活检器械、成套部件和方法
文献发布时间:2023-06-19 11:26:00
发明领域
本发明涉及活检器械(biopsy instrument)。
本发明还涉及成套部件(kit of parts)。
本发明还涉及获取活检的方法。
技术背景
活检是通常由医师来执行的医学检验,涉及细胞或组织的采样以用于检查。活检通常使用经由内窥镜插入患者身体内的活检器械来获取。如今各种各样的内窥镜活检器械是商业可获得的,其主体是夹断组织样本的活检钳,或者通过施加负压来吸出细胞的细针件。
对于一些诊断目的,使用钳可取回的毫米大小的样本是足够的,但对于一些类型的病变和肿瘤(例如相对深部的病变或深度生长的肿瘤),这样的小的且浅表的样本不足以做出诊断。细针件通常能够到达更深的肿瘤,但只能取回少量分散的细胞,从而限制了诊断能力。
当使用内窥镜活检器械来采集组织样本时,将器械插入内窥镜的工作通道中,并且推进至活检部位。在获得组织样本之后,内窥镜活检器械从内窥镜缩回,从而可以将组织样本放置在储存单元中,以供病理学家评估。
活检是目前用于确定肿瘤生长恶性程度的主要诊断工具。随着癌症治疗方法的改进和完善,诊断所需的活检次数也在增加。在能够确定最佳治疗方法之前,需要评估恶性细胞的扩散和密度,例如在喉癌或食道癌的诊断中可能需要20次-30次活检,这一过程耗时且对患者和医师二者都不方便。除此之外,钳通过撕裂将组织样本与患者身体分开,这有损坏组织样本的风险,并且使得评估活检更加困难。细针件提供少量的细胞,这些细胞不能通过常规的组织学方法获得,而且通常还需要更先进的超声内窥镜设备。
在这种情况下可以提到WO201166470,其公开了一种内窥镜活检器械,该内窥镜活检器械具有一种带有用于多次活检的储存腔的钳。通过使用在取回样本时施加的吸力,活检被向上输送到储存腔中。
有时使用的另一技术是提供一种针件,该针件具有封闭的远端,并且替代地在靠近远端的周向表面中具有开口。在这种针件中,使用吸力,该吸力将一部分组织吸入到周向表面中的开口中。在针件的内部设置往复运动的切割工具,该切割工具来回穿过开口并且切割周向表面内部的组织部分。这种技术的示例如在US20100152756和US20060074343中所示。
在WO200197702中公开了一种活检器械,其中外针件或插管被插入到组织中并且与病变部接触,由此在插管的近端处施加的连续吸力用于将病变部固定到插管的远端。在维持将病变部保持在适当位置的吸力的同时,第二医疗装置(例如活检针件或冷冻探针)穿过器械的近端处的不透空气密封件并穿过插管被插入至病变部。在US2013/0223702A1中,还公开了使用钳、螺旋钻或真空来将组织样本吸入到器械中的各种类型的活检器械。
上述公开技术的问题还在于它们依赖于吸力的应用,这使得器械变得复杂。
因此将会有利的是,具有一种活检器械,其允许直接且稳固的设计,并且该活检器械能够在短时间内取回足以用于诊断的量的组织样本。
发明概述
本发明的一个目的是提供一种活检器械,该活检器械允许直接且稳固的设计,并且该活检器械能够在短时间内取回足以用于诊断的量的组织样本。
这个目的通过一种活检器械来实现,该活检器械包括:
基部构件,其从近端沿着中心几何轴线延伸到远端,其中基部构件的至少远端部分被成形为长形的中空管,该远端旨在至少部分地插入到要从中获得活检的组织中,
其中基部构件能够沿着中心几何轴线传递力,使得近端沿着中心几何轴线的运动被传递成远端沿着中心几何轴线的运动,并且基部构件能够围绕中心几何轴线传递扭矩,使得由马达在近端处施加的围绕中心几何轴线的旋转和扭矩从近端被传递到远端,从而使远端围绕中心几何轴线旋转,
其中中空管设置有面向远侧的圆形切割刃(circular cutting edge),该圆形切割刃限定中空管的远端的嘴部,
其中中空管在中空管的远侧部分处具有长形中空管状的样本获取部分,该样本获取部分具有光滑的内表面,
其中该光滑的内表面的光滑程度使得在要获取参考活检时,中空管的切割刃和远端被构造成在受到在中空管的近端处的马达驱动而旋转的同时,沿着中心几何轴线推进到组织中,并且从而切割组织的芯,由于中空管的推进,组织的芯相对于中空管通过嘴部进入到中空管的样本获取部分,其中芯的外周向表面至少部分地邻接样本获取部分的光滑的内表面,此后,中空管在受到其近端处的马达驱动而旋转的同时从组织中缩回,由此组织的芯通过拉力与组织分离,该拉力由于中空管的缩回并且由于在光滑的内表面与芯的外周向表面之间的界面处形成的附着力而引起,该力将芯保持在具有光滑的内表面的样本获取部分内。当样本被拉回时,与旋转相结合的附着力使最远端处的样本产生旋转,从而实际上通过活检的旋转而产生的逐渐变细和扭转的螺旋线(thread)使样本与组织分离。
该活检器械与现有技术的活检器械相比的有利之处在于,该活检器械可以在相对短的时间内取回足以用于诊断的量的组织样本。活检器械能够一个接一个地直接取回多个组织样本,而先前的样本不需要被收获。当远端第二次推进到组织中时,第一样本以受控的方式被第二样本的芯朝向近端进一步推入到中空管中。中空管设置有光滑的内表面,该内表面的光滑程度使得由于光滑表面和组织中存在的液体,芯本身粘附性地粘附到中空管的内侧,这一事实可以在对样本损伤最小的情况下取回样本,并且仍然允许切割刃和远端钻入和钻出组织,从而减少患者的不适。当芯粘附到长形的管状构件的内侧时,芯将在长形的管状构件的嘴部处扭转并且与样本部位分离。与现有技术的活检器械相比,本发明的活检器械在器械内侧上不需要任何钩件或类似物(钩件具有的缺点在于其难以与钻入和钻出组织相结合),而且更避免损坏样本。事实是,本发明的活检器械对样本如此温和也允许以受控的方式收获样本,使得每个样本仍然是唯一可识别的并且仍然未受损。这允许医师保留由相应样本的体层和/或位置提供的任意信息,这些信息进而可以用于增加由活检提供的数据量,这进而可以提高最终提供的诊断的准确性。
可以注意到,在上面提到的是参考样本。当定义平滑度的参考时,使用对参考样本进行参考的概念,因为活检器械在实际的活检采样中可以根据多种不同的方法来使用。该活检器械可以例如根据一种方法来使用,在该方法中,参考如上文所述并且例如如图3-图5所示的、即远端被推进一段距离进入到组织中并且随后被缩回,来实际上使用活检器械。然而,根据另一方法,活检器械可以用于沿着组织的表面运动,从该表面获得活检,例如如图13a-图13b和图14a-图14c所示。在图3和图4所示的使用者方法中,远端完全被插入到组织中,也就是说,远端以整个周向部被插入到组织中的方式被插入,由此形成的附着力大于将芯从组织分离所需的断裂力。在图13a-图13b和图14a-图14c所示的方法中,远端仅部分地被插入到组织中,也就是说,远端仅以整个周向部的一部分被插入到组织中的方式被插入。表面的光滑度在这两种方法中都具有优点,但是当执行上述参考样本时,由光滑度提供的附着力通过芯与组织的剩余部分的分离而得到清楚的强调并且可观察到。可以注意到,参考样本指向在健康组织中执行的样本。
