一种用于铸锻作业的装夹翻转装置
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及装夹装置技术领域,具体地说,涉及一种用于铸锻作业的装夹翻转装置。
背景技术
目前,对大规格的或者超大重量的重物锻造加工过程中,需要反复移动翻转物料,传统工艺为全劳动力移动翻转,当锻造和压铸过程中,铁块重达上百公斤时,也全部靠众多工人体力控制,这样浪费时间又增加成本,现在市场上已有机械手臂替代人工。目前的机械手臂也只能做到前后运送重物,不够灵活。
发明内容
为了解决上述现有技术的不足之处,本发明的目的在于提供一种用于铸锻作业的装夹翻转装置,以克服现有技术中的缺陷。
为了实现上述目的,本发明提供了一种用于铸锻作业的装夹翻转装置,所述装夹翻转装置包括张夹座总成、翻转座总成、回转机构总成和偏转座总成,其中,张夹座总成包括第一夹臂、第二夹臂、夹臂连接座、张夹油缸、同步杆和夹头;第一夹臂通过第一夹臂回转轴连接在两个夹臂连接座之间的前端一侧,第二夹臂通过第二夹臂回转轴连接在两个夹臂连接座之间的前端另一侧,第一夹臂的尾部与张夹油缸的缸筒一端连接,第二夹臂的尾部与张夹油缸的活塞杆一端连接,第一夹臂和第二夹臂的端部分别转动连接有相对设置的夹头,同步杆的一端连接在第一夹臂上,位于第一夹臂回转轴的外侧,同步杆的另一端连接在第二夹臂上,位于第二夹臂回转轴的内侧,以使同步杆倾斜连接在第一夹臂和第二夹臂之间,第一夹臂和第二夹臂在张夹油缸和同步杆的作用下实现夹取的动作;翻转座总成包括翻转座和翻转油缸;翻转座的前端通过前置转轴与张夹座总成的两个夹臂连接座的尾端中部连接,翻转座的尾端与回转机构总成连接,翻转油缸的缸筒一端连接在翻转座靠近尾端的一侧,翻转油缸的活塞杆一端连接在另一侧的张夹座总成的两个夹臂连接座上,以使翻转座总成通过翻转油缸顶住张夹座总成,使其绕着前置转轴摆动,实现张夹座总成形成在水平面上的摆动动作;回转机构总成包括回转座和回转马达;回转座的一侧与翻转座总成的翻转座的尾端转动连接,回转座的另一侧与偏转座总成固定连接,回转马达连接在回转座的另一侧,以使回转座在回转马达的作用下带动翻转座总成360度旋转;偏转座总成包括偏摆油缸、偏摆座和连接座;偏摆座通过偏摆轴连接在连接座的一侧,回转机构总成固定连接在偏摆座上,连接座的另一侧底部设置有一小连接座,偏摆油缸的缸筒一端连接在小连接座上,偏摆油缸的活塞杆一端连接在偏摆座上,以使偏摆油缸带动偏摆座绕偏摆轴运动,实现回转机构总成形成在垂直面上的上下摆动动作。
通过上述技术方案,能够代替人工的机械手臂,具有装夹作用,并可以实现上下摆动、360度旋转、水平摆动,用于装在叉车、电瓶车、装载机、挖掘机等工程机械上,实现把物体运输到工作场所并使物体处于合适的工作位置。
作为对本发明所述的用于铸锻作业的装夹翻转装置的进一步说明,优选地,所述装夹翻转装置还包括先导液压系统,先导液压系统包括分别连接在油箱与张夹油缸、翻转油缸、回转马达、偏摆油缸之间的先导控制油路,每一所述先导控制油路的进油口连接有先导控制阀,每一所述先导控制油路的出油口连接有多路换向阀,先导控制阀与所述油箱之间设置有先导泵,先导控制阀与先导手柄连接。
通过上述技术方案,利用先导液压系统和先导手柄的操作系统使得工作强度大大降低,提高效率。
作为对本发明所述的用于铸锻作业的装夹翻转装置的进一步说明,优选地,先导控制阀与多路换向阀之间的所述先导控制油路上设置有溢流阀,溢流阀与所述油箱连接。
