纳流控装置
文献发布时间:2023-06-19 10:35:20
技术领域
本发明属于原位实验器械技术领域,具体涉及一种纳流控装置。
背景技术
原位流体芯片做实验的时候,需要实时将流体(气体或者液体)导入到芯片中,才能观测到实时的物理或者化学的变化。由于流体芯片内部的空间需要非常薄,才能形成非常薄的流体层,电子透射电镜才能进行观察(太厚的流体层会阻碍电子束穿透),所以流体的流量需要非常小(达到纳升级别)。
实验过程往往需要切换多种流体材料。根据芯片使用情况,某些实验需要流体能够在芯片内部往返动作。目前,流体流量的控制、材料的切换以及流体在芯片内的往返动作都需要操作者进行繁琐的手动操作、切换等,非常不方便。
发明内容
为解决上述问题,本发明提供一种能自动控制流体流量、切换材料以及控制流体运动方向的纳流控装置。
具体地,本发明的技术方案是:
一种纳流控装置,包括外壳,外壳内设有流体控制组件和控制器,控制器的输出端接流体控制组件的控制输入端;流体控制组件具有一个流道切换阀门、一个注射器和多个内部流道接口,流道切换阀门用于切换与注射器连通的内部流道接口;外壳上设有多个外部流道接口,不同的内部流道接口分别接不同的外部流道接口。
优选地,所述流体控制组件还包括驱动机构,注射器包括流体容器和活塞推杆,活塞推杆和流道切换阀门的控制输入端与驱动机构的输出端连接,驱动机构接控制器的控制输出端。
优选地,所述驱动机构包括流道切换伺服电机、直线模组、行星减速器和直线模组伺服电机;流道切换伺服电机与流道切换阀门连接,用于驱动流道切换阀门进行流道切换;活塞推杆依次通过直线模组和行星减速器接直线模组伺服电机。
优选地,所述流体容器为圆柱形玻璃管。
优选地,所述外壳上设有触摸屏组件,触摸屏组件与控制器连接。
优选地,所述外部流道接口和内部流道接口的数量都为6个;6个外部流道接口中,1个用作废物排出口,其余5个分别用于连接实验用的流体或流体杆。
优选地,所述外壳的顶面外侧设有固定部,固定部用于连接悬臂梁。
优选地,所述外壳的底面外侧设有把手。
优选地,所述外部流道接口设在外壳的外侧面。
优选地,所述内部流道接口通过聚四氟乙烯管道连接外部流道接口。
采用上述方案后,有益效果是:
在流体控制组件的控制下,流体按控制器所提供控制信号指示的流量和速度经外部流道接口输出,到达流体杆,进入芯片中;不同的外部流道接口可以用于接收不同的流体材料,通过流体控制组件进行不同流体材料的切换;流体控制组件可以吸入和排出流体,使流体在芯片内往返运动。流体流量的控制、材料的切换以及流体在芯片内的往返动作都由流体控制组件在控制器的控制下自动完成,不需要操作者进行繁琐的手动操作,使用更便捷,效率更高,提升了用户体验。
附图说明
图1为本发明实施例一的立体结构图;
