一种安全阀智能整定压力测定系统
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及压力检测技术领域,尤其是涉及一种安全阀智能整定压力测定系统。
背景技术
安全阀是一种特种设备,需要每隔一年就进行压力整定,即到国家认可的机构进行压力起跳测试,当安全阀内部的压力达到设定的压力值后,安全阀开启,压力值下降。当安全阀连续三次正确开启,起跳压力满足整定压力的误差范围内,则确认该整定压力有效,否则应该继续调教安全阀,重复上述实验直到达到要求为准。
安全阀压力整定最为关键的就是获取安全阀开启瞬间的试验介质的压力。现在一般的安全阀叫烟台均使用了压力传感器作为压力的获取手段,同时使用采集软件,在手工操作试验压力的时候记录安全阀进口压力,寻找压力的最大值作为整定压力。相比人工观察精密压力表,这种技术大大增加了整定压力的获取的准确性和可记录行,提高了校验的可靠性。
但目前这种技术存在如下问题:
1当压力上升过程中出现噪声脉冲,很容易误判为整定压力;
2压力记录中的最大值点是否就是整定压力。根据校验台的物理结构,通常用来记录整定压力的传感器距离安全阀进口还有一段距离,由于流体压力的传播特性,压力具有滞后性,这使得压力测试存在误差;
3连续的压力测试中,操作员往往为了省时间,往往不按照国标的要求,直接快速升压到整定压力附近;同时,第一次起跳后迅速升压完成第二次、第三次测试,间隔压力不够,造成测试的不准确性。
当前已有的专利和论文,主要进行了机构方面的设计,或者利用一些算法,单纯的对波形进行滤波处理,尚未根据国标,综合设计智能采集系统。
发明内容
本发明的发明目的是,提供一种安全阀智能整定压力测定系统,自动根据国家标准,进行安全阀整定压力的采集。
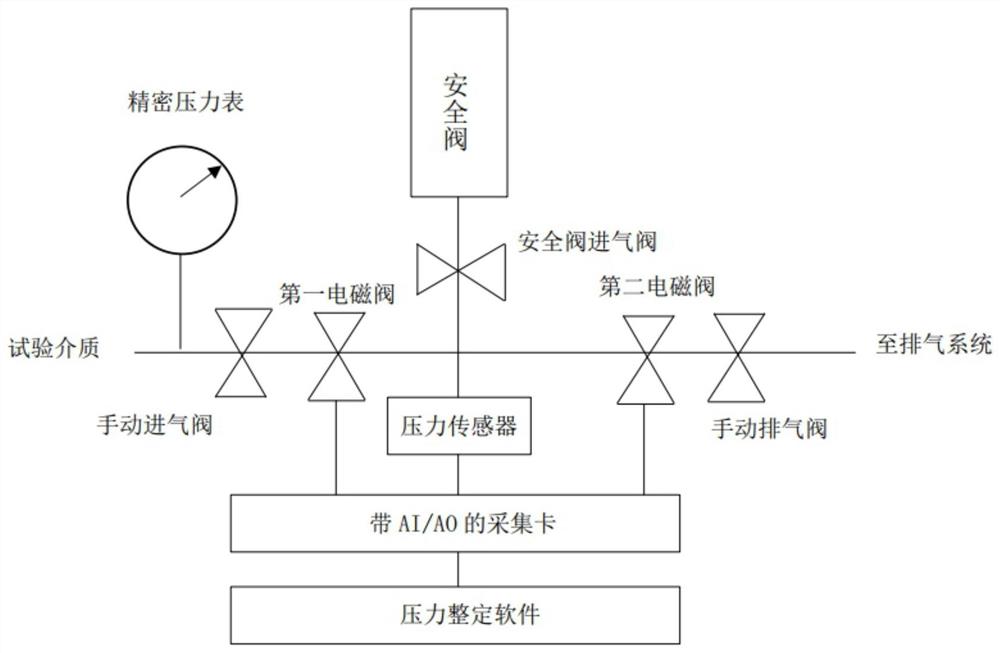
本发明提供一种安全阀智能整定压力测定系统,包括,精密压力表,手动进气阀,第一电磁阀,第二电磁阀,安全阀,安全阀进气阀,压力传感器,采集卡,计算装置;
精密压力表与手动进气阀第一端连接;
手动进气阀第一端与实验介质存储装置连接;
手动进气阀第一端与第一电磁阀第一端连接;
第一电磁阀第二端分别与安全阀进气阀第二端和第二电磁阀第一端连接;
安全进气阀第一端与安全阀连接;
第二电磁阀第二端与手动排气阀第一端连接;
手动排气阀第二端与排气系统连接;
压力传感器与第一电磁阀第二端连接;
采集卡分别与第一电磁阀,压力传感器,第二电磁阀,计算装置电连接;
计算装置运行压力整定软件。
进一步的,所述采集卡具有模拟输入通道和模拟输出通道。
进一步的,所述压力测定系统执行以下步骤:
S1系统初始化,采用PID算法进行升压控制,实现0.05-0.08MPa/s的匀速压力上升,采用采集卡模拟输出通道进行4-20mA的电流输出以控制第一电磁阀的开度,采集卡的模拟输入通道采集传感器的压力;
S2关闭第二电磁阀,打开第一电磁阀,快速上升到P1压力点,P1压力点为整定压力数值的0.9倍,步骤S2期间不采用PID算法;
S3超过P1压力点以后,采用系统初始化后的串级PID算法,同时控制第一电磁阀和第二电磁阀的开度,确保压力升速,同时出发压力开始保存;
S4起跳后终止PID控制,关闭第一电磁阀,全开第二电磁阀,迅速降压到P2压力点,P2压力点为整定压力数值的0.6倍,关闭第二电磁阀,中止压力采集值保存;
S5压力整定软件判定起跳压力是否符合规范,若连续三次压力整定值符合规范,本次整定结束,同时得到三次整定的压力连续值,若起跳压力不满足规范,则计数器清零,操作人员重新调整安全阀并从步骤S2重新开始压力测定流程。
本发明的有益效果是,。
1)系统自动控制试验介质压力,最开始是快速升压,在90%的整定压力后以不超过0.01MPa/s的速度自动升压,直到安全阀起跳,保证升压速度;
2)系统自动给出原始波形,记录整定值;
3)整定过程自动化。
附图说明
图1为整定压力采集系统示意图。
图2为整定压力系统工作流程示意图。
具体实施方式
国家相关标准对整定压力要求是,缓慢升高安全阀的进口压力,当达到整定压力的90%时,升压速度不得超过0.01MPa/s。当测到阀瓣有开启或见到、听到试验介质的连续排除时,则安全阀的进口压力视为安全阀的整定压力,安全阀应该进行连续的压力校验和密封实验,一般不少于2次。
