一种生物肉类用的切丁装置
文献发布时间:2023-06-19 10:52:42
技术领域
本发明涉及一种切丁装置,尤其涉及一种生物肉类用的切丁装置。
背景技术
生物肉类内含有蛋白质与多种矿物质和维生素,在日常生活中可为人们提供极为大量的营养。
在对肉类进行烹饪前,需要对肉类进行切丁,使得肉类变为适合入口的大小,以便于后续的烹饪以及食用,在对肉类进行切丁时,需要先手动将肉类进行固定,随后使用刀具对肉类进行切割,在多次的切割后完成肉类的切丁工作,但这样对肉类进行切丁需要耗费较多的时间,效率较低。
因此,需要设计一种能较为方便的对肉类进行切丁工作,工作效率较高的生物肉类用的切丁装置。
发明内容
为了克服手动对肉类进行切丁工作时,需要耗费较多的时间,工作效率较低的缺点,本发明的技术问题是:提供一种能较为方便的对肉类进行切丁工作,工作效率较高的生物肉类用的切丁装置。
本发明的技术实施方案为:一种生物肉类用的切丁装置,包括有:支撑组件;下料组件,安装在支撑组件上;手动推料组件,滑动式安装在支撑组件上;手动切丁组件,安装在下料组件上;装料组件,安装在支撑组件上。
进一步的是,支撑组件包括有:支撑柱;第一支撑板,安装在支撑柱上,支撑柱一侧开有滑槽。
进一步的是,下料组件包括有:第一支撑杆,安装在支撑柱两侧;下料框,安装在第一支撑杆之间。
进一步的是,手动推料组件包括有:推料凹形板,滑动式安装在第一支撑板上;滑块,安装在推料凹形板两侧。
进一步的是,手动切丁组件包括有:第二连接板,对称安装在下料框上;第一连杆,滑动式安装在第二连接板之间;第一弹簧,安装在第一连杆与第二连接板之间;第一连接板,安装在第一连杆上;第一导轨,安装在第一连接板两侧;竖切刀具,安装在第一导轨之间;横切刀具,安装在竖切刀具上。
进一步的是,还包括有自动推料组件,自动推料组件包括有:第三滑轨,安装在第一支撑板两侧,滑块与相近的第三滑轨滑动式配合;第四弹簧,安装在滑块与相近的第三滑轨之间;第一齿条,安装在一侧的滑块上;第二支撑板,放置在支撑柱上;电机,安装在第二支撑板上;第四连杆,安装在电机的输出轴上;第一半齿轮,安装在第四连杆上,第一半齿轮与第一齿条啮合;第三支撑板,安装在第一支撑板上;第五连杆,滑动式安装在第三支撑板上;楔形块,安装在第五连杆上,楔形块与第一齿条配合;第五弹簧,安装在第五连杆与第三支撑板之间;异形杆,安装在第五连杆上。
进一步的是,还包括有装料组件,装料组件包括有:第三连接板,放置在支撑柱另一侧;第二连杆,转动式安装在第三连接板之间;装肉丁框,安装在第二连杆上;第一扭力弹簧,安装在第二连杆与一侧的第三连接板之间;第四连接板,安装在一侧的第三滑轨上;转动板,转动式安装在第四连接板上;第二扭力弹簧,安装在转动板与第四连接板之间;滑动板,滑动式安装在滑槽内,滑动板与异形杆连接,滑动板与转动板和装肉丁框配合;第二弹簧,安装在滑动板与支撑柱之间。
进一步的是,还包括有自动挡料组件,自动挡料组件包括有:挡料板,安装在推料凹形板上;第二导轨,安装在下料框两侧;第三连杆,滑动式安装在第二导轨上,第三连杆与挡料板连接;第三弹簧,安装在第三连杆与相近的第二导轨之间。
