基于雷达、视频、地磁的一体式交通检测系统
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及一种交通检测系统,属于交通检测技术领域,尤其是基于雷达、视频、地磁的一体式交通检测系统。
背景技术
技术在不断催生产品的变化,交通信号领域除了采用传统检测技术进行测速、测距,互联网企业的轨迹数据也开始成为信号优化的重要数据之一,但由于样本量、数据获取、服务开放性等问题,市场上目前还是以地磁、视频和雷达三种检测技术为主。
雷达检查的优势是可以对每个方向检测多车道的排队起始位置、排队长度、排队车辆数、平均车速和是否溢出等信息,同时检测多车道多个以上断面每辆车的车速、车型、车道号、占有时间等过车信息,可优化十字路口红绿灯的配时方案,动态调整交通信号控制机的各车道红绿灯设置时间,对于运动的车辆检测非常准确,其缺点是:对于静止和运动速度缓慢的车辆难以检测或者检测非常不准确,另外雷达对于车辆的长度并不能给出一个准确的值,而是通过一个大概车辆长度推算出占用时间等参数,并不是很准确。
视频检测的优点是资源丰富,应用范围广,首先是电子警察、卡口的过车记录信息,包含过车时间、身份标识、流量信息等,能够有效挖掘交通流的运行特征和车辆的个体特征等信息,其次是基于电警或卡口方式的视频流媒体二次分析,通过前端终端检测或者后台分析的方式,提取对应检测车道的车流量、车型大小、速度、占有率及排队长度等信息,终端用户通过交通监控中心的计算机了解该路口各方向在各个时间段通过的车流数据,包括交通流量、车型分类、车速、车头时距、时间占有率等,还可以在计算机上查询相关交通信息的图表,并随时查看路口交通监控的高清视频,直观地掌握交通信息的变化趋势。
视频检测也存在一些不可避免的问题,如监测的范围有限、受天气影响比较严重、对于车流量、距离很检测的准确必没有雷达有优势。
地磁检测器在埋设在城市主干道与其他重要路口,实现实时动态交通流数据的采集与处理,地磁检测方式主要的优势就是可以准确的感应出车辆的占有和离开,对占用时间、车流量等都非常准确,不管速度有多慢,天气有多恶劣。
地磁安装的缺点是:安装方式是限定的,只能做一个点的检测,也就是说需要检测几个流量断面就要安装几个地磁,没有雷达和视频方便,只看检测一个点或一个断面的车流量情况,不能准确的测出车型,车速排对长度等参数。
视频、雷达和地磁检测三者相较来看,视频检测的检测数据类型较全面,既可以获取数据,又能看到拥堵现状,但数据的准确度还有待提高,没有达到“鹰眼”技术,也容易受到雨雪天气的影响;地磁检测受天气干扰小,可以准确的感应出车辆的占有和离开,对占用时间、车流量等都非常准确,但是稳定性较差,偶尔会造成丢包现象,不能进行交通全局检测;雷达技术主要考虑的问题是在车速缓慢情况下准确度能达到多少,部分微波雷达不能测量静止车辆,雷达检测的数据稳定性强,精度较高,但是雷达使用成本较高,一般在预算充足的条件下适用。
发明内容
本发明目的是提供基于雷达、视频、地磁的一体式检测系统,实现路面交通信息的检测,为了实现上述目的,采用以下技术方案:包括:CPU单元、雷达模块、视频检测模块、地磁模块,所述视频检测模块用于检测车辆信息的数据识别,并与所述CPU单元数据交互;所述雷达模块用于对车辆目标的检测,并通过CAN接口与所述CPU单元通信;所述地磁模块用于检测车道占用数据,所述地磁模块与所述CPU单元数据连接;所述CPU单元用于数据汇总雷达、视频、地磁检测数据,并与信号机数据连接。