发明人发现,为了满足国家标准对整定的要求,在整定过程中需要满足以下条件:
1)整定压力是由于安全阀试验介质的压力增高,由于压力能转化动能,安全阀起跳;
2)升高压力的速度必须限制,防止由于气体流量冲击引起起跳,造成测量误差;
3)连续多次测量之间必须有压力间隔,以保证安全阀关闭动作
为了满足上述国家标准对整定压力的要求,本发明提供一种安全阀智能整定压力测定系统,包括,精密压力表,手动进气阀,第一电磁阀,第二电磁阀,安全阀,安全阀进气阀,压力传感器,采集卡,计算装置;
精密压力表与手动进气阀第一端连接;
手动进气阀第一端与实验介质存储装置连接;
手动进气阀第一端与第一电磁阀第一端连接;
第一电磁阀第二端分别与安全阀进气阀第二端和第二电磁阀第一端连接;
安全进气阀第一端与安全阀连接;
第二电磁阀第二端与手动排气阀第一端连接;
手动排气阀第二端与排气系统连接;
压力传感器与第一电磁阀第二端连接;
采集卡分别与第一电磁阀,压力传感器,第二电磁阀,计算装置电连接;
计算装置运行压力整定软件。
进一步的,所述采集卡具有模拟输入通道和模拟输出通道。
采集系统的硬件有电磁阀1、电磁阀2、带AO的压力采集卡、压力传感器和压力整定软件。电磁阀1和2需要适配管道压力,通常为4-20mA电流输入控制开度。压力传感器需要适配最高的整定压力,压力采集卡只要需要2通道的AO,以及24Bit的精度。
如图2所示,压力测定系统采用以下流程测定压力
S1系统初始化
本系统的初始化工作主要目的是要实现稳定升压,落实到本系统就是实现匀速升压,国标要求不超过0.1MPa/s。根据要求,本系统实现0.05-0.08MPa/s的匀速压力上升,考虑到为非线性系统,具有一定的滞后性和大惯性,只要实现该范围的升压速率就能满足国标要求。同时,速率不能太小,否则不能满足检测工作。本系统采用PID进行升压控制,系统初始化的目的就是进行PID的参数整定。本系统采用采集卡AO(模拟输出通道)进行4-20mA的电流输出,以控制电磁阀1的开度,采集的AI(模拟输入通道)采集传感器的压力。
本发明的PID控制模型如下:
理想的输出为直线,其斜率为
式中:k为采样序号,u(k)为第k次采样时刻的AO输出,e(k)为第k次采样时刻输入的偏差,∑e(k)为采样开始到第k次采样时刻之间偏差的累积和,Δe(k)为第k次采样时刻输入的偏差与第k-1次采样时刻的输入偏差;K
整定过程中,采用模糊PID整定实现,有用输出压力要求对升速进行限制,因此本发明设计了以下误差计算方法:
S11设置匀速上升国标限制:Δ
S12重采样。由于实际的采集卡采样频率较高,对采集值进行重采样到10Hz,取10个点数据里面的最高值点作为一个压力输出值P(k);
S13在下一个一秒以内,同样S11步骤的处理,得到压力输出值P(k+1);
S14动态调整误差。计算差分Δ=P(K+1)-P(K),当Δ
S14采用串级控制,主回路为进气第一电磁阀的开度、副回路为排气第二电磁阀的开度;
S15利用Matlab工具箱进行仿真设计,然后到实际系统进行控制,直到PID各参数调节满足要求为止。若不能满足要求,则调整下限Δ
S2根据压力整定流程,完成系统初始化后进行实际整定。关闭第二电磁阀,打开第一电磁阀,快速上升到压力点P1,P1为整定压力的0.9倍,步骤S2期间不采用PID算法;
S3超过P1压力点以后,采用系统初始化后的串级PID算法,同时控制第一电磁阀和第二电磁阀的开度,确保压力升速;同时出发压力开始保存;
S4起跳后终止PID控制,关闭第一电磁阀,开始全开第二电磁阀,迅速降压到压力点P2,压力点P2为整定压力的0.6倍;关闭第二电磁阀;中止压力采集值保存;
S5软件判定起跳压力是否符合规范,如果符合,有效计数器加一;如连续三次压力整定值符合规范,本次整定结束;同时得到三次整定的压力连续值;若起跳压力不满足规范,则计数器清零,操作人员重新调整安全阀;回到步骤S2。
本发明的有益效果是,本发明根据国标,综合设计智能采集系统,可以接入到当前已有的校验,可以检测起跳压力,保存波形,避免人工操作,符合国标的要求。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种安全阀智能整定压力测定系统
- 一种智能开启燃气安全阀阀门控制方法和系统