进一步的是,还包括有自动切丁组件,自动切丁组件包括有:第三支撑杆,安装在第二支撑板上;第六连杆,转动式安装在第三支撑杆上,第六连杆与第四连杆连接;第二半齿轮,安装在第六连杆上;第四支撑板,安装在下料框两侧;第四滑轨,安装在下料框两侧;第二齿条,滑动式安装在第四滑轨上,第二齿条与第二半齿轮啮合;第六弹簧,安装在第二齿条与相近的第四支撑板之间;第七连杆,转动式安装在第二齿条之间,第七连杆与第一导轨配合。
本发明的有益效果为:本发明可通过下料组件将生物肉类放置与支撑组件上,随后通过自动推料组件与自动切丁组件带动手动推料组件与手动切丁组件进行工作,将生物肉类推出并进行切丁工作,在将生物肉类推出时,自动挡料组件会对下料组件上部的生物肉类进行阻挡,防止下料组件上部的生物肉类落下,在完成生物肉类的切丁工作后,手动推料组件还会将切丁完成的生物肉类推至装料组件内进行收集,操作较为简便,工作效率较高。
附图说明
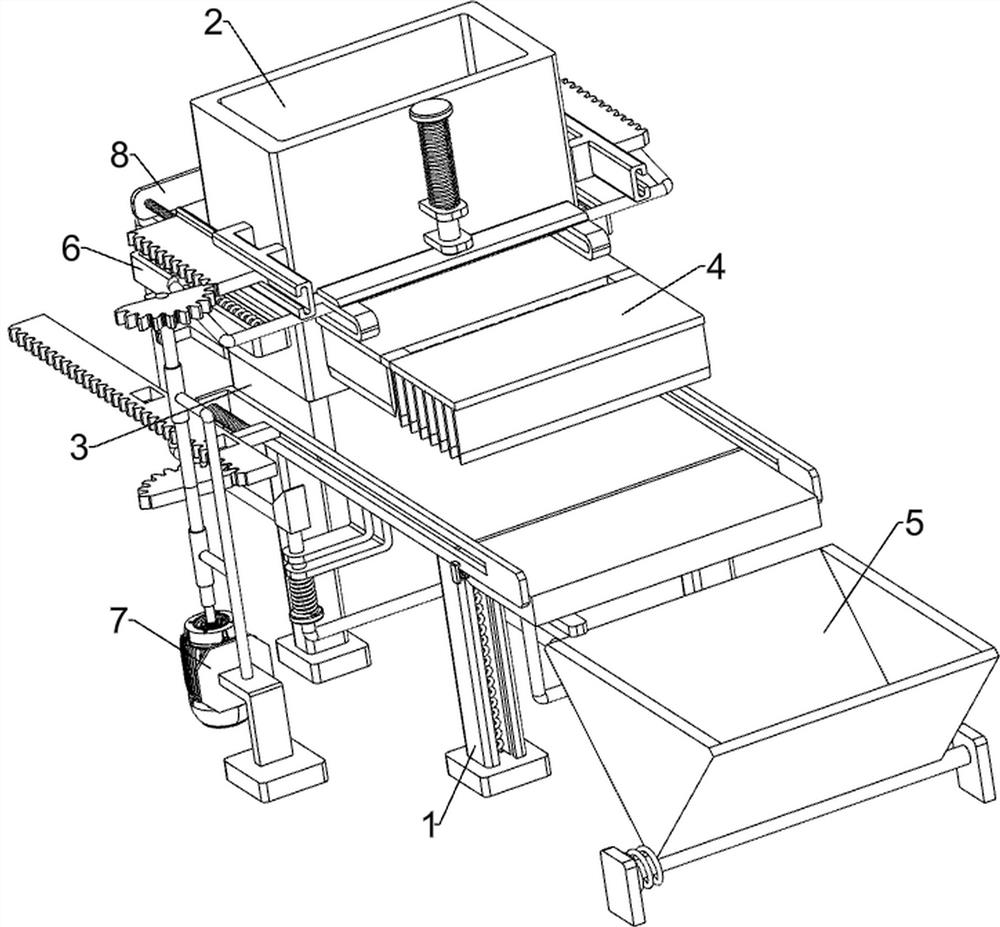
图1为本发明的立体结构示意图。
图2为本发明支撑组件的立体结构示意图。
图3为本发明下料组件的立体结构示意图。
图4为本发明手动推料组件的立体结构示意图。
图5为本发明手动切丁组件的立体结构示意图。
图6为本发明装料组件的立体结构示意图。
图7为本发明自动挡料组件的立体结构示意图。
图8为本发明自动推料组件的立体结构示意图。
图9为本发明自动切丁组件的立体结构示意图。
以上附图中:1:支撑组件,11:支撑柱,12:第一支撑板,13:滑槽,2:下料组件,21:第一支撑杆,22:下料框,3:手动推料组件,31:推料凹形板,32:滑块,4:手动切丁组件,41:竖切刀具,42:横切刀具,43:第一导轨,44:第一连接板,45:第二连接板,46:第一连杆,47:第一弹簧,5:装料组件,51:第三连接板,52:第二连杆,53:装肉丁框,54:第一扭力弹簧,55:转动板,56:滑动板,57:第四连接板,58:第二扭力弹簧,59:第二弹簧,6:自动挡料组件,61:挡料板,62:第二导轨,63:第三连杆,64:第三弹簧,7:自动推料组件,71:第三滑轨,72:第四弹簧,73:第一齿条,74:第二支撑板,75:电机,77:第四连杆,78:第一半齿轮,79:第三支撑板,710:楔形块,711:第五连杆,712:第五弹簧,713:异形杆,8:自动切丁组件,81:第三支撑杆,82:第六连杆,83:第二半齿轮,84:第四支撑板,85:第四滑轨,86:第二齿条,87:第六弹簧,88:第七连杆。
具体实施方式
现在将参照附图在下文中更全面地描述本发明,在附图中示出了本发明当前优选的实施方式。然而,本发明可以以许多不同的形式实施,并且不应被解释为限于本文所阐述的实施方式;而是为了透彻性和完整性而提供这些实施方式,并且这些实施方式将本发明的范围充分地传达给技术人员。
实施例1