优选地,表面的光滑程度使得在使用上述类型的活检器械执行参考样本时,在远端已经插入组织中的距离等于或大于嘴部的内直径的情况下,芯在中空管缩回期间与组织分离。然而,在许多情况下优选的是,表面的光滑程度使得在使用上述类型的活检器械执行参考样本时,在远端已经插入到组织中的距离是嘴部的内直径的1倍、3倍或更大的情况下,芯在中空管缩回期间与组织分离。然而,在许多情况下更优选的是,表面的光滑程度使得在使用上述类型的活检器械执行参考样本时,在远端已经插入到组织中的距离是嘴部的内直径的至少1倍、7倍或更大的情况下,芯在中空管缩回期间与组织分离。以上内容至少对于内直径介于1mm-5mm之间适用。
优选地,中空管具有延伸部,并且沿着从远端朝向近端的长度设置有所述光滑表面,该延伸部具有的长度至少允许一个接一个地获取至少两个、优选至少三个上述公开类型的参考样本。
可以注意到,根据一个实施例,从弯曲的角度来看,基部构件可以是刚性的,并且与沿着直线延伸的中心几何轴线一起延伸。这种刚性的活检器械通常用作单独的活检器械。根据另一实施例,从弯曲的角度来看,基部构件是柔性的,由此其能够沿着中心几何轴线延伸,从而具有各种形状,这通常是用于内窥镜中的活检器械所需要的。这种用于内窥镜中的柔性的活检器械有时被称为内窥镜活检器械。
可以注意到,推进和缩回期间的旋转方向可以、但不必是相同的。例如,具有相同的旋转方向是有利的,例如对于基部构件在一个旋转方向上传递扭矩的能力与其在相反的旋转方向上传递扭矩相比更强的情况下。这种扭矩传递能力的差异可能发生在例如基部构件被设计成丝件(wire)的情况下,例如丝绳或中空丝绳。在一个旋转方向上,丝件的缠绕具有收紧的趋势,并且当传递扭矩具有使缠绕收紧的趋势时,丝件通常是相对强的。
优选的实施例出现在从属权利要求和说明书中。
优选地,光滑的内表面由聚合物基材料形成。聚合物基材料可以是通常所指的非粘性聚合物品级。使用非粘性品级的聚合物是有利的,因为这降低了第一组织样本与光滑表面之间的摩擦,并且有利于将第一组织样本进一步输送到长形的管状构件中。此外,通常被认为非粘性的表面通常足够光滑以提供所需的光滑度。聚合物基材料可以是例如乙烯四氟乙烯,TFE。也可以想到使用其他塑料材料,例如其他含氟聚合物。这种含氟聚合物可以是例如聚四氟乙烯PTFE、全氟烷氧基PFA、氟化乙烯丙烯,FEP。
可以注意到,聚合物基材料可以以各种不同的物理设计来提供。聚合物基材料可以以长形的管状构件的形式提供。聚合物基材料可以附接到外部构件的内侧。聚合物基材料可以设置在外部构件内,并且可以相对于外部构件运动和旋转。聚合物基材料可以作为外部构件内的涂层提供。下文将更加详细地讨论各种物理设计。
优选地,基部构件由从基部构件的近端延伸至远端的长形的中空管形成。如果将基部构件形成为从近端到远端完全地是长形的中空管,则例如有利于制造,这是因为基部构件的整个长度都可以以相同的方式设计。此外,这样的基部构件有利于收获,这是因为因此可以使用从近端穿过完整的活检器械延伸至远端的机械工具,使得样本可以被安全地推出。长形的中空管还允许利用近端处的空气喷射或注射流体将在远端处的样本推出来收获。这些方法要求长形管是足够不透空气性的,使得足够量的空气喷射实际上能够将样本推出。优选地,长形的中空管被设计成从近端延伸至远端具有均匀横截面;除此之外,该长形的中空管还在近端本身和/或远端本身处设置有以特定设计特征形式的局部不规则性。这些局部不规则性例如可以是中空管在近端处设置有连接器,和/或中空管在远端处专门设计成提供切割刃或专门设计成接收单独构件,该单独构件提供所述切割刃。
从弯曲的角度来看,基部构件优选是柔性的,使得基部构件能够被插入到内窥镜中并且与内窥镜一起使用。
优选地,长形的中空管包括长形的内中空管状构件,长形的内中空管状构件具有所述光滑的内表面。可以注意到,根据一个优选实施例,该长形的内中空管状构件可以相对于长形的外中空管状构件固定,并且根据另一优选实施例,该长形的内中空管状构件可以相对于长形的外中空管状构件运动。
优选地,长形的内中空管状构件由提供所述光滑的内表面的聚合物基材料形成。这是一种提供光滑的内表面的便利方式。
优选地,基部构件进一步包括长形的外中空管状构件。
优选地,长形的内中空管状构件被布置在长形的外中空管状构件内,并且根据第一实施例相对于长形的外中空管状构件可旋转地和可平移地固定。
优选地,基部构件包括中空金属丝绳,该中空金属丝绳能够沿着中心几何轴线传递力,使得近端沿着中心几何轴线的运动被传递成远端沿着中心几何轴线的运动,并且该中空金属丝绳能够围绕中心几何轴线传递扭矩,使得由马达在近端处施加的围绕中心几何轴线的旋转和扭矩从近端被传递到远端,从而使远端围绕中心几何轴线旋转。
优选地,长形的外中空管状构件包括所述中空金属丝绳。这种设计并不排他地、但对于长形的内中空管状构件相对于长形的外中空管状构件可旋转地和可平移地固定的设计是特别有用的。通过这种设计,可以使用相对标准化的部件;中空金属丝绳,并且随后通过添加长形的内中空管状构件提供活检器械的基部部件,该长形的内中空管状构件优选由聚合物基材料制成,从而提供光滑的内表面。
优选地,长形的内中空管状构件被布置在长形的外中空管状构件内,并且根据第二实施例相对于长形的外中空管状构件可旋转地和可平移地运动。这种设计的一个优点在于,在样本获取过程中,长形的外中空管状构件可以相对于内窥镜保持静止。在该第二实施例中,旨在将长形的内中空管状构件推进到组织中,而长形的外中空管状构件保持在组织外。通过将长形的外中空管状构件的远端定位在组织外,并且通过将长形的内中空管状构件的远端推进到组织中,有助于对插入深度的良好控制。长形的外中空管状构件在样本获取过程中可以相对于内窥镜保持静止的这一事实也可以为长形的外中空管状构件的远端提供止挡部,止挡部防止远端被无意地推进到组织中。此外,通过使长形的外中空管状构件在样本获取过程中可以相对于内窥镜保持静止,结合长形的内中空管状构件相对于长形的外中空管状构件可旋转地和可平移地运动,长形的外中空管状构件可以被设计成与内窥镜的工作通道相对紧密地配合。此外,由于在器械的为相互作用而专门设计和制造的两个部件之间提供相对运动,所以可以在长形的内中空管状构件与长形的外中空管状构件之间提供相对紧密的配合,并且仍然确保提供足够的游隙。此外,通过能够使用紧密配合,长形的内中空管状构件和长形的外中空管状构件将在某种意义上彼此支撑并防止彼此塌陷,这进而使得可以在长形的外中空管状构件和长形的内中空管状构件二者中使用相对薄的材料厚度。对于具有给定内直径的给定工作通道而言,这将进而使得长形的内中空管状构件的远端可以具有相对较大的内直径。第二实施例的其他优点和具体设计特征将在详细描述中结合附图进行更详细地讨论。
优选地,长形的内中空管状构件的旋转可运动性与平移可运动性无关,使得长形的内中空管状构件可以通过马达旋转,并且独立于旋转运动而来回地运动。