优选的,所述雷达模块包括雷达传感器、CAN芯片U8,雷达传感器RF前端与所述CAN芯片U8连接,CAN芯片U8与CPU单元通过RX、TX管脚实现数据的收发。
优选的,所述雷达模块还包括:六轴传感器U6、GPS接口JP4,GPS接口接5v直流电源,所述GPS接口JP4通过RX、TX管脚与CPU单元实现位置数据的交互;所述六轴传感器U6采用3.3v供电,所述六轴传感器U6通过SCL、SDA串行接口与CPU单元连接,实现数据的互传。
优选的,所述地磁模块包括:地磁传感器、RS485通信模块,所述地磁传感器用于检测地磁变化,且数据通过所述RS485通信模块与CPU单元连接,所述RS485通信模块包括收发芯片U10,所述CPU单元与所述收发芯片U10的RE管脚、DE管脚连接,用于输入收发芯片U10的接收或发出信号的控制指令;所述CPU单元与所述收发芯片U10的RO管脚、DI管脚连接,用于发出数据至CPU、或接收CPU的数据。
优选的,所述收发芯片U10的RE管脚、DE管脚与三极管开关Q2连接,所述CPU单元通过TX管脚输出电平信号,用于控制所述三极管开关Q2的通断和收发芯片U10的RE管脚、DE管脚的高低电平信号输入。
优选的,所述视频检测模块包括摄像头和视频网口电路,所述视频网口电路采用PHY芯片U13,所述PHY芯片U13与所述CPU单元通信,PHY芯片U13的收发信号线还与脉冲变压芯片T4连接。
优选的,所述CPU单元采用IMX6UL芯片。
优选的,所述CPU单元与所述信号机采用RS485通信、4G无线通信、RJ45通信的至少一种通信模块连接。
优选的,所述CPU与所述信号机之间还连接数据转换器,所述CPU单元通过RJ45通信线连接数据转换器,所述数据转换器与信号机IO接口连接。
优选的,还包括供电模块,供电模块通过电源接口JP1引入24v直流电源,所述供电模块包括:外围电路供电模块、4G供电模块、CPU供电模块和雷达供电模块。
优选的,还包括SD卡存储单元,所述SD卡存储单元与所述CPU单元连接,用于数据的存储、读取。
有益效果:
本专利申请集成了地磁、雷达、视频检测,通过CPU获取三个检测单元的检测数据,能够得到准确有效的车流量、速度、占有率、排队长度各种统计交通数据,并上传至信号机,为城市交通组织优化、交通基础设施规划建设提供重要设计依据。
附图说明
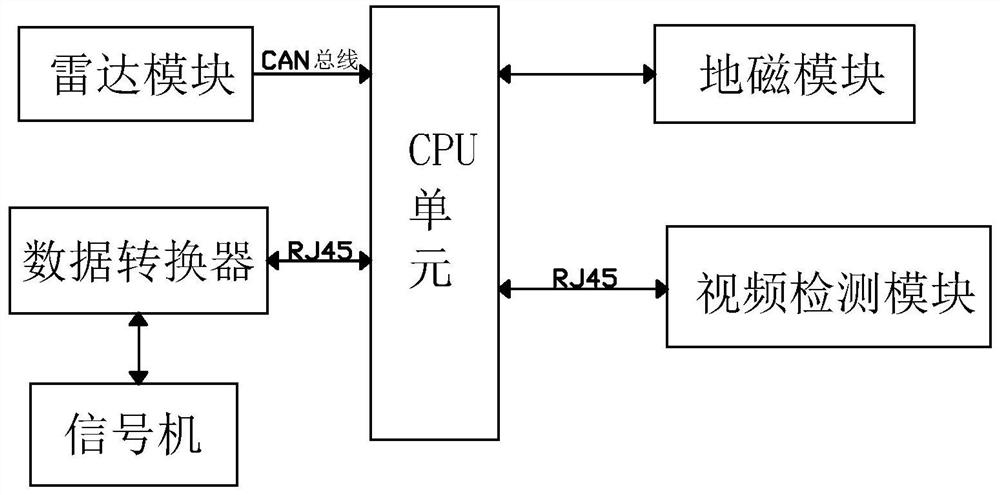
图1为本专利申请的系统框架示意图;
图2为CPU单元的芯片管脚图;
图3为供电模块的原理图,进一步的说为雷达、CPU单元的供电原理图;
图4为供电模块中关于外围电路的供电原理图;
图5为供电模块中关于4G网络模块供电的原理图;
图6为雷达接口电路;
图7为雷达模块中关于GPS模块的接口电路;
图8为雷达模块中关于六轴传感器的电路原理图;
图9为地磁模块中关于无线通信的电路原理图;
图10为视频检测模块中关于视频网口电路的原理图;
图11为4G网络的电路原理图;
图12为与4G网络电路连接的外设连接电路;
图13为主网口的电路原理图;
图14为RS485通信的电路原理图;
图15为SD卡存储模块的电路原理图;
图16为USB下载接口电路的原理图;
图17为复位电路以及BOOT电路的原理图。
具体实施方式
下面结合附图对本发明的具体实施方式作进一步的说明。
如图1所示,本专利集成了CPU单元、雷达模块、视频检测模块、地磁模块,视频检测模块用于检测车辆信息的数据识别,包括:可以包括车辆的形状、虚拟线圈的车流量、