一种车辆巡迹碰撞安全测试系统及方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及汽车测试领域,具体涉及一种车辆巡迹碰撞安全测试系统及方法。
背景技术
车辆碰撞安全性能开发离不开碰撞安全测试系统,目前整车碰撞安全测试系统一般由灯光系统、摄像系统、数据采集系统和车辆牵引系统组成。
上述碰撞安全测试系统的车辆牵引系统存在如下缺点:(1) 一般需要电机作为额外动力源,且需要专用轨道、钢缆,占地面积大,对场地要求非常高;(2)所提供能量有限,车辆被牵引产生的最高速度一般在80km/h左右;(3)车辆碰撞前运行路线受限,一般为直线;(4)车辆在碰撞发生前较难实现中途减速;(5)车辆试验时为非正常工作状态,无法模拟车辆处于正常工作状态下的碰撞安全过程。
发明内容
本发明的目的在于提供一种车辆巡迹碰撞安全测试系统及方法,使车辆能:(1)在测试过程中车辆所有系统均在正常工作状态;(2)在碰撞测试全过程使用自身动力驱动;(3)按照预先设定的状态巡航并发生碰撞。
本发明的技术方案如下:
本发明实施例提供了一种车辆巡迹碰撞安全测试方法,应用于车辆状态测试系统,包括:
控制位于测试场景中的被测试车辆上在测试道路上按照预设行车轨迹和预设行车参数进行自动行驶;
实时采集被测试车辆在测试道路上自动行驶的实时行车状态信息;
将实时行车状态信息和预设行车状态信息进行偏差比对;
若所述实时行车状态信息和所述预设行车状态信息的偏差值超过设定偏差值范围,则控制被测试车辆进行转向、加速和/或制动动作,使被测试车辆继续按照预设行车轨迹和预设行车参数撞向位于测试场景中设定位置处的目标物。
其中,所述行车状态信息包括:被测试车辆的实时车速、实时位置和实时制动力;预设行车状态信息包括:预设行车轨迹中的每一轨迹点所对应的预设位置、预设车速和预设制动力。
其中,所述实时行车状态信息和所述预设行车状态信息的偏差值超过设定偏差值范围是指:被测试车辆在连续N个轨迹点对应的实时车速与各轨迹点对应的预设车速之间的偏差均超过预设车速阈值范围、被测试车辆在连续N个轨迹点对应的实时制动力与各轨迹点对应的预设制动力之间的偏差均超过预设车速阈值范围,和/或被测试车辆在连续N个轨迹点对应的实时位置与各轨迹点对应的预设位置之间的偏差均超过预设车速阈值范围。
本发明实施例还提供了一种车辆巡迹碰撞安全测试系统,包括位于测试场景中的被测试车辆、测试路面和目标物;以及搭载在被测试车辆上的车辆状态控制系统;所述车辆状态控制系统包括:
执行模块,用于控制位于测试场景中的被测试车辆上在测试道路上按照预设行车轨迹和预设行车参数进行自动行驶;
监测模块,用于实时采集被测试车辆在测试道路上自动行驶的实时行车状态信息;
中央处理模块,用于将实时行车状态信息和预设行车状态信息进行偏差比对;以及用于若所述实时行车状态信息和所述预设行车状态信息的偏差值超过设定偏差值范围,则通过控制执行模块控制被测试车辆进行转向、加速和/或制动动作,使被测试车辆继续按照预设行车轨迹和预设行车参数撞向位于测试场景中设定位置处的目标物。
本发明的技术方案为:
1.采用车辆自身动力巡航,不需额外动力,且车辆速度理论上可达到车辆最大设计速度;
2.测试全过程,车辆各系统均处于正常工作状态,更能模拟真实碰撞事故;
3.通过车辆状态控制系统控制车辆巡航进行碰撞试验,降低试验对路面质量的要求,减少碰撞试验对厂房设备的投入要求。
附图说明
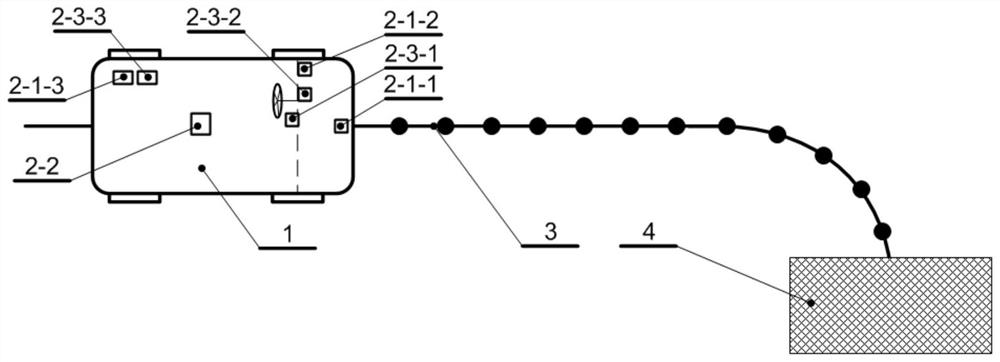