同样可以注意到,在该实施例中(其中长形的内中空管状构件被布置在长形的外中空管状构件内,并且相对于长形的外中空管状构件可旋转地和可平移地运动),基部构件根据一个实施例从弯曲的角度来看可以是刚性的,而根据另一实施例可以是柔性的。在刚性的实施例中,基部构件与沿着直线延伸的中心几何轴线一起延伸。这种刚性的活检器械通常用作单独的活检器械。在这样的实施例中,基部构件可以形成为具有可移除的内部探针的针件。刚性的活检器械允许经皮进入肿瘤。典型地,在这样的实施例中,长形的外中空管状构件是固定的,并且长形的内中空管状构件通过机动手柄旋转,并且在探针已经撤回之后推进到组织中。一旦刚性的内部探针被完全移除,则内中空管可以钻入到中空空间中,例如腹部、胸部、鼻窦或关节,并且用于插入其他器械,例如相机、用于流体或气体的注射装置或导丝/杆。根据该实施例(其中长形的内中空管状构件被布置在长形的外中空管状构件内,并且相对于长形的外中空管状构件可旋转地和可平移地运动)的另一实施例,基部构件从弯曲的角度来看是柔性的,由此该基部构件能够沿着中心几何轴线延伸,从而具有各种形状,这通常是用于内窥镜中的活检器械所需要的。这种用于内窥镜中的柔性的活检器械有时被称为内窥镜活检器械。
柔性内管可以用于插入柔性导丝,并且随后在导丝就位以待用于插入其他器械(例如支架和扩张球囊)的情况下被移除。
优选地,长形的内中空管状构件能够沿着中心几何轴线传递力,使得近端沿着中心几何轴线的运动被传递成远端沿着中心几何轴线的运动,并且该长形的内中空管状构件能够围绕中心几何轴线传递扭矩,使得由马达在近端处施加的围绕中心几何轴线的旋转和扭矩从近端被传递到远端,从而使远端围绕中心几何轴线旋转。
优选地,长形的内中空管状构件在其近端处具有用于连接到马达的连接器,该连接器能够沿着中心几何轴线传递所述运动以及所述旋转和扭矩。
优选地,长形的内中空管状构件在其远端处设置有所述面向远侧的圆形切割刃。
上述目的还通过成套部件来实现,该成套部件包括:
在其基本构型或任何优选实施例中公开的类型的活检器械,和
操纵单元,其包括马达,
其中活检器械在其近端处可以连接到马达,使得旋转和扭矩可以通过马达被施加到基部构件的近端,并且被传递到基部构件的远端。
上述目的还通过一种获取活检的方法来实现,该方法包括:
将活检器械的近端连接到具有马达的操纵单元,
将活检器械的远端运动到要获取组织样本的位置,
启动马达,从而将旋转传递到活检器械的远端,
在远端通过马达旋转的同时,将远端推进到要从中获得组织样本的组织中,该远端在基部构件的至少远端部分处被成形为长形的中空管,该长形的中空管具有面向远侧的圆形切割刃,该圆形切割刃限定中空管的远端的嘴部,从而切割组织的芯,由于中空管的推进,组织的芯相对于中空管通过嘴部进入到中空管的样本获取部分中,
在远端通过马达旋转的同时,将远端从组织中缩回,其中芯的外周向表面至少部分地邻接长形中空管状的样本获取部分的光滑的内表面,该样本获取部分被设置在中空管的远侧部分处,
由此组织的芯通过拉力与组织分离,该拉力由于中空管的缩回并且由于在光滑的内表面与芯的外周向表面之间的界面处形成的附着力而引起,该力将芯保持在具有光滑的内表面的样本获取部分内。
上述目的还通过一种活检器械来实现,该活检器械包括从近端沿着中心几何轴线延伸到远端的基部构件,其中基部构件的至少远端部分被成形为长形的中空管,该远端旨在至少部分地被插入到要从中获得活检的组织中,其中中空管设置有面向远侧的圆形切割刃,该圆形切割刃限定中空管的远端的嘴部,其中中空管在中空管的远侧部分处具有长形中空管状的样本获取部分,该样本获取部分具有光滑的内表面。
可以注意到,也可以想到,对于一些使用者场景,长形的内中空管状构件(刚性的或柔性的)可以在近端处手动地旋转,从而产生面向远侧的圆形切割刃。
附图简述
将参考示出了本发明的当前优选实施例的所附的示意性附图,以示例的方式对本发明进行更详细地描述。
图1示意性地公开了医师使用活检器械和内窥镜从患者获得组织样本。
图2更详细地公开了内窥镜的近端和活检器械的近端。
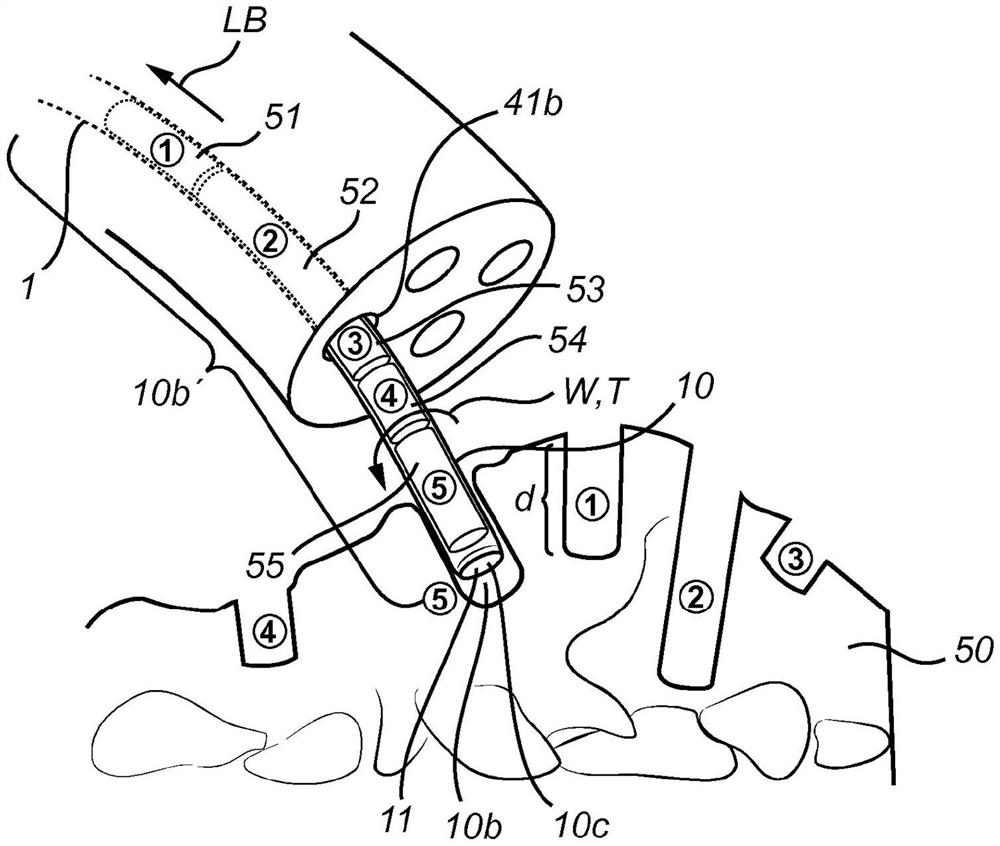
图3公开了内窥镜的远端和被推进到要获取样本的组织中的活检器械的远端。
图4公开了获取到若干样本之后的图3所示的内窥镜和器械。
图5示出了获取到若干样本之后的组织。
图6公开了从活检器械收获样本。
图7公开了使用由注射器提供的过压进行收获。
图8公开了被构造成附接到活检器械的近端的操纵构件的内部。
图9公开了图8的操纵构件的外部和操纵按钮。
图10公开了附接到活检器械的近端的操纵构件。
图11公开了柔性的活检器械。
图12是柔性的活检器械的更详细的截面图和分解图。
图13a-图13b公开了沿组织表面获取组织样本时活检器械的远端的第一位置和第二位置。
图14a公开了如从图13a-图13b的横截面图中看到的沿组织表面获取组织样本时活检器械的远端。
图14b公开了在表面中具有凹部的组织,该凹部由如图13a-图13b和图14a所示的活检器械形成。
图14c是图14b的组织和凹部的俯视平面图。
图15是根据第二实施例的活检器械的横截面图。
图16是图15的活检器械的又一截面图。
图17是公开了在内窥镜中使用的图15和图16的活检器械的示意图。
图18是公开了与图15-图17中相同类型的活检器械的示意图,该活检器械连接到马达与活检器械之间的伸缩功能件(telescope functionality)的变型。
图19更详细地公开了图18所示的伸缩功能件。
图20是图18和图19的伸缩功能件的截面图。
图21是图18-图20的伸缩功能件的分解图。
图22公开了马达、伸缩功能件和活检器械,并且示意性地公开了活检器械的被构造成连接到伸缩功能件的接口的示例。
图23公开了刚性的外中空针件和刚性的内中空针件,该刚性的内中空针件被构造成定位在刚性的外中空针件内。
图24公开了被插入到刚性的外中空针件中的刚性的内中空针件。
图25公开了刚性的内中空针件和刚性的内中空针件处于缩回位置的刚性的外中空针件,在该位置中,这些针件被构造成被操作并且被插入到手柄中,以便以样本获取方法来操作。
图26a公开了被定位在手柄中并且处于准备获取活检样本的状态的针件。
图26b示意性地公开了操作手柄来获取活检样本。
优选实施例的详细描述
在图1中,总体上公开了使用者U(例如医师)如何使用内窥镜40来引导活检器械1穿过患者P的体腔到达样本部位50。通过将内窥镜40穿过患者的体腔插入并且随着将活检器械1插入内窥镜40的工作通道41中,活检器械1被插入到患者身体内达到预期的样本部位50。如图1所示并且在图2中更详细地示出,内窥镜在患者身体外的剩余部分的近端处设置有入口开口41a,其中活检器械1旨在经由入口开口41a被插入到内窥镜中。内窥镜40通常设置有相机和/或超声波探头,并且通常经由处理单元45连接到屏幕44,该处理单元能够将来自相机或超声波探头的数据转换成屏幕44上的图像。