一种生物肉类用的切丁装置,如图1至5所示,包括有支撑组件1、下料组件2、手动推料组件3、手动切丁组件4和装料组件5,支撑组件1后部设有下料组件2,支撑组件1上部滑动式设有手动推料组件3,下料组件2上设有手动切丁组件4,支撑组件1前侧设有装料组件5。
当需要对生物肉类进行切丁工作时,首先将肉类放置于下料组件2内,肉类会落在支撑组件1上,随后便可控制手动推料组件3将最下侧的肉类向前侧推动,当肉类移动至手动切丁组件4下方时,便可控制手动切丁组件4对肉类进行切割,切割完成后继续控制手动推料组件3将肉类向前侧推动,而后再次控制手动切丁组件4对肉类进行切割,便可完成肉类的切丁工作,接着将切丁后的肉类取下并控制手动推料组件3复位即可。
支撑组件1包括有支撑柱11和第一支撑板12,支撑柱11顶部设有第一支撑板12,支撑柱11前部左侧开有滑槽13。
在放置生物肉类时,首先将肉类放置于下料组件2内,肉类会落在第一支撑板12上,并会在第一支撑板12上进行切丁工作。
下料组件2包括有第一支撑杆21和下料框22,支撑柱11后部左右两侧均连接有第一支撑杆21,第一支撑杆21上部之间连接有下料框22。
在放置生物肉类时,将肉类放置于下料框22内,肉类会通过下料框22落于第一支撑板12上。
手动推料组件3包括有推料凹形板31和滑块32,第一支撑板12上部滑动式设有推料凹形板31,推料凹形板31左右两侧均连接有滑块32。
当放置好生物肉类后,便可控制滑块32向前侧移动,滑块32会带动推料凹形板31向前侧移动,从而将生物肉类向前侧推动,当生物肉类切丁完成后,便可控制推料凹形板31和滑块32复位。
手动切丁组件4包括有竖切刀具41、横切刀具42、第一导轨43、第一连接板44、第二连接板45、第一连杆46和第一弹簧47,下料框22前部上下对称设有第二连接板45,第二连接板45之间滑动式设有第一连杆46,第一连杆46与第二连接板45之间连接有第一弹簧47,第一连杆46下部连接有第一连接板44,第一连接板44下部左右两侧均连接有第一导轨43,第一导轨43下部之间连接有竖切刀具41,竖切刀具41前侧连接有横切刀具42。
当生物肉类移动至竖切刀具41下侧时,便可控制生物肉类停止移动,随后控制第一连杆46向下移动,第一弹簧47被压缩,第一连杆46下移便会带动第一连接板44、第一导轨43、竖切刀具41和横切刀具42向下移动,竖切刀具41下移便会对生物肉类进行切割,随后停止控制第一连杆46,第一弹簧47会进行回弹并带动手动切丁组件4复位,而后便可控制生物肉类继续向前移动,当生物肉类移动至横切刀具42下侧时,便可再次控制第一连杆46向下侧移动,使得横切刀具42对生物肉类进行切割,从而完成生物肉类的切丁工作,接着松开第一连杆46,手动切丁组件4复位,而后将切丁后的生物肉类取下收集。
实施例2