图1是车辆巡迹碰撞安全测试系统示意图;
图2是车辆状态控制系统工作流程图。
具体实施方式
下面将参照附图更详细地描述本发明的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
参照图1,本发明实施例提供了一种车辆巡迹碰撞安全测试系统,其包括被测试车辆1、搭载在被测试车辆1上的车辆状态控制系统2、路面3、目标物4。
其中,所述车辆状态控制系统2包含监测模块2-1、中央处理模块2-2、执行模块2-3。
所述监测模块2-1包含但不限于轨迹监测单元2-1-1、速度监测单元2-1-2、制动力监测单元2-1-3,还可包含悬架行程监测单元、安全带回卷力监测单元等。
进一步的,轨迹监测单元2-1-2可以由铺设于路面3上的信标和安装于车辆上的信号收发装置共同组成,也可由高精度地图和车辆导航系统组成。
进一步的,轨道监测单元2-1-2中的铺设于路面3上的信标或高精度地图可根据实际需要摆放或设定为曲线,以实现转弯碰撞或转弯侧翻。
所述中央处理模块2-2,包含计算单元2-2-1、判断单元2-2-2和决策单元2-2-3。
所述执行模块2-3包含但不限于转向执行单元2-3-1、加速执行单元2-2-2、制动执行单元2-3-3,上述单元可直接采用车辆原有的执行机构。
进一步的,制动执行单元2-3-3可以在中央处理单元2-2的指令下按照要求制动,让车辆在碰撞发生前,产生使碰撞假人离位的减速度,从而完成非正常坐姿状态下,车辆乘员保护性能的考察。
参照图2,所述车辆状态控制系统2实现车辆巡迹碰撞安全测试的工作逻辑如下:
首先,监测模块2-1搜集被测试车辆的实时状态信息,所收集的被测试车辆实时状态信息包括:被测试车辆的实时位置、实时车速、实时制动力信息(步骤S1-1),并将上述信息传递给中央处理模块2-2(步骤S1-1-1、S1-1-2、S1-1-3)。
进一步的,中央处理模块2-2的计算单元2-2-1调用预先设定的车辆状态信息,预先设定的车辆状态信息包括:车辆的预设行车轨迹、车辆在预设行车轨迹中的不同轨迹点对应的预设位置、预设车速和预设制动力(步骤S2-1-1、S2-1-2、S2-1-3)。
进一步的,中央处理模块2-2的计算单元2-2-1将车辆实时状态信息,与预先设定的车辆状态信息进行计算比较(步骤S2-1);
进一步的,中央处理模块2-2的判断单元2-2-2进行每一轨迹点位置处的轨迹偏差判断、车速偏差判断、制动力偏差判断(步骤S2-2-1、S2-2-2、S2-2-3);
进一步的,中央处理模块2-2的决策单元2-2-3基于判断单元2-2-2的结果向执行模块2-3发出指令;
进一步的,当车辆实时状态与设定值偏差在规定范围内时,则执行模块2-3不动作,以保持车辆状态(步骤S3-4);当车辆实时状态与设定值偏差超出规定范围时,则转向执行单元2-3-1动作(步骤S3-1)或加速执行单元2-3-2动作(步骤S3-2)或制动执行单元2-3-3动作(步骤S3-3);
所述车辆状态控制系统2可由预先设定的算法或远程遥控,实现在无人或无任何机械设备操控车辆方向盘、加速踏板和制动踏板的情况下,使车辆按照预先设定的轨迹、预先设定的车速或预先设定的制动力自动巡航进行碰撞试验;
所述目标物4位于车辆行驶轨迹的末端,其可以是不同形状的壁障、不同坡度的坡道、不同高度的台阶等,实现车辆不同形式的碰撞;
进一步目标物4也可以是另一台或多台搭载车辆状态控制系统2的车辆,以实现两车或多车碰撞。
- 一种车辆巡迹碰撞安全测试系统及方法
- 一种赛道识别方法、识别系统、智能车巡迹方法及巡迹系统