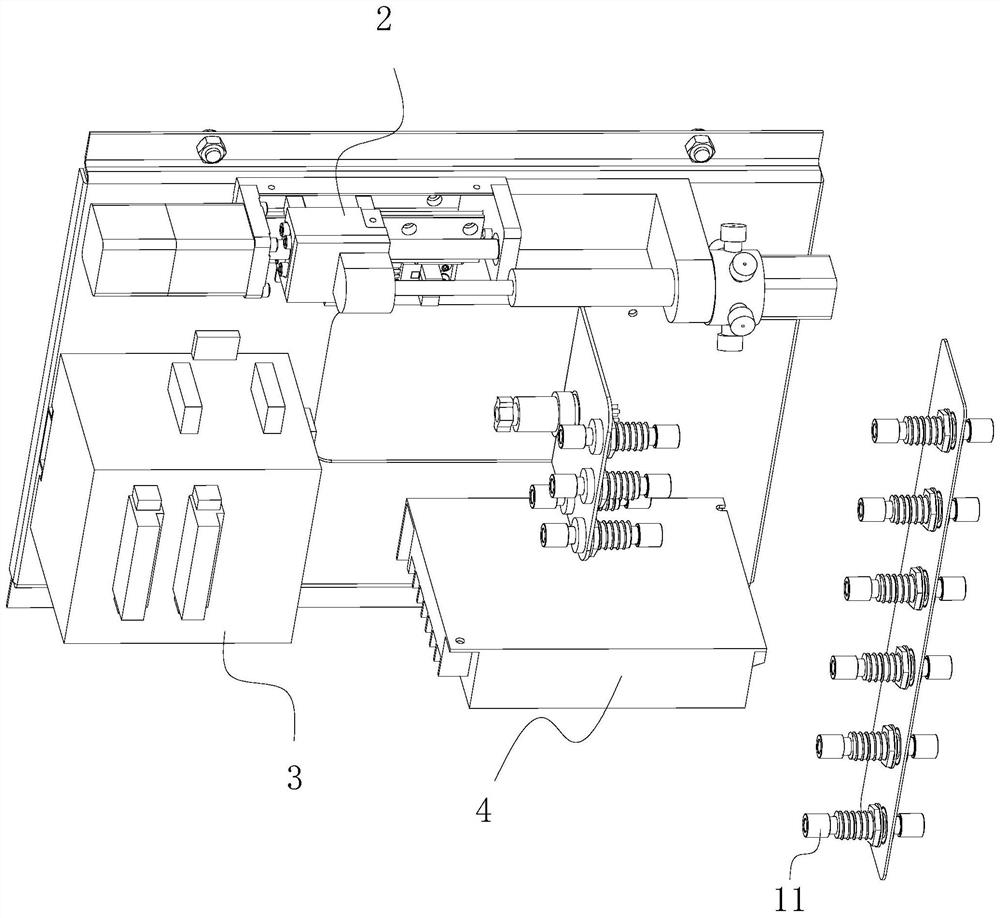
图2为本发明实施例一的分解结构图;
图3为本发明实施例一核心部分的结构图;
图4为本发明实施例一流体控制组件的结构图;
图5为本发明实施例一流体控制组件另一视角的结构图。
具体实施方式
下面结合附图及具体实施例对本发明作进一步详细说明。
实施例一:
如图1至5所示,一种纳流控装置,包括外壳1,外壳1内设有流体控制组件2和控制器3,控制器3的输出端接流体控制组件2的控制输入端。控制器3可以选用现有的PLC(Programmable Logic Controller,可编程逻辑控制器)。
流体控制组件2具有一个流道切换阀门23、一个注射器22和多个内部流道接口21。流道切换阀门23用于切换与注射器22连通的内部流道接口21:流道切换阀门23内部的旋转切换动作受控于控制器3提供的控制信号,使流体从特定内部流道接口21流入或流出。
外壳1上设有多个外部流道接口11,不同的内部流道接口21分别接不同的外部流道接口11。
进一步地,在本实施例中,外部流道接口11和内部流道接口21的数量都为6个。6个外部流道接口11中,1个外部流道接口11用作废物排出口,对外可连接废物容器,收集实验废物;其余5个外部流道接口11分别对外用于连接实验用流体(气体或液体)或流体杆(流体通过流体杆到达芯片内参与实验),以气体为例,根据实际需要可以将4个用于进气,1个用于排气,或3个进气2个排气,或2个进气3个排气,或1个进气4个排气。
外部流道接口11对内用于连接内部流道接口21,任一外部流道接口11可以与任一内部流道接口21连接。内部流道接口21可用于排出流体,也可用于吸入流体。在其它实施例中,外部流道接口11和内部流道接口21的数量可以与本实施例不同。
进一步地,流体控制组件2还包括驱动机构,注射器22包括流体容器221和活塞推杆222,活塞推杆222和流道切换阀门23的控制输入端与驱动机构的输出端连接,驱动机构接控制器3的控制输出端。在其它实施例中,所属技术领域的技术人员可以根据实验需要选用其它结构的注射器22。
驱动机构受控于控制器3,注射器22在驱动机构的作用下可以排出流体容器221中的流体,也可以将流体吸入流体容器221。控制器3可以通过驱动机构控制活塞推杆222的运动速度变快或变慢,使流体流量变大或变小。
进一步地,驱动机构包括流道切换伺服电机241、直线模组242、行星减速器243和直线模组伺服电机244;流道切换伺服电机241与流道切换阀门23连接,用于驱动流道切换阀门23进行流道切换;活塞推杆222依次通过直线模组242和行星减速器243接直线模组伺服电机244。