活检器械1包括基部构件10,该基部构件10从近端10a沿着中心几何轴线A延伸到远端10b。完整的活检器械1的一个实施例在图11中示出。在图11所示的实施例中,从弯曲的角度看,基部构件10是柔性的。因此,该基部构件能够沿着中心几何轴线A延伸,从而具有各种形状,这通常是用于内窥镜40中的活检器械10所需要的。在内窥镜40中使用的这种柔性的活检器械1有时被称为内窥镜活检器械1。然而,可以注意到,活检器械1对于不在内窥镜中使用的应用也是有用的。在这种情况下,从弯曲的角度来看,该活检器械可以是刚性的,并且与沿着直线延伸的中心几何轴线A一起延伸。这种刚性的活检器械通常用作单独的活检器械1。近端10a以其应用环境在图1和图2中示出,而远端10b以其应用环境例如在图3和图4中示出。
例如图3和图4所示,基部构件10的至少远端部分10b’成形为长形的中空管10。分别地在图12和图15-图16中详细示出的优选实施例中,基部构件10被成形为从基部构件10的近端10a延伸到远端10b的中空管10。
如图3和图4所示,被成形为长形的中空管10的远端10b旨在至少部分地被插入到要从中获得活检的组织50中。在图3和图4所示的使用者情况下,远端10b完全地被插入到组织中,也就是说,远端10b以整个周向部C插入到组织50中的方式被插入。在图13a-图13b和图14a-图14c所示的使用者情况下,远端10b仅部分地被插入到组织中,也就是说,远端10b仅以整个周向部C的一部分插入到组织50中的方式被插入。
基部构件10能够沿着中心几何轴线A传递力,使得近端10a沿着中心几何轴线A的运动LF、LB被传递成远端10b沿着中心几何轴线A的运动LF、LB。基部构件10也能够围绕中心几何轴线A传递扭矩,使得由马达31在近端10a处施加的围绕中心几何轴线A的旋转ω和扭矩T从近端10a被传递到远端10b,从而使远端10b围绕中心几何轴线A旋转。因此,通过推进和缩回近端10a以及通过在近端10a处施加旋转ω和扭矩T,基部构件10的远端10b是可操纵的。
活检器械1旨在根据参考图1的上文给出的简要公开来使用。下面参考图1和图2更详细地公开预期的使用方法。使用者U已经将活检器械10的近端10a连接到具有马达31的操纵单元30。通过使内窥镜40运动并且随后通过使活检器械1的远端10b相对于内窥镜40运动,活检器械1的远端10b被运动到要获取组织样本的位置。在该运动中,使用者U受到屏幕44上的图像的指引。此后,使用者U启动马达31,使得旋转被传递到活检器械1的远端10b。此后,在远端10b通过马达31旋转的同时,使用者U推进远端10b进入到要从中获得组织样本的组织50中,该远端10b在基部构件10的至少远端部分10b’处成形为长形的中空管10,该中空管10具有面向远侧的圆形切割刃11,该圆形切割刃11限定中空管10的远端10b的嘴部10c,从而切割组织50的芯51,由于中空管10的推进LF,该芯51相对于中空管10通过嘴部10c进入到中空管10的样本获取部分10b’中。这种推进可以说是活检器械10相对于内窥镜40在从近端10a延伸到远端10b的方向上运动。在图2的实施例中,该推进通过使操纵单元30相对于内窥镜40和入口开口41a沿着箭头LF向前运动来执行,使得活检器械10的自由距离I减小。一旦远端10b已经插入到组织50中达到预期深度d,随后,在远端10b通过马达31旋转的同时,使用者U将远端10b从组织50中缩回,其中芯51的外周向表面至少部分地邻接中空长形管状的样本获取部分10b’的光滑的内表面12,该样本获取部分10b’被设置在中空管10的远侧部分10b’处,由此组织50的芯51通过拉力与组织50分离,该拉力由于中空管10的缩回LB并且由于在光滑的内表面12与芯51的外周向表面之间的界面处形成的附着力而引起,该力将芯51保持在具有光滑的内表面12的样本获取部分10b’内。
例如,如图3和图4中示意性示出的以及图12和图16中更详细示出的,中空管10设置有面向远侧的圆形切割刃11,该圆形切割刃限定中空管10的远端10b的嘴部10c。在优选实施例中,当沿着嘴部11c的周向部C观察时,面向远侧的圆形切割刃11具有直线构型。还优选的是,嘴部11c限定平面,该平面具有的法线当中心几何轴线穿过嘴部11c的所述平面时平行于中心几何轴线A的延伸。也就是说,在最优选的实施例中,中空管10在嘴部11c处被正交于中空管10的纵向延伸的平面切割。
中空管10在中空管10的远侧部分10b’处具有长形中空管状的样本获取部分10b’,样本获取部分10b’具有光滑的内表面12。管状的样本获取部分10b’具有沿着中心几何轴线A的长度,该长度优选地足以允许多个样本51、52、53、54、55沿着中心几何轴线A一个接一个地被收集和定位在管状的样本获取部分10b’中。该长度优选地是中空管10的内直径D11ci的至少10倍,并且更优选地至少20倍。然而,如上文提到的,基部构件10优选地由从基部构件10的近端10a延伸至远端10b的长形的中空管10形成。因此可以说,长形中空管状的样本获取部分10b’基本上从远端10b一直形成到近端10a。
优选地,长形的中空管10被设计成从近端10a延伸至远端10b具有均匀横截面;除此之外,该中空管在近端10a本身和/或远端10b本身处设置有以特定设计特征的形式的局部不规则性。这些局部不规则性可以例如是中空管10在近端10a处设置有连接器15,和/或中空管10在远端10b处专门设计成提供切割刃11或专门设计成接收单独构件,该单独构件提供所述切割刃11。
光滑的内表面12的光滑程度使得在根据图3和图4所示获取参考活检时,中空管10的切割刃11和远端10b被构造成在中空管的近端10a处通过马达驱动而旋转ω、T的同时,沿着中心几何轴线A推进到组织50中,并且因此切割组织50的芯51,由于中空管10的推进LF,组织50的芯51相对于中空管10通过嘴部10c进入到中空管10的样本获取部分10b’中,其中芯51的外周向表面至少部分地邻接样本获取部分10b’的光滑的内表面12,此后,中空管10在受到中空管的近端10a处的马达驱动而旋转ω、T的同时,从组织50缩回,由此组织50的芯51通过拉力与组织50分离,该拉力由于中空管10的缩回LB并且由于在光滑的内表面12与芯51的外周向表面之间的界面处形成的附着力而引起,该力将芯51保持在具有光滑的内表面12的样本获取部分10b’内。优选地,表面12的光滑程度使得在使用上述类型的活检器械1执行参考样本时,在远端10b已经插入到组织50中的距离等于或大于嘴部10c的内直径D10ci的情况下,芯51在中空管10缩回期间与组织50分离。然而,在许多情况下可以接受的是,表面12的光滑程度使得在使用上述类型的活检器械1执行参考样本时,在远端10b已经插入到组织50中的距离是嘴部10c的内直径D10ci的1倍、3倍或更大的情况下,芯51在中空管10缩回期间与组织50分离。此外,在许多情况下可以接受的是,表面12的光滑程度使得在使用上述类型的活检器械1执行参考样本时,在远端10b已经插入到组织50中的距离是嘴部10c的内直径D10ci的1倍、7倍或更大,或者甚至2倍或更大的情况下,芯51在中空管10缩回期间与组织50分离。以上内容至少对于内直径D10ci介于1mm-5mm之间适用。