通过上述技术方案,设置溢流阀用于调整先导控制油路内的压力。
作为对本发明所述的用于铸锻作业的装夹翻转装置的进一步说明,优选地,夹头通过活动销控制夹紧物件同心度。
通过上述技术方案,方便夹头夹紧物件。
作为对本发明所述的用于铸锻作业的装夹翻转装置的进一步说明,优选地,夹头内侧面呈弧形或V形,夹头的内侧面上设置有凸棱。
通过上述技术方案,夹头内侧面呈弧形或V形方便夹头装夹各种类型的物体,夹头的内侧面上设置有凸棱增加夹头与物体之间的摩擦力。
作为对本发明所述的用于铸锻作业的装夹翻转装置的进一步说明,优选地,回转座内设置有从动轮和主动轮,回转马达的输出轴与所述主动轮连接,所述主动轮与所述从动轮直接或间接传动连接,所述从动轮露出于回转座与翻转座总成的翻转座的尾端转动连接。
通过上述技术方案,方便回转机构总成与翻转座总成和偏转座总成有效连接。
本发明的有益效果如下:本发明的装夹翻转装置能够代替人工的机械手臂,具有装夹作用,并可以实现上下移动、360度旋转、水平摆动,用于装在叉车、电瓶车、装载机、挖掘机等工程机械上,实现把物体运输到工作场所并使物体处于合适的工作位置。
附图说明
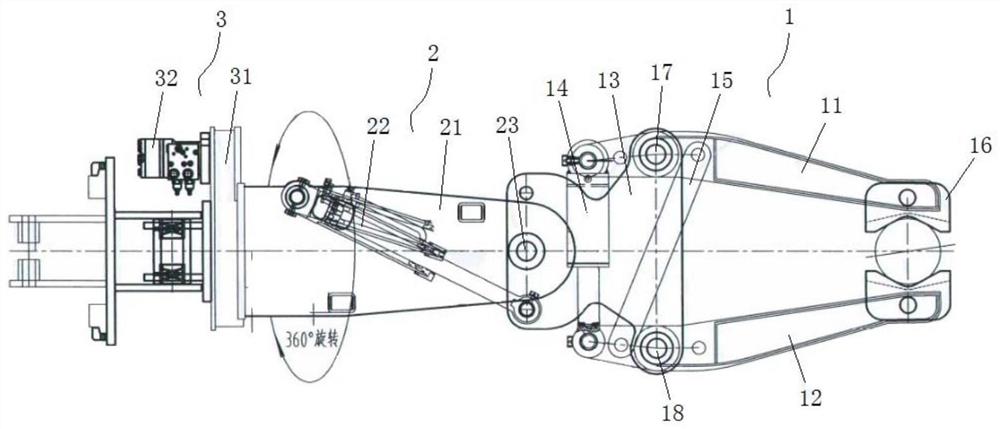
图1为本发明的用于铸锻作业的装夹翻转装置的结构示意图;
图2为本发明的张夹座总成的结构示意图;
图3为本发明的偏转座总成的结构示意图;
图4为本发明的先导液压系统的系统示意图。
具体实施方式
为了能够进一步了解本发明的结构、特征及其他目的,现结合所附较佳实施例附以附图详细说明如下,本附图所说明的实施例仅用于说明本发明的技术方案,并非限定本发明。
如图1所示,图1为本发明的用于铸锻作业的装夹翻转装置的结构示意图;一种用于铸锻作业的装夹翻转装置包括张夹座总成1、翻转座总成2、回转机构总成3和偏转座总成4。
请参看图1和图2,张夹座总成1包括第一夹臂11、第二夹臂12、夹臂连接座13、张夹油缸14、同步杆15和夹头16;第一夹臂11通过第一夹臂回转轴17连接在两个夹臂连接座13之间的前端一侧,第二夹臂12通过第二夹臂回转轴18连接在两个夹臂连接座13之间的前端另一侧,第一夹臂11可以绕第一夹臂回转轴17转动,第二夹臂12可以绕第二夹臂回转轴18转动;第一夹臂11的尾部与张夹油缸14的缸筒一端连接,第二夹臂12的尾部与张夹油缸14的活塞杆一端连接,第一夹臂11和第二夹臂12的端部分别转动连接有相对设置的夹头16,同步杆15的一端连接在第一夹臂11上,位于第一夹臂回转轴17的外侧,同步杆15的另一端连接在第二夹臂12上,位于第二夹臂回转轴18的内侧,以使同步杆15倾斜连接在第一夹臂11和第二夹臂之间,第一夹臂11和第二夹臂在张夹油缸14和同步杆15的作用下实现夹取的动作。当张夹油缸14的活塞杆收缩时,第二夹臂12的尾部向内侧运动,第二夹臂12的端部向外侧运动,通过同步杆15带动第一夹臂11的端部向外侧运动,实现两个夹臂同时打开的动作,当张夹油缸14的活塞杆伸出时,第二夹臂12的尾部向外侧运动,第二夹臂12的端部向内侧运动,通过同步杆15带动第一夹臂11的端部向内侧运动,实现两个夹臂同时夹取的动作。优选地,夹头16通过活动销控制夹紧物件同心度,方便夹头夹紧物件。更优选地,夹头16内侧面呈弧形或V形,方便夹头装夹各种类型的物体,夹头16的内侧面上设置有凸棱,以增加夹头与物体之间的摩擦力。
