一种新型散热器高效焊接设备
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及散热器焊接技术领域,尤其涉及一种新型散热器高效焊接设备。
背景技术
涂布机主要用于薄膜、纸张等的表面涂布工艺生产,此机是将成卷的基材涂上一层特定功能的胶、涂料或油墨等,并烘干后收卷。
涂布机生产出来的布料需要利用散热器进行烘干,在散热器生产的过程中需要通过在其侧部焊接有进水口和出水口,现有中散热器的进水口和出水口焊接通常是人工手动完成的,这样的工作效率相对较低,且焊接成本较高,所以本发明公开了一种新型散热器高效焊接设备。
发明内容
发明目的:为了解决背景技术中存在的不足,所以本发明公开了一种新型散热器高效焊接设备。
技术方案:一种新型散热器高效焊接设备,包括支撑载台、夹紧组件、物料下放组件和焊接组件,所述夹紧组件包括数个夹紧驱动气缸和数个夹紧块,所述夹紧驱动气缸分设在支撑平台的前后两侧,且所述数个夹紧块对应与数个夹紧驱动气缸的伸缩轴固接,所述物料下放组件包括龙门机架和两个下放机械手,所述龙门机架的两个支腿分设在支撑载台的相对两侧,所述两个下放机械手对应设置在龙门机架的横梁底部,所述焊接组件包括两个机器人和两个激光焊接头,所述两个机器人分设在支撑载台的相对两侧,所述两个激光焊接头对应安装在两个机器人的执行端上。
作为本发明的一种优选方式,所述夹紧驱动气缸和夹紧块的数量均设置为四个。
作为本发明的一种优选方式,所述机器人具体采用六轴工业机器人。
作为本发明的一种优选方式,每个所述下放机械手包括升降驱动气缸和气动夹爪,所述升降驱动气缸对应设置在龙门机架的横梁下方,所述气动夹爪与升降驱动气缸的伸缩轴固接。
作为本发明的一种优选方式,每个所述气动夹爪的夹持面均贴附有防滑橡胶垫。
本发明实现以下有益效果:
本发明通过物料下方组件能将进水口和出水口下放在散热器表面,并利用机器人和激光焊接头结合对其进行焊接,工作效率较高,降低了焊接成本。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明公开的实施例,并于说明书一起用于解释本公开的原理。
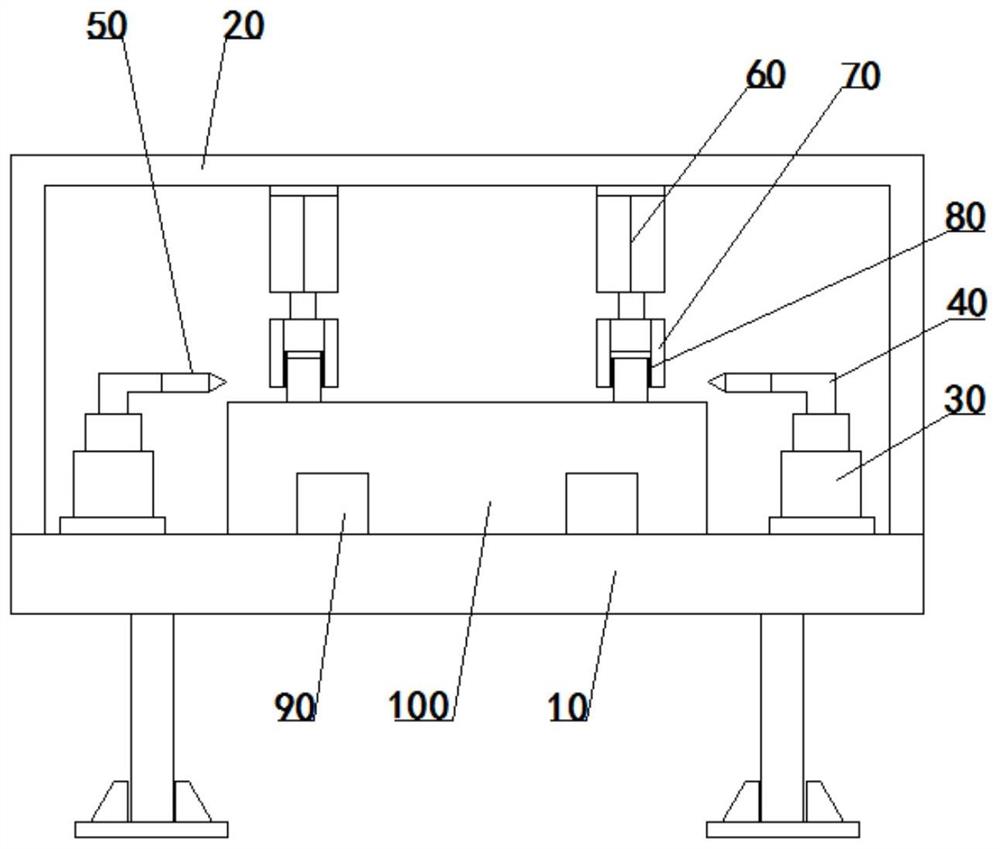
图1为本发明公开的整体结构示意图。
图2为本发明公开的夹紧驱动气缸和夹紧块连接结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参考图1-2,一种新型散热器高效焊接设备,包括支撑载台10、夹紧组件、物料下放组件和焊接组件,所述夹紧组件包括数个夹紧驱动气缸和数个夹紧块,所述夹紧驱动气缸分设在支撑平台的前后两侧,且所述数个夹紧块对应与数个夹紧驱动气缸的伸缩轴固接,所述物料下放组件包括龙门机架和两个下放机械手,所述龙门机架20的两个支腿分设在支撑载台的相对两侧,所述两个下放机械手对应设置在龙门机架的横梁底部,所述焊接组件包括两个机器人30和两个激光焊接头,所述两个机器人分设在支撑载台的相对两侧,所述两个激光焊接头50对应安装在两个机器人的执行端40上,在焊接时,两个机器人驱动两个激光焊接头对应将进水口和出水口焊接在散热器100上。
作为本发明的一种优选方式,所述夹紧驱动气缸90和夹紧块110的数量均设置为四个,且夹紧驱动气缸两两设置在支撑载台前后。
作为本发明的一种优选方式,所述机器人具体采用六轴工业机器人,具体结构为已知技术,在此不做赘述。
作为本发明的一种优选方式,每个所述下放机械手包括升降驱动气缸60和气动夹爪70,所述升降驱动气缸对应设置在龙门机架的横梁下方,所述气动夹爪与升降驱动气缸的伸缩轴固接,两个下放机械手对应抓取进水口和出水口,在具体操作时,每个升降驱动气缸对应驱动一气动夹爪动作,直至进水口下放到位并在焊接过程中保持夹紧状态,焊接结束后,两个气动夹爪方可停止对进水口和出水口夹紧,并且两个升降驱动气缸驱动两个气动夹爪复位。
作为本发明的一种优选方式,每个所述气动夹爪的夹持面均贴附有防滑橡胶垫80,这样能避免进水口或脱水口脱落。
上述实施例只为说明本发明的技术构思及特点,其目的是让熟悉该技术领域的技术人员能够了解本发明的内容并据以实施,并不能以此来限制本发明的保护范围。凡根据本发明精神实质所作出的等同变换或修饰,都应涵盖在本发明的保护范围之内。
- 一种新型散热器高效焊接设备
- 一种新型高效率计算机零件焊接设备