可以注意到,通常可以获得的最小或最浅表的样本通常取决于被采样的组织和肿瘤的类型。一般来说,更坚实的组织和肿瘤更容易采样,并且通常可以进行减小至1mm的活检。在粘膜中,也取决于从哪个器官取回活检,这是由于稠度也不同,例如相对较软的胃肠道与相对较坚实的呼吸道。在大多数类型的组织和肿瘤中,通常可以以高可重复性获得介于1mm-3mm之间的活检。
如图4所示,活检器械1能够一个接一个地直接取回多个组织样本,而先前的样本不需要被收获。当远端10b被推进到组织50中时,第一样本51以受控的方式被第二样本的芯52朝向近端10a进一步推入到中空管10中。中空管10设置有光滑的内表面12,该内表面12的光滑程度使得芯51自身粘附性地粘附到中空管10的内侧,这一事实可以在对样本51损伤最小的情况下取回样本,并且仍然允许切割刃11和远端10b钻入和钻出组织50,从而减少患者的不适。
中空管10是不透空气的。然而,应该注意的是,不透空气性并不意图解决任何长期的不透空气性或不透气体性问题,当涉及到气体的长期储存时通常会讨论这一点。中空管10应该是不透空气的,使得当中空管10缩回时,在中空管10的内侧壁与组织样本的芯51之间的界面处提供吸力。中空管10至少沿着管状的样本获取部分10b’沿中心几何轴线A的长度是不透空气的。管状的样本获取部分10b’优选地具有延伸部,并且沿着从远端10b朝向近端10a的长度10b’设置有所述光滑表面12,延伸部10b’具有的长度至少允许一个接一个地获取至少两个、优选至少三个上述公开类型的参考样本,每个参考样本具有的插入深度至少等于,或至少1倍、3倍于,或至少1倍、7倍于,或甚至2倍于内直径D10ci。在优选实施例中,中空管10沿着从近端10a到远端10b的整个长度是不透空气的。
如图6所示,样本51、52、53、54、55可以以受控的方式收获,使得每个样本51、52、53、54、55仍然是唯一可识别的并且仍然未受损。这允许医师保留由相应样本51、52、53、54、55的体层和/或位置提供的任意信息,这进而可以用于增加由活检提供的数据量,这进而可以提高最终提供的诊断的准确性。
收获可以例如通过使用由图6中箭头71示意性指示的机械工具来执行,该机械工具被插入并且从近端10a穿过完整的活检器械延伸到远端10b,使得样本51、52、53、54、55可以被安全地推出。如图7所示,长形的中空管10也允许在近端10a处使用空气喷射从而将在远端10b处的样本51、52、53、54、55推出来收获。后者将要求,长形管10的不透空气性足以使足够量的空气或其他种类的气体或液体流体喷射从而实际上将样本51、52、53、54、55推出。空气喷射可以例如由连接到中空管10的近端10a的注射器70提供。
优选地,光滑的内表面12由聚合物基材料12形成。聚合物基材料例如可以是乙烯四氟乙烯ETFE。也可以想到使用其他塑料材料,例如其他含氟聚合物,例如聚四氟乙烯PTFE、全氟烷氧基PFA、氟化乙烯丙烯FEP。
可以注意到,聚合物基材料12可以以各种不同的物理设计来提供。聚合物基材料12可以以长形的管状构件的形式提供。聚合物基材料12可以被附接到外部构件的内侧。聚合物基材料12可以被设置在外部构件内,并且相对于外部构件可运动和可旋转。聚合物基材料12可以作为外部构件内的涂层来提供。下文将更加详细地讨论各种物理设计。
两个具体实施例的共同点在于,长形的中空管10包括长形的内中空管状构件13,长形的内中空管状构件具有所述光滑的内表面12。可以注意到,根据一个优选实施例,该长形的内中空管状构件13相对于长形的外中空管状构件14固定,而根据另一优选实施例,该长形的内中空管状构件13相对于长形的外中空管状构件14可运动。在这两个具体实施例中,长形的内中空管状构件13由提供所述光滑的内表面12的聚合物基材料形成。
在图11中详细示出的实施例中,长形的内中空管状构件13被布置在长形的外中空管状构件14内,并且相对于长形的外中空管状构件14可旋转地和可平移地固定。
如图12所示,长形的外中空管状构件14包括中空金属丝绳,该中空金属丝绳能够沿着中心几何轴线A传递力,使得近端10a沿着中心几何轴线A的运动LF、LB被传递成远端10b沿着中心几何轴线A的运动LF、LB,并且该中空金属丝绳能够围绕中心几何轴线A传递扭矩,使得由马达31在近端10a处施加的围绕中心几何轴线A的旋转ω和扭矩T从近端10a被传递到远端10b,从而使远端10b围绕中心几何轴线A旋转。
例如,如图11和图12所示,中空管10在其近端13a处具有用于连接到马达31的连接器15,连接器15能够沿着中心几何轴线A传递所述运动LF、LB以及所述旋转ω和扭矩T。
中空管10还包括外层14’,该外层被布置在长形的外中空管状构件14外。外层14’例如可以是聚合物基收缩膜。
如图12所示,中空管10根据第一实施例设计,并且可选地也根据以下内容制造。
海波管16被安装到中空金属丝绳14的近端10b,该近端10b已经被接地。海波管16设置有尖锐的切割刃11。海波管16还具有在激光焊接过程中使用的开口16b,通过该开口将海波管16紧固到中空金属丝绳14的外部。基部连接器17被压接或收缩到中空金属丝绳14的近端10a上。基部连接器17进而被设计成连接到连接器15,其中连接器15被设计成连接到操纵单元30。在某种意义上,可以说基部连接器17形成连接器15的一部分。连接器15、17被制造成两个主要部分15、17,这是因为实际附接到中空金属丝绳14的部分17上具有小而直的设计是有利的。然后,由连接器15提供关于连接器15与操纵单元30之间的使用者友好连接的期望功能。基部连接器17与连接器15之间的连接使得其能够沿着中心几何轴线A传递所述力,并且能够围绕中心几何轴线A传递所述扭矩,使得所述旋转ω和所述扭矩T可以被传递。
长形的内中空管状构件13被定位在中空金属丝绳14内。长形的内中空管状构件13被焊接到中空金属丝绳14。当长形的内中空管状构件13被定位在中空金属丝绳14内时,长形的内中空管状构件13优选地具有与中空金属丝绳14的长度相比过长的长度,并且在该长形的内中空管状构件被平齐切割之前被焊接并固定在其适当位置。还可以提到的是,优选地,切割刃11c也与中空管10的远端10a齐平。由此光滑表面12将一直延伸到远端10a。
外收缩管14’收缩到中空金属丝绳14的外部。