在实施例1的基础之上,如图1、图6、图7、图8和图9所示,还包括有自动推料组件7,自动推料组件7包括有第三滑轨71、第四弹簧72、第一齿条73、第二支撑板74、电机75、第四连杆77、第一半齿轮78、第三支撑板79、楔形块710、第五连杆711、第五弹簧712和异形杆713,第一支撑板12左右两侧均连接有第三滑轨71,滑块32与相近的第三滑轨71滑动式配合,滑块32与相近的第三滑轨71之间连接有第四弹簧72,左方的滑块32左侧连接有第一齿条73,支撑柱11左方放置有第二支撑板74,第二支撑板74上部通过螺栓固接有电机75,电机75的输出轴上连接有第四连杆77,第四连杆77上部连接有第一半齿轮78,第一半齿轮78与第一齿条73啮合,第一支撑板12下部左侧连接有第三支撑板79,第三支撑板79左侧滑动式设有第五连杆711,第五连杆711上部连接有楔形块710,楔形块710与第一齿条73配合,第五连杆711与第三支撑板79之间连接有第五弹簧712,第五连杆711下部连接有异形杆713。
当放置好生物肉类后,便可控制电机75开始工作,电机75会带动第四连杆77和第一半齿轮78进行旋转,第一半齿轮78旋转便会带动第一齿条73向前移动,推料凹形板31和滑块32随之进行移动,第四弹簧72被拉伸,当第一齿条73移动至与楔形块710接触时,便会带动楔形块710、第五连杆711和异形杆713向下移动,第五弹簧712被拉伸,当第一半齿轮78旋转至不与第一齿条73啮合时,第五弹簧712开始回弹,带动楔形块710、第五连杆711和异形杆713复位,使得楔形块710卡入第一齿条73内,此时手动切丁组件4第一次对生物肉类进行切丁工作,当第一半齿轮78旋转至再次与第一齿条73啮合时,便会再次带动第一齿条73向前移动,楔形块710再次被推至向下移动,当第一半齿轮78再次旋转至不与第一齿条73啮合时,楔形块710再次卡入至第一齿条73内,随后手动切丁组件4第二次对生物肉类进行切丁工作,当生物肉类切丁工作完成后,便可控制异形杆713向下移动,楔形块710和第五连杆711向下移动,第五弹簧712被拉伸,当楔形块710移动至不与第一齿条73配合后,第四弹簧72会进行回弹,从而带动推料凹形板31、滑块32和第一齿条73复位,当第一齿条73完全复位后,松开异形杆713,第五弹簧712会进行回弹并带动楔形块710、第五连杆711和异形杆713复位,当所有的生物肉类都完成切丁工作后,便可控制电机75停止工作。
还包括有装料组件5,装料组件5包括有第三连接板51、第二连杆52、装肉丁框53、第一扭力弹簧54、转动板55、滑动板56、第四连接板57、第二扭力弹簧58和第二弹簧59,支撑柱11前方对称放置有第三连接板51,第三连接板51之间转动式设有第二连杆52,第二连杆52中部设有装肉丁框53,第二连杆52与左方的第三连接板51之间连接有第一扭力弹簧54,左方的第三滑轨71左部前侧连接有第四连接板57,第四连接板57上转动式设有转动板55,转动板55与第四连接板57之间连接有第二扭力弹簧58,滑槽13内滑动式设有滑动板56,滑动板56与异形杆713连接,滑动板56与转动板55和装肉丁框53配合,滑动板56与支撑柱11之间连接有第二弹簧59。