直线模组伺服电机244根据控制器3提供的控制信号控制直线模组242前后运动,推动活塞推杆222的活塞头在流体容器221内移动,可以产生正压排出流体,或者产生负压吸入流体。由于使用了伺服电机搭配行星减速器的执行机构,活塞推杆222可以随时开始或停止运动,运动速度可以很慢,运动精度可以很高,可以很好地控制流体的流量,搭配内径很小的流体容器221和直径很小的活塞头,流体控制精度可以达到纳升级。
进一步地,外壳1上设有触摸屏组件12,触摸屏组件12的输出端接控制器3。操作者通过触摸屏组件12向控制器3提供命令,使控制器3根据设置的步骤和参数控制流体控制组件2进行动作,以控制流体的流量和方向,以及使流体在管道中定时往返。
进一步地,内部流道接口21通过聚四氟乙烯管道(图未示)连接外部流道接口11。在其它实施例中,所属技术领域的技术人员可以根据实验需要选用其它材料的管道。
进一步地,流体容器221为圆柱形玻璃管。在其它实施例中,所属技术领域的技术人员可以根据实验需要选用其它材质和/或形状的流体容器221。
进一步地,外壳1的顶面设有固定部13,固定部13用于连接悬臂梁。在其它实施例中,也可以不设固定部13。
进一步地,外壳1的底面设有把手14,方便操作者向各方向移动纳流控装置。在其它实施例中,也可以不设把手14。
进一步地,外部流道接口11设在外壳1的外侧面,使用更方便,用于连接实验用流体(或流体杆)的管道更短。在其它实施例中,也可以直接用管道将内部流道接口21与实验用流体(或流体杆)连接,还可以在外壳1顶部设置外部流道接口11,用管道将外部流道接口11与实验用流体(或流体杆)连接,在外壳1顶面开设让位孔15,管道从让位孔15穿出。
外壳1内还设有开关电源4和风扇5,分别用于为所述纳流控装置供电和散热。
工作流程:
6个外部流道接口11中,1个接废物容器,1个接流体杆,4个分别接4种不同的实验用流体;6个外部流道接口11分别接6个内部流道接口21。操作者通过触摸屏组件12选择所需流体材料对应的外部流道接口11,设置流体流动方向和流量参数。
根据操作者设置的参数,控制器3向流体控制组件2发送控制信号,使流体控制组件2执行相应的动作:控制流道切换阀门23进行流道切换,使相应的内部流道接口21与注射器22对接;控制注射器22根据设置的流动方向排出注射器22容器内的流体或将流体吸入容器内。
进一步地,在开始实验之前,或完成实验之后,流体控制组件2将与废物容器连接的内部流道接口21与注射器22对接,控制注射器22排净注射器22容器内的流体。
以上所述仅为本发明的较佳实施例,并非对本发明的限制。应当指出,本领域的技术人员在阅读完本说明书后,凡在本发明的精神和原则之内所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 微纳流控芯片及其制造方法、微纳流控系统
- 一种利用振荡流的高集成度微纳颗粒汇聚微流控装置