参照图15和图16,下面将更详细地描述一个实施例,在该实施例中,长形的内中空管状构件13被布置在长形的外中空管状构件14内,并且相对于长形的外中空管状构件14可旋转地和可平移地运动。长形的外中空管状构件14旨在在样本获取过程中相对于内窥镜保持静止。长形的内中空管状构件13旨在旋转并且推进到组织50中,而长形的外中空管状构件14保持在组织50外。如图16所示,长形的外中空管状构件14的远端14b设置有止挡部19。止挡部19防止远端14b被无意地推进到组织50中。止挡部19被设计成增大长形的外中空管状构件14的远端14b与组织50之间的邻接表面。止挡部19提供这种增大的邻接表面,这是通过被定位在远端14b处并且被设计成提供一个或更多个增大远端14b的周向部的主体来实现的。止挡部19可以是附接到长形的外中空管状构件14的可膨胀环19。止挡部19可以是一个或更多个臂19’,其可枢转地连接到长形的外中空管状构件14。当长形的内中空管状构件13缩回时,由止挡部19提供的增大的邻接表面导致稳定性,并且作为反作用力工作,由此可以更容易地取出样本,而不会对样本部位周围的组织产生太大的拉力。此外,通过使长形的外中空管状构件14在样本获取过程期间可以相对于内窥镜保持静止,结合长形的内中空管状构件13相对于长形的外中空管状构件14可旋转地和可平移地运动,长形的外中空管状构件14可以被设计成与内窥镜的工作通道41相对紧密地配合。此外,由于在器械的为相互作用而专门设计和制造的两个部件之间提供相对运动,因此可以在长形的内中空管状构件13与长形的外中空管状构件14之间提供相对紧密的配合,并且仍然确保提供足够的游隙。此外,通过能够使用紧密配合,长形的内中空管状构件13和长形的外中空管状构件14将在某种意义上相互支撑并且防止彼此塌陷,这进而使得在长形的外中空管状构件14和长形的内中空管状构件13二者中使用相对薄的材料厚度成为可能。对于具有给定内直径的给定工作通道41而言,这将进而使得长形的内中空管状构件13的远端13b可以具有相对较大内直径D10ci。第二实施例的其他优点和具体设计特征将在详细描述中结合附图进行更详细地讨论。
长形的内中空管状构件13能够沿着中心几何轴线A传递力,使得近端10a沿着中心几何轴线A的运动LF、LB被传递成远端10b沿着中心几何轴线A的运动LF、LB,并且该长形的内中空管状构件能够围绕中心几何轴线A传递扭矩,使得由马达31在近端10a处施加的围绕中心几何轴线A的旋转ω和扭矩T从近端10a被传递到远端10b,从而使远端10b围绕中心几何轴线A旋转。
长形的内中空管状构件13在其近端13a处具有用于连接到马达31的连接器15,连接器15能够沿着中心几何轴线A传递所述运动LF、LB以及所述旋转ω和扭矩T。
长形的外中空管状构件14在其近端13a处具有用于连接到操纵单元30的连接器18,使得长形的外中空管状构件14可以运动到预期的样本部位,并且在长形的内中空管状构件13通过马达31旋转的同时,通过长形的内中空管状构件13的推进LF和缩回LB来获取样本期间保持静止。
长形的内中空管状构件13在其远端处设置有所述面向远侧的圆形切割刃11。切割刃11可以设置在单独构件上(例如类似于海波管16的海波管)。然而,由于长形的内中空管状构件13和长形的外中空管状构件14相互支撑并且因此可以设计成具有薄的材料厚度,可以想到使用长形的内中空管状构件13的切割远端,例如切割刃11。
操纵单元30简而言之包括壳体32、壳体32内的电动马达31、以及连接器33。连接器33被构造成与连接器15互连并且连接到马达31,使得扭矩T和旋转ω可以从马达31被传递到连接器15。操纵单元30还包括一个或更多个电池34a-34b。操纵单元30可以设置有一个或更多个按钮35a-35b。按钮35a-35b可以例如用于启动和停止马达31。操纵单元30可以设置有一个或更多个连接部,如连接部36示例性展示。连接部36可以例如用于提供至踏板37的接口,该踏板如图1所示,由此踏板37可以用于启动和停止马达31。使用者U可以例如被给予通过踩下/松开踏板37来改变旋转速度的选项。连接部36也可以用于给操纵单元30中的电池34a-34b充电。连接部36和壳体32可以被构造成接收从连接部36延伸的连接器80,连接器80如图8所示作为位于电线81的一端处的典型的连接器80的。连接部36和壳体32可以被构造成接收子壳体82,该子壳体82具有形成壳体32的延伸部分32’的形状和尺寸。该子壳体可以例如具有相同的周向部形状和尺寸,并且如图9和图10所示附接到壳体32的端部。电线81可以从壳体32的该部分32’延伸。壳体32的这种延伸部分32’可以容纳电池34a-34b。因此,电池34a-34b可以是可快速更换的,这些电池可以与包括马达31和连接器33的壳体部分分离地充电,并且可以使用具有马达31和连接器33以及多于一个延伸部分32的单个操纵单元30,每个延伸部分32设置有一组自己的所述一个或更多个电池34a-34b。
在图10中示出了操纵单元30如何通过连接到连接器33的连接器15被连接到活检器械1。
在图17中,示出了伸缩功能件90。伸缩功能件90可以包括罩盖件91,该罩盖件91至少部分地、但优选地完全地覆盖活检器械1的位于入口开口41a与操纵单元30之间的部分。伸缩功能件90可以具有沿轴线A可调节的长度,使得具有某种长度的活检器械1可以用于不同种类的内窥镜40中,该内窥镜40具有略微不同长度的工作通道41,如在入口开口41a与远侧开口41b之间测量的。伸缩功能件90也可以提供关于长形中空管状构件10的远端10b的最大延伸的限制和/或长形的外中空管状构件14的远端14b的最大延伸的限制。伸缩功能件90也可以设置有锁定构件92,一旦活检器械1已经运动到预期的样本部位,则长形的外中空管状构件14就可以通过锁定构件92相对于内窥镜40被固定。伸缩功能件90也可以设置有锁定构件或邻接构件93,通过该锁定构件或邻接构件93可以设定长形的内中空管状构件13与长形的外中空管状构件14之间的最大相对运动,由此可以提供明确限定的最大样本深度。可以注意到,在图17中,为了清楚起见,内窥镜40和活检器械1的远端被放大示出。然而,在实践中,活检器械1通常在远端部分10b’处具有与沿着活检器械的长度的其他部分的直径相同的直径,例如如图19所示。
图18-图22所示的伸缩功能件100特别被构造成用于图15-图16中所公开的类型的活检器械,即,具有非旋转的长形的外中空管状构件14和可旋转地布置在长形的外中空管状构件14内的长形的内中空管状构件13的活检器械。伸缩功能件100的近端连接到马达30,而伸缩功能件100的远端连接到内窥镜40。伸缩功能件100的不同部分连接到活检器械1的不同部分,这将在下面更详细地公开。
伸缩功能件100包括基部套筒110。基部套筒110在其远端处设置有连接器111,基部套筒110通过该连接器111被构造成连接到内窥镜40的插入开口41a。马达30被构造成连接到基部套筒110的近端。基部套筒110具有固定的长度。