请参看图1,翻转座总成2包括翻转座21和翻转油缸22;翻转座21的前端通过前置转轴23与张夹座总成1的两个夹臂连接座13的尾端中部连接,翻转座21的尾端与回转机构总成3连接,翻转油缸22的缸筒一端连接在翻转座21靠近尾端的一侧,翻转油缸22的活塞杆一端连接在另一侧的张夹座总成1的两个夹臂连接座13上,以使翻转座总成2通过翻转油缸22顶住张夹座总成1,使其绕着前置转轴23摆动,实现张夹座总成1形成在水平面上的摆动动作。当翻转油缸22的活塞杆收缩或伸出时,夹紧机构1绕前置转轴23转动。
请参看图1,回转机构总成3包括回转座31和回转马达32;回转座31的一侧与翻转座总成2的翻转座21的尾端转动连接,回转座31的另一侧与偏转座总成4固定连接,回转马达32连接在回转座31的另一侧,以使回转座31在回转马达32的作用下带动翻转座总成2360度旋转。优选地,回转座31内设置有从动轮和主动轮,回转马达32的输出轴与所述主动轮连接,所述主动轮与所述从动轮直接或间接传动连接,所述从动轮露出于回转座31与翻转座总成2的翻转座21的尾端转动连接,方便回转机构总成与翻转座总成和偏转座总成有效连接。
请参看图3,偏转座总成4包括偏摆油缸41、偏摆座42和连接座43;偏摆座42通过偏摆轴44连接在连接座43的一侧,回转机构总成3固定连接在偏摆座42上,连接座43的另一侧底部设置有一小连接座45,偏摆油缸41的缸筒一端连接在小连接座45上,偏摆油缸41的活塞杆一端连接在偏摆座42上,以使偏摆油缸42带动偏摆座42绕偏摆轴45运动,实现回转机构总成3形成在垂直面上的上下摆动动作。当偏摆油缸41的活塞杆收缩或伸出时,偏摆座42绕偏摆轴45转动。其中,通过连接座44使所述装夹翻转装置与叉车、装载机或挖掘机连接。
请参看图4,所述装夹翻转装置还包括先导液压系统5,先导液压系统5包括分别连接在油箱与张夹油缸14、翻转油缸22、回转马达32、偏摆油缸41之间的先导控制油路,每一所述先导控制油路的进油口连接有先导控制阀51,每一所述先导控制油路的出油口连接有多路换向阀52,先导控制阀51与所述油箱之间设置有先导泵53,先导泵53用于将油箱里的压力油泵入先导控制油路,先导控制阀51与先导手柄54连接,由先导手柄54控制先导控制阀51打开,压力油进入先导控制油路流向多路换向阀52进入张夹油缸14、翻转油缸22、回转马达32和/或偏摆油缸41,先导手柄54还与多路换向阀52连接,通过先导手柄54的操作方向控制多路换向阀52使压力油流入或流出张夹油缸14、翻转油缸22、回转马达32和/或偏摆油缸41,进而实现装夹、上下移动、360度旋转、水平摆动的动作,先导控制阀51与多路换向阀52之间的所述先导控制油路上设置有溢流阀55,溢流阀55与所述油箱连接,在回油过程中由于先导控制油路内压力增大,溢流阀打开,以调整先导控制油路内的压力,压力油经溢流阀进入邮箱。利用先导液压系统和先导手柄的操作系统使得工作强度大大降低,提高效率。
本发明的用于铸锻作业的装夹翻转装置能够代替人工的机械手臂,具有装夹作用,并可以实现上下摆动、360度旋转、水平摆动,用于装在叉车、电瓶车、装载机、挖掘机等工程机械上,实现把物体运输到工作场所并使物体处于合适的工作位置。
需要声明的是,上述发明内容及具体实施方式意在证明本发明所提供技术方案的实际应用,不应解释为对本发明保护范围的限定。本领域技术人员在本发明的精神和原理内,当可作各种修改、等同替换或改进。本发明的保护范围以所附权利要求书为准。
- 一种用于铸锻作业的装夹翻转装置
- 一种用于铜板和夹片装夹作业的自动装配装置