分累加结果判断是否出现待测目标;如果出现待测目标则输出并结束检测;
反之,则将所述S2得到的多帧待检测图像序列累加求平均,作为新的标准背景图像并返回S2。
本发明能够有效提升光学成像观测设备在复杂背景情况下的小目标检测能力,特别是对于拓展光学成像设备在待测目标与背景颜色信息接近的场景中的应用具有重要实用价值。
基于上述基于多帧差分图像累积的小目标检测方法,本发明公开一实施例。
实施例1
本实施例基于目标与背景必然存在一定颜色差异,而不可能完全一致的假设。其步骤如下:
步骤1,利用光学成像设备获取待测场景无目标时的背景图像G并进行高斯滤波,将滤波后的背景图像作为标准背景图像GS进行保存,标准背景像GS采用公式(1)计算:
式(1)中,高斯滤波模板Mask一般选用3×3或者5×5大小。使用的高斯滤波模板大小应保持稳定,在进行目标检测过程中不应发生改变。
步骤2,利用光学成像设备对待测场景进行连续成像,将获得的每帧图像进行高斯滤波后得到图像序列I。
其中,在连续成像过程中,光学成像设备参数应保持稳定不变;图像帧数可依据实际应用场景进行调整,在满足系统实时性的情况下,应采集尽量多的图像帧数提高算法准确性。
步骤3,将每帧图像I
Sub
式(2)中,i表示图像标号;
步骤4,将差分后图像Sub
式(3)中,N表示图像序列的图像帧数。
步骤5,根据差分累加结果判断是否出现待测目标;具体包括:
将差分累加结果SubT中的每个像素偏离0值的数值大小与设定的目标阈值进行比较,
若累加结果中某个像素取值偏离0值的数值超过设定的目标阈值,则认为该像素属于潜在目标区域,反之则认为该像素不属于潜在目标区域;
当图像的所有像素都不属于潜在目标区域时,则认为未出现待测目标;反之,则认为出现待测目标。
步骤6,如果步骤5中判定出现待测目标,则提示系统检测到目标,检测流程结束;
如果步骤5中判定未出现待测目标,则将步骤3得到的图像序列I累加求平均,作为新的标准背景图像GS,并返回步骤2。
其中,目标阈值应根据实际场景和系统要求动态调整,灵活选取。
本发明通过连续采集多帧图像分别与背景进行差分,此时颜色差异信息会因差分被检测得出,再通过多帧差分图像累积,随机起伏噪声在多次累积后对累积结果统计贡献为0,而目标形成的差异会由于累加运算得到加强,进而实现了目标与背景的分离,且能够有效消除噪声影响,实现较为准确的小目标检测。本发明方法在目标悬停且与背景灰度接近的应用场景中,相比现有方法具有更高的检测灵敏度和准确性。本发明已通过原理性仿真验证,方法可行,易于工程实现,实用性强。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于多帧差分图像累积的小目标检测方法
- 一种基于连续有限帧红外图像的弱小目标检测方法