一种基于VMD算法的多路径削弱方法与装置
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及全球导航卫星系统(GNSS)应用于静态环境下的多路径削弱技术领域,具体涉及一种基于VMD算法的多路径削弱方法与装置。
背景技术
全球卫星导航定位系统(GNSS)目前已在多个高精度定位领域得到了广泛应用,包括传统测绘、变形监测等。对于多路径延迟,由于其难以参数化并且不能通过差分的方式进行消除或削弱,因此成为了GNSS高精度应用中最主要的误差源。
根据已有研究可知,多路径延迟只与卫星和反射物的相对位置有关,并且由于卫星轨道是重复的,所以多路径延迟在时间和空间上均存在重复性。对于静态或准静态(桥梁等)环境,目前主要有恒星日滤波(SF)和查表法(或称多路径半球图,MHM)等多路径削弱算法,其中MHM算法不用考虑不同星座轨道重复周期不同,且不受卫星轨道机动的影响,因此更适合于实时数据处理。针对多路径改正模型中包含的观测噪声,MHM算法根据多天的后处理多路径延迟计算每个网格中的平均值改正,来削弱噪声的影响。但是对目前常用的MHM算法进行分析发现,即使在1°×1°的网格内同一颗卫星的多路径仍然具有较明显的变化趋势,所以通过求取网格内多路径均值来削弱噪声影响的方法是不够严谨的。因此,本发明提出利用变分模态分解(VMD)算法对提取出的多路径延迟进行去噪,以提升多路径改正模型的精度。改进后的多路径削弱模型能够大幅削弱GNSS观测值残差,进而提升变形监测的精度、收敛速度及可靠性。
目前GNSS技术在变形监测中的应用越来越普遍,其中多路径建模及削弱对于提升GNSS监测的精度及可靠性具有显著意义。因此,研究改进的多路径削弱方法,具有重要的现实意义。
发明内容
发明目的:针对传统MHM算法无法很好处理噪声对多路径模型精度影响的缺点,利用固定环境下多路径延迟的空间重复性,提出了基于VMD和MHM算法的MHM_V模型,以提高多路径建模的精度,进而提升GNSS解算的可靠性、成功率及精度。
技术方案:为实现上述发明目的,本发明采用的技术方案为:一种基于VMD算法的多路径削弱方法,该方法包括如下步骤:
(1)针对历史GNSS观测数据,利用单差观测模型,计算所有卫星的载波和伪距观测值单差残差;
(2)利用VMD算法从观测值单差残差中分离出多路径延迟,根据卫星高度角和方位角建立多路径改正数据库;
(3)依据高度角和方位角最近原则,根据多路径的空间重复性,实时对当前观测值进行多路径改正。
进一步的,所述步骤(1)中利用单差观测模型计算所有卫星的载波和伪距观测值单差残差,所述单差观测模型表示为:
式中,Δ表示单差算子,
进一步的,将已知的单差站星距、双差载波模糊度代入公式(1)和(2)中,再利用最小二乘原理求得单差卫星钟差,即可得到各卫星的载波和伪距单差残差,其中包含了多路径延迟及观测值噪声:
式中:
进一步的,利用VMD算法从单差残差中分离出多路径延迟,相较于传统多路径削弱算法,可以降低观测值噪声对多路径模型精度的影响。