伸缩功能件100还包括可滑动地布置在基部套筒110内的内部套筒120。内部套筒120连接到长形的外中空管状构件14,使得内部套筒120相对于基部套筒110在远侧方向上的滑动运动引起长形的外中空管状构件14相对于内窥镜在远侧方向上运动。伸缩功能件100还包括第一环形构件115,其围绕基部套筒110可运动地布置。第一环形构件115可以沿着基部套筒110来回滑动。可以说是控制长形的外中空管状构件14在内窥镜40的远端处的长度。第一环形构件115设置有连接器116,在所公开的实施例中,连接器116是螺钉和楔形件,通过该连接器116,第一环形构件115可以连接到内部套筒120。在所公开的实施例中,螺钉被定位在第一环形构件115的螺纹孔中,并且当螺钉拧入第一环形构件115的螺纹孔中时,该螺钉推动楔形件与内部套筒120接触,这可以被称为将长形的外中空管状构件14的长度调节成在远侧离开内窥镜。连接器116延伸穿过形成在基部套筒110的壁中的贯穿长孔112。通过使第一环形构件115相对于内部套筒120运动到期望的位置,并且在期望的位置处通过激活连接器116将第一环形构件115连接到内部套筒120,结合连接器116延伸穿过长孔112的事实,可以限定长形的外中空管状构件14可以从内窥镜40的远侧开口41a移出的程度。当连接到内部套筒120并延伸穿过长孔112的连接器116达到长孔112的远端时,连接器116以及因此第一环形构件115和内部套筒120被阻止相对于基部套筒110在远侧方向上的任何进一步运动。
伸缩功能件100还包括可滑动地布置在内部套筒120内的中心套筒130。中心套筒130连接到长形的内中空管状构件13,使得中心套筒130相对于内部套筒120在远侧方向上的滑动运动引起长形的内中空管状构件13相对于长形的外中空管状构件14在远侧方向上运动。长形的内中空管状构件13可在中心套筒130内旋转。在优选实施例中,长形的内中空管状构件13在孔131中延伸穿过中心套筒130,孔131所具有的直径使得孔131的内侧与长形的内中空管状构件13之间存在游隙。
伸缩功能件100还包括第二环形构件125,其围绕基部套筒110可运动地布置。第二环形构件125可以沿着基部套筒110来回滑动。第二环形构件125设置有连接器126,在所公开的实施例中,连接器126是螺钉和楔形件,通过该连接器126,第二环形构件125可以连接到中心套筒130。在所公开的实施例中,螺钉被定位在第二环形构件125的螺纹孔中,并且当螺钉拧入到第一环形构件115的螺纹孔中时,该螺钉推动楔形件与中心套筒130接触。连接器116延伸穿过形成在基部套筒110的壁中的贯通长孔113,并且穿过内部套筒120中的贯通长孔121。通过使第二环形构件125相对于中心套筒130运动到期望的位置,并且通过激活连接器126在期望的位置处将第二环形构件125连接到中心套筒130,结合连接器126延伸穿过内部套筒120中的长孔121的事实,可以限定长形的内中空管状构件13可以从长形的外中空管状构件14移出的程度。当连接到中心套筒130并延伸穿过长孔121的连接器126达到长孔121的远端时,连接器126并且因此第二环形构件125和中心套筒120也被阻止相对于内部套筒120在远侧方向上的任何进一步运动。
伸缩功能件100还包括连接器135,该连接器135被构造成在期望的相对位置处将中心套筒130和内部套筒120互连,如沿着中心套筒130相对于内部套筒120可滑动的方向所看到的。在公开的实施例中,连接器135在沿着所述滑动方向的固定位置处连接到中心套筒130。连接器135延伸穿过形成在内部套筒120的壁中的贯穿长孔122,使得连接器135可被使用者触及,并且使得中心套筒130可以相对于内部套筒120滑动,而连接器135不会阻止这种滑动运动。连接器136被构造成被激活并将内部套筒120与中心套筒130互连。在所公开的实施例中,连接器136被进一步拧入中心套筒130中的螺纹孔中,使得螺钉的头部在长孔122的侧面与内部套筒120的壁相互作用。
可以注意到,可以想到的是伸缩功能件100可以包括上面公开的并且例如如图18-图21所示的全套功能。然而,也可以想到的是,对于某些应用,期望的是只呈现上述功能中的一个或两个功能。
例如,可以想到的是,对于一些应用优选地可以调节长形的外中空管状构件14延伸出内窥镜40的远侧开口41b的最大长度,结合调节长形的内中空管状构件13可以从长形的外中空管状构件14移出的最大长度的可能性。如图3和图4所示,当需要进行活检时,这种设置通常会是有用的。
在替代实施例中,只有一种设置可用,即内部套筒120和中心套筒130互连的可能性。当需要执行如图13a-图13b所示的活检时,这种设置通常会是有用的。使用者将设置长形的内中空管状构件13延伸出长形的外中空管状构件14的固定距离,并且此后长形的内中空管状构件13和长形的外中空管状构件14将相对于内窥镜40的远侧开口41b一起运动,从而从器官壁的表面取得浅表样本,例如如图13a-图13b和图14a-图14c所示。
在上下文中也可以注意到,伸缩功能件90、100可以是单独的部件,即,独立于内窥镜40、活检器械1和马达30并且可连接到内窥镜40、活检器械1和马达30。可替代地,该伸缩功能件可以例如形成活检器械1的一部分,并且同样具有用于连接到马达30的接口,并且可选地也具有用于连接到内窥镜40的接口。
在图22中,示意性地示出了伸缩功能件100独立于活检器械1的设计。伸缩功能件100可以是马达30的一体式部分,但是可替代地也可以是可连接到马达30的单独的部件。活检器械1包括用于连接到伸缩功能件的接口。接口包括第一连接构件13e,该第一连接构件13e连接到长形的内中空管状构件13并且被构造成连接到伸缩功能件100的中心套筒130。接口包括第二连接构件14e,该第二连接构件14e连接到长形的外中空管状构件14并且被构造成连接到内部套筒120。
在实际活检采样中,活检器械1可以根据多种不同的方法来使用。该活检器械可以例如根据一种方法来使用,在该方法中活检器械如图3-图5所示来使用,即远端10b被推进到组织50中一段距离并且随后缩回。然而,根据另一方法,活检器械1可以用于沿着要从中获得活检的组织50的表面运动,例如如图13a-图13b和图14a-图14c所示。在图3和图4所示的使用者方法中,远端10b完全地被插入到组织50中,也就是说,远端10b以整个周向部C插入到组织50中的方式被插入,由此形成的附着力大于将芯从组织分离所需的断裂力。在图13a-图13b和图14a-图14c所示的方法中,远端10b仅部分地被插入到组织50中,也就是说,远端10b仅以整个周向部C的一部分插入到组织50中的方式被插入,如图14a所示。在图14a中,周向部C的大约一半(图14a中的下半部分)被插入到组织50中。如图13a-图13b所示,在该方法中,活检器械1沿着组织50的表面运动,并且在组织50的表面中切割出基本上连续的或者至少半连续的凹部57。
在图23和图24中,公开了活检器械1的变型,其中长形的外中空管状构件14是刚性的中空针件14。长形的内中空管状构件13也是刚性的中空针件13。如图23所示,刚性的内中空针件13被构造成定位在刚性的外中空针件14内。如图24所示,刚性的内中空针件13具有的长度足以使其能够延伸出刚性的外中空针件14的远侧开口。当操作刚性的内中空针件13和刚性的外中空针件14时,刚性的内中空针件13优选缩回,使得其不延伸出刚性的外中空针件14的远侧开口,如图25所示。在图25中,刚性的内中空针件13和刚性的外中空针件14将要被定位到操纵单元200中,该操纵单元200用于操纵刚性的内中空针件13和刚性的外中空针件14,以便获取活检。刚性的外中空针件14可以具有倾斜端,从而有利于刚性的外中空针件14插入到要采样的组织中。