当生物肉类完成切丁工作后,可控制第一半齿轮78继续旋转,使得推料凹形板31和滑块32继续向前侧移动,从而将已完成切丁工作的生物肉类推至转动板55上,转动板55会在自身与生物肉类的重力作用下向下旋转,第二扭力弹簧58发生形变,转动板55旋转会带动滑动板56向下移动,第二弹簧59被压缩,滑动板56下移便会带动异形杆713向下移动,滑动板56下移还会带动第二连杆52和装肉丁框53向后侧旋转,第一扭力弹簧54发生形变,此时完成切丁工作的生物肉类会沿着倾斜的转动板55落至装肉丁框53内,由于减少了生物肉类的重力,第一扭力弹簧54、第二扭力弹簧58和第二弹簧59均会回弹,带动转动板55、滑动板56、异形杆713、第二连杆52和装肉丁框53复位,如此,便可对切丁完成的生物肉类进行收集,且无需使用者控制异形杆713进行移动,操作较为简便。
还包括有自动挡料组件6,自动挡料组件6包括有挡料板61、第二导轨62、第三连杆63和第三弹簧64,推料凹形板31后部连接有挡料板61,下料框22左右两侧均连接有第二导轨62,第二导轨62上均滑动式设有第三连杆63,第三连杆63与挡料板61连接,第三连杆63与相近的第二导轨62之间连接有第三弹簧64。
当推料凹形板31向前侧移动时,还会带动挡料板61向前侧移动,第三连杆63随之向前侧移动,第三弹簧64被压缩,从而使得下料框22上部的肉类无法向下移动,当推料凹形板31复位时,挡料板61和第三连杆63随之复位,同时第三弹簧64回弹,下料框22上部的肉类开始下落。
还包括有自动切丁组件8,自动切丁组件8包括有第三支撑杆81、第六连杆82、第二半齿轮83、第四支撑板84、第四滑轨85、第二齿条86、第六弹簧87和第七连杆88,第二支撑板74上部连接有第三支撑杆81,第三支撑杆81上部转动式设有第六连杆82,第六连杆82与第四连杆77连接,第六连杆82上部连接有第二半齿轮83,下料框22后部左右两侧均连接有第四支撑板84,下料框22左右两侧均连接有第四滑轨85,第四滑轨85上均滑动式设有第二齿条86,第二齿条86与第二半齿轮83啮合,第二齿条86与相近的第四支撑板84之间连接有第六弹簧87,第二齿条86之间转动式连接有第七连杆88,第七连杆88与第一导轨43配合。
在第四连杆77进行旋转时,还会带动第六连杆82和第二半齿轮83进行旋转,当第一半齿轮78与第一齿条73脱离啮合时,第二半齿轮83开始与第二齿条86啮合,带动第二齿条86向前侧移动,第六弹簧87被拉伸,第二齿条86前移会通过第七连杆88带动第一导轨43向下移动,第一导轨43其上零件随之向下移动,从而开始进行生物肉类的切丁工作,当第二半齿轮83旋转至不与第二齿条86啮合时,第六弹簧87便会带动第二齿条86和第七连杆88复位,手动切丁组件4随之自动进行复位,如此,便无需使用者控制手动切丁组件4进行运动。
尽管已经仅相对于有限数量的实施方式描述了本公开,但是受益于本公开的本领域技术人员将理解,在不脱离本发明的范围的情况下,可以设计各种其他实施方式。因此,本发明的范围应仅由所附权利要求限制。
- 一种生物肉类用的切丁装置
- 一种肉类微生物检测用粉碎装置