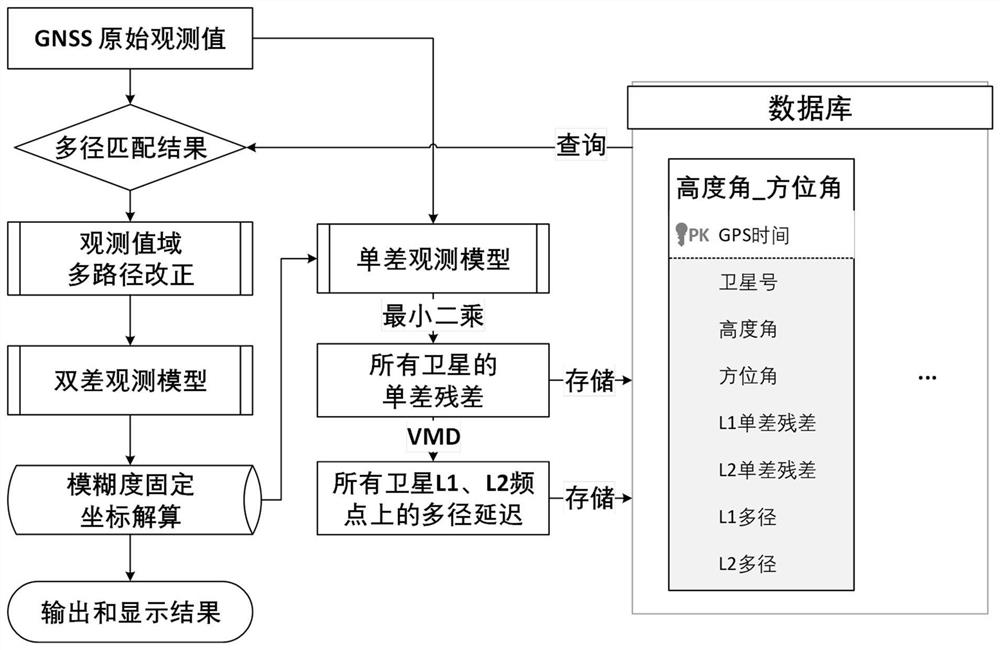
进一步的,所述步骤(2)中根据卫星高度角和卫星方位角建立的多路径改正数据库,具体方法为:按卫星高度角和方位角分别为10°间隔建立数据库中的数据表,并以“高度角_方位角”的格式对数据表进行命名(如:数据表10_20,用于存储高度角在10-20°,方位角在20-30°之间卫星的多路径改正信息),数据表中字段包含卫星PRN号、GPS时间、观测值残差、VMD算法提取的伪距多路径和载波多路径等。所有高度角和方位角的数据表构成了步骤(2)中所述的多路径改正数据库。
进一步的,所述步骤(3)中对观测值进行多路径改正具体描述为,根据当前时刻某颗卫星的PRN号、高度角、方位角信息,从数据库中查找相应的多路径改正值,将该卫星的伪距和载波观测值减去相应的多路径改正值,对所有卫星观测值重复上述步骤即完成当前时刻的多路径改正。
式中,
进一步的,所述步骤(3)中高度角和方位角最近原则具体方法为:待改正卫星的高度角和方位角与多路径改正模型中高度角和方位角差值的绝对值之和最小,根据此原则在多路径改正数据库中匹配相应的多路径改正值。
本发明还提出一种改进的多路径削弱装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述计算机程序被加载至处理器时实现任一项所述的改进的多路径削弱方法。
本发明还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现任一项所述的改进的多路径削弱方法。
有益效果:与现有技术相比,本发明的技术方案具有以下有益技术效果:
本发明针对传统MHM算法无法很好处理噪声对多路径影响这一不足,利用固定环境下多路径延迟的空间重复性,提出了基于VMD算法的MHM_V模型。本方法充分利用VMD算法可以很好地避免模态混叠问题及端点效应这一优势,将其应用于消除单差残差中的载波噪声,并由此提高多路径改正模型的精度。结合MHM算法参数少、建模简单,以及在实时解算中的优势,大幅缩减了GNSS观测值受多路径延迟的影响,提升了GNSS在变形监测中的模糊度解算成功率、可靠性及定位精度。
附图说明
图1为改进的多路径削弱方法流程图;
图2为载波单差残差及VMD提取结果;
图3为多路径削弱后各卫星载波残差缩减结果;
图4为多路径建模数据天数对多路径削弱效果的影响结果;
图5为多路径削弱前后模糊度固定Ratio值对比结果;
图6为多路径削弱前后模糊度浮点解偏差对比结果。
具体实施方式
下面结合附图对本发明作更进一步的说明。
如图1所示,本发明实施例公开的一种改进的多路径削弱方法,首先针对历史观测数据,利用单差观测模型,计算所有卫星的载波和伪距观测值单差残差;其次用VMD算法从观测值单差残差中分离出多路径延迟,建立多路径改正模型,将其存入到数据库中;最后依据高度角和方位角最近原则,根据多路径的空间重复性,对当前观测值进行多路径改正。该方法包括如下具体步骤:
步骤1)利用单差观测模型,计算所有卫星的载波和伪距观测值单差残差:
