一种智能化家用宠物投食装置
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及宠物喂食技术领域,尤其涉及一种智能化家用宠物投食装置。
背景技术
以前宠物只是单指人们为了消除孤寂或出于娱乐目的而豢养的动物。现今宠物定义为,出于非经济目的而豢养的动植物。宠物是为了精神的目的而豢养的动植物。一般为了消除孤寂,或娱乐而豢养,以前的宠物一般是哺乳纲或鸟纲的动物,因为这些动物脑子比较发达,容易和人交流。如今,除了广为人知的活体宠物外,还有诸多的虚拟宠物。在所有动物类宠物中,普遍流行的主要为狗和猫,另外有鸟、鱼、虫、仓鼠、土拨鼠、刺猬、兔子等较为广泛。
由于现在的人们的工作都比较忙,无法准时、准点的对宠物进行喂食,在这期间难免忘记喂食,为此我们提出一种智能化家用宠物投食装置。
发明内容
本发明提出的一种智能化家用宠物投食装置,解决了主人不在家时无法对宠物进行投喂的问题。
为了实现上述目的,本发明采用了如下技术方案:
一种智能化家用宠物投食装置,包括底座,所述底座的顶部左侧滑动连接有喂食盒,所述喂食盒的右侧设有与底座的顶部焊接的支撑杆,所述支撑杆远离底座的一端焊接有储料箱,所述储料箱的底部左侧固定连接有红外传感器,所述红外传感器的右侧设有与储料箱的底部箱壁的转盒,所述转盒贯穿储料箱的底部箱壁,且转盒的右侧固定连接有转轴,所述转轴的外圈固定套接有两个轴承,位于右侧所述轴承远离转轴的一侧固定连接在支撑杆的左侧壳壁上,两个所述轴承的中间设有与转轴的外圈固定套接的第一皮带轮,所述第一皮带轮的下方设有第二皮带轮,所述第二皮带轮和第一皮带轮的外圈套接有皮带,且第二皮带轮靠近支撑杆的一侧固定连接有驱动电机,所述驱动电机远离第二皮带轮的一侧通过螺栓连接在支撑杆的左侧壳壁上。
优选的,所述底座的顶部左侧开设有滑槽,所述喂食盒的底部固定连接有滑块,所述滑块呈工字形,且滑块滑动连接在滑槽内,所述转盒的中心是镂空的,且转盒的顶部壳壁开设有通孔。
优选的,所述储料箱的顶部开设有进料口,所述进料口的内圈固定连接有进料斗,所述储料箱的底部开设有出料口,所述出料口的内圈固定套接有密封圈,所述密封圈的内圈固定套接在转盒的外圈上。
优选的,所述驱动电机的下方设有定时器,所述定时器固定连接在支撑杆的左侧壳壁上,所述定时器通过电缆与驱动电机连接,且定时器的型号为KG316T。
优选的,所述红外传感器通过线缆与定时器连接,所述红外传感器的型号为SYM18J-D50N1。
与现有的技术相比,本发明的有益效果是:本发明通过安装喂食盒、储料箱、红外传感器、转盒、转轴、轴承、固定块、第一皮带轮、第二皮带轮、皮带、驱动电机等结构,红外传感器通过定时器来控制驱动电机转动,驱动电机带动第二皮带轮转动,第二皮带轮通过皮带带动第一皮带轮转动,第一皮带轮带动转轴转动,转轴带动转盒转动,从而达到自动控制投料的目的,该装置结构简单设计新颖,方便对宠物自动喂食,从而使主人不在家时不会饿着宠物,以及减少了主人对宠物的喂食次数,由此减轻了主人的工作量,适合进行市场推广。
附图说明
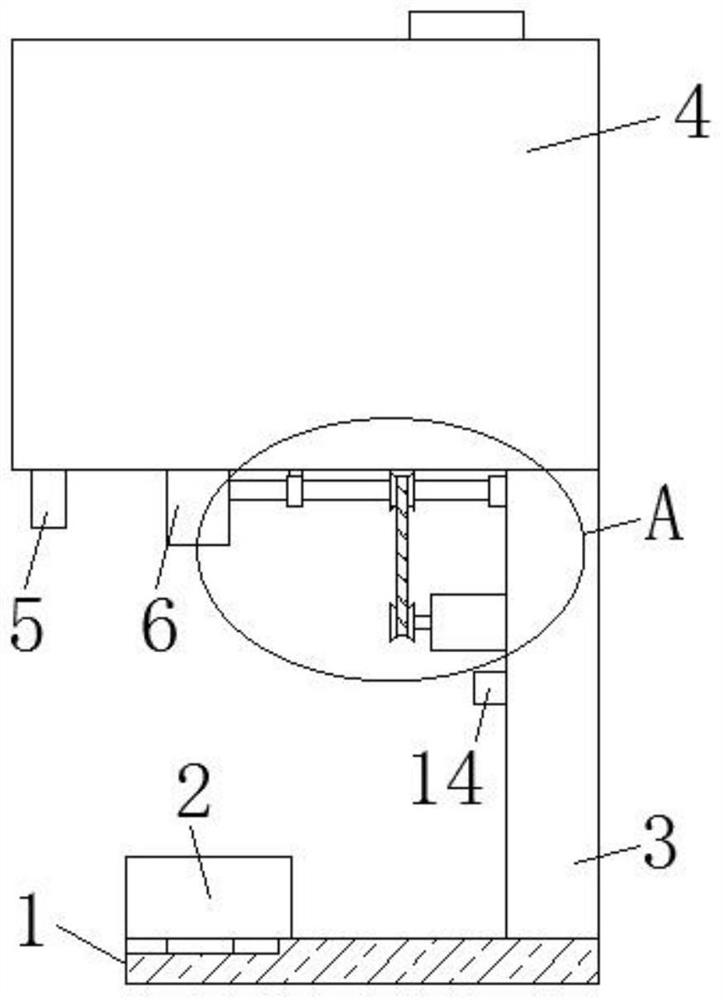
图1为本发明提出的一种智能化家用宠物投食装置的正视剖视结构示意图;
图2为本发明提出的一种智能化家用宠物投食装置的储料箱正视剖视结构示意图;
图3为本发明提出的一种智能化家用宠物投食装置的驱动电机和转轴放大结构示意图。
图中:1底座、2喂食盒、3支撑杆、4储料箱、5红外传感器、6转盒、7转轴、8轴承、9固定块、10第一皮带轮、11第二皮带轮、12皮带、13驱动电机、14定时器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1-3,一种智能化家用宠物投食装置,包括底座1,底座1的顶部左侧滑动连接有喂食盒2,喂食盒2的右侧设有与底座1的顶部焊接的支撑杆3,支撑杆3远离底座1的一端焊接有储料箱4,储料箱4的底部左侧固定连接有红外传感器5,红外传感器5的右侧设有与储料箱4的底部箱壁的转盒6,转盒6贯穿储料箱4的底部箱壁,且转盒6的右侧固定连接有转轴7,转轴7的外圈固定套接有两个轴承8,位于右侧轴承8远离转轴7的一侧固定连接在支撑杆3的左侧壳壁上,两个轴承8的中间设有与转轴7的外圈固定套接的第一皮带轮10,第一皮带轮10的下方设有第二皮带轮11,第二皮带轮11和第一皮带轮10的外圈套接有皮带12,且第二皮带轮11靠近支撑杆3的一侧固定连接有驱动电机13,驱动电机13远离第二皮带轮11的一侧通过螺栓连接在支撑杆3的左侧壳壁上。
底座1的顶部左侧开设有滑槽,喂食盒2的底部固定连接有滑块,滑块呈工字形,且滑块滑动连接在滑槽内,转盒6的中心是镂空的,且转盒6的顶部壳壁开设有通孔,储料箱4的顶部开设有进料口,进料口的内圈固定连接有进料斗,储料箱4的底部开设有出料口,出料口的内圈固定套接有密封圈,密封圈的内圈固定套接在转盒6的外圈上,驱动电机13的下方设有定时器14,定时器14固定连接在支撑杆3的左侧壳壁上,定时器14通过电缆与驱动电机13连接,且定时器14的型号为KG316T,红外传感器5通过线缆与定时器14连接,红外传感器5的型号为SYM18J-D50N1。
本实施例中,首先,因为红外传感器5通过线缆与定时器14连接,而定时器14通过电缆与驱动电机13连接,所以红外传感器5能够通过定时器14来控制驱动电机13转动,而驱动电机13的输出轴固定连接有第二皮带轮11,所以驱动电机13可以带动第二皮带轮11转动,由于第二皮带轮11和第一皮带轮10的外圈套接有皮带12,因此第二皮带轮11能够通过皮带12带动第一皮带轮10转动,而第一皮带轮10的内圈固定套接有转轴7,因此第一皮带轮10能够带动转轴7转动,因为转轴7的左端固定连接有转盒6,而转盒6贯穿储料箱4的底部箱壁,且转盒6的顶部壳壁开设有通孔,所以转轴7带动转盒6转动,由此实现了自动控制投料的功能。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种智能化家用宠物投食装置
- 一种家用宠物专用投食装置