此外,还可以想到在刚性的内中空针件13内设置内部探针。内部探针可以例如设置有对应于刚性的外中空针件14的尖端的倾斜实心尖端。当活检器械1被插入到要采样的组织中时,内部探针可以用于覆盖刚性的内中空针件13的嘴部,并且在所述刚性的内中空针件13旋转和/或插入到组织中之前内部探针可以被部分地或完全地取出。
这种具有内部探针的设计可根据以下内容使用:将活检器械1运动到达样本部位,例如穿过皮肤或经由体腔将活检器械1插入到组织中,其中内部探针被定位成使得其在活检器械1的该运动期间封闭刚性的内中空针件的嘴部。此后,内部探针在近侧方向上运动,使得刚性的内中空针件13的嘴部打开。内部探针在近侧方向上运动至少一段距离,该距离使得足以打开刚性的内中空针件13的远侧部分,该远侧部分具有足够的长度以允许足够量的组织被取回到刚性的内中空针件13中。此后,刚性的内中空针件13相对于刚性的外中空针件14在远侧方向上推进(并且同时地进行旋转)并且获取样本。此后,刚性的内中空针件13缩回到刚性的外中空针件14中,并且活检器械1从样本部位缩回。可以注意到,优选的是在刚性的内中空针件13推进之前,内部探针在近侧方向上运动,但是内部探针最迟在刚性的内中空针件13缩回到刚性的外中空针件14中的同时在近侧方向上运动就足够了,使得内部探针不会将刚性的内中空针件13内的样本推出刚性的内中空针件13。在活检器械1已经从样本部位移除之后,内部探针可以用于从刚性的内中空针件13收获样本,其方式为使内部探针在远侧方向上运动,使得内部探针将样本推出刚性的内中空针件13。内部探针可以是刚性的。内部探针可以是柔性的,并且由刚性的内中空针件引导。
可以注意到,内部探针的使用也可以适用于被构造成与内窥镜40一起使用的柔性的活检器械1。在这种情况下,内部探针也是柔性的,并且由长形的内中空管状构件13引导。
如图23所示,刚性的内中空针件13包括接口区段13e,并且刚性的外中空针件14也包括接口区段14e。
在图26a-图26b中示意性地示出了操纵单元200的示例,该操纵单元200适于使用图23和图24中公开的基本类型的活检器械1。
图26a公开了定位在操纵单元200中并处于准备获取活检样本的状态的针件。
图26b示意性地公开了操作操纵单元200的手柄210来获取活检样本。
更详细地,操纵单元200包括支撑操纵单元200的不同部件的基部构件201。操纵单元200包括支撑件202,该支撑件202被构造成与刚性的外中空针件14的接口区段14e相互作用,并且将刚性的外中空针件14保持在适当位置。优选地,刚性的外中空针件14相对于操纵单元200保持固定,即刚性的外中空针件14在纵向方向上不可运动,并且相对于操纵单元200不可旋转。
操纵单元200还包括被构造成与刚性的内中空针件13的接口区段13e相互作用的滑橇(sled)202。滑橇203还包括马达30,该马达30被构造成使刚性的内中空针件13相对于操纵单元200并且相对于刚性的外中空针件14旋转。滑橇203被构造成相对于支撑件201来回运动,使得刚性的内中空针件13的远端可以延伸出刚性的外中空针件14的远端,类似于图24所示,并且使得该刚性的内中空针件可以再次缩回从而刚性的内中空针件13的远端缩回到刚性的外中空针件14中,使得刚性的内中空针件13的远端不再延伸出刚性的外中空针件14的远端。这些插入和/或缩回的操作可以是手动的,或者可以是自动的,并且可以是由操纵单元200上的一个或更多个按钮电力控制的。
滑橇202可以例如通过连接到手柄205的连杆204以来回运动方式被操纵。通过相对于支撑件201操纵手柄205,滑橇202将经由连杆204受到影响。在优选实施例中,操纵单元200可以包括相对于支撑件201固定的第二手柄,并且图26a-图26b中所示的手柄205可以朝向这样的固定手柄运动。为了清楚起见,省略了这种固定手柄。
图23-图24的活检器械1被设计成定位在操纵单元200内,使得刚性的外中空针件14的接口14e与支撑件202相互作用,并且刚性的内针件13的接口13e与滑橇203和滑橇203上的马达30相互作用。操纵单元200被构造成此后被封闭,其方式为关闭刚性的内中空针件13和刚性的外中空针件14的接口区段13e和14e以及操纵单元200的相关联的部件202、203上方的盖206。例如,盖206可以相对于基部构件201铰接。该盖可以以其他合适的方式连接到基部构件201,例如可滑动地连接到基部构件201、使用卡扣连接或类似物可完全移除、等等。
操纵单元200设置有马达控制器,该马达控制器例如可以是由使用者操作的开关或按钮,或者可以是连接到滑橇202的操纵件的自动控制器,使得当使用者开始使滑橇202运动时,马达控制器启动马达30,使得刚性的内中空针件13开始旋转,使得其在整个样本获取过程旋转。
在已获取样本之后,刚性的内中空针件13缩回到刚性的外中空针件14中,并且使操纵单元200运动,使得刚性的内中空针件13和刚性的外中空针件14从被采样的组织中移出。
刚性的内中空针件13的接口区段13e可以设置有能够封闭刚性的内中空针件13的近端的柱塞或类似物。通过提供这种柱塞,在刚性的内中空针件13内空气被滞留在近端处的柱塞与远端处的组织之间,这些空气将形成气垫,从而防止过量的组织积聚在刚性的内中空针件13内。可替代地,这种柱塞可以由被定位在刚性的内中空针件13内的机械阻挡构件代替。这种机械阻挡构件优选地从刚性的内中空针件13的近端插入。机械阻挡构件可以、但并非必须提供与刚性的内中空针件13的内侧的不透空气的连接。可以注意到,这种提供空气柱塞或机械阻挡构件的情况不受限于图23至图26a-图26b所示的活检器械的设计。具有空气柱塞或机械阻挡构件的概念适用于所有公开的活检器械。
在插入过程中,阻挡构件可以被定位成使得其阻挡或封闭刚性的内中空针件13或长形的内中空管状构件13的嘴部。
还可以注意到,活检器械1的不同变型也可以用于额外的目的。无论长形的内中空管状构件13是刚性的还是柔性的,其都可以用作引入通道,以用于引入导丝。不管长形的外中空管状构件14是刚性的还是柔性的,其都可以用作引入通道,以用于引入导丝。导丝可以例如用于插入支架、气囊、相机、注射管或类似物。导丝也可以用于插入标记物,例如在X射线图像上可见的标记物。在这种情况下,活检器械1通常根据以下内容来使用:首先,将器械插入到组织中,并且可选地也获取样本;此后,可选地完全地取出长形中空管状构件13、14中的一个(如果已经获取到样本,则取出长形的内中空管状构件13,从而可以收获样本);此后,在活检器械1仍然被插入到预期位置时,经由活检器械1的一部分插入导丝;此后,在导丝保持延伸到预期位置的同时,缩回活检器械的所有部件;此后,插入或激活支架、球囊、标记物;并且最后导丝也被缩回。
- 活检器械、成套部件和方法
- 由单份量容器或单份量容器的成套部件制备饮料的方法、所述单份量容器以及所述成套部件