通过事后解算求得站星距及载波模糊度,代入单差观测模型中即可计算所有卫星的载波和伪距观测值单差残差。所述单差观测模型表示为:
式中:Δ表示单差算子,
步骤2)利用VMD算法从观测值单差残差中分离出多路径延迟,建立多路径改正模型,将其存入到数据库中,具体包括如下步骤:
a),利用VMD算法从观测值残差中分离出多路径延迟,以实现对观测值残差进行去噪的目的。
b),将卫星PRN号、GPS时间、卫星高度角、卫星方位角、观测值残差、VMD算法提取的多路径延迟等信息存入到数据库或文本文件中,建立多路径改正模型。
步骤3)依据高度角和方位角最近原则,根据多路径的空间重复性,对后续观测值进行多路径改正。
a),高度角和方位角最近原则可具体描述为:
多路径改正模型中高度角和方位角与待改正卫星的高度角和方位角差值的绝对值之和最小;对于由多天数据建立的多路径改正模型,最终多路径改正值确定方法为,通过高度角和方位角最近原则得到每天的改正值,并对多天改正值求取均值。
b),利用高度角和方位角最近原则得到多路径改正值,对当前历元所有卫星的观测值进行改正。
基于相同的发明构思,本发明实施例公开的一种改进的多路径削弱方法装置,该装置可以是应用于变形监测等领域的设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,该计算机程序被加载至处理器时实现上述改进的多路径削弱方法。
图2为载波单差残差及VMD提取结果,从上到下依次为载波残差、多路径延迟和载波观测值噪声,左侧表示上述各值的时序结果,右侧表示上述各值的频谱图。可以看出分离出来的噪声与高度角呈明显的负相关关系,即观测噪声随高度角的降低而明显增大,符合载波噪声的特性,说明利用VMD算法可有效提取出的多路径延迟。
图3为多路径削弱后各卫星载波残差缩减结果,可以看出,本发明提出的MHM_V算法对多路径的削弱效果要明显优于MHM算法;使用MHM_V算法削弱多路径后卫星残差RMS值会更小,相较于不进行多路径改进卫星L1和L2载波残差RMS分别降低了38%和41%左右,而使用MHM算法卫星残差RMS分别降低了26%和31%左右。
图4为多路径建模数据的天数对多路径削弱效果的影响结果,可以看出,MHM_V对多路径的削弱效果比MHM高约10%,载波L2的残差改善率要优于载波L1;对于MHM_V方法,多路径削弱效果随着多路径建模数据天数的增加而提升,从1天到5天持续提升,然后稳定在40%的水平。
图5为多路径削弱前后模糊度固定Ratio值对比结果,以ratio等于3为阈值,作为模糊度是否固定成功的判断条件,统计得未削弱多路径情况下固定成功率为88.0%,利用本方法提出的MHM_V算法对多路径进行消除后模糊度固定成功率达到了99.4%;
图6为多路径削弱前后模糊度浮点解偏差对比结果,利用MHM_V方法对多路径进行削弱后,所有模糊度浮点解偏差小于0.5周所需的时间(收敛时间)更短,且收敛后的浮点解偏差相较于不进行多路径改正会更小。
- 一种基于VMD算法的多路径削弱方法与装置
- 基于深度学习LSTM的GNSS多系统多路径误差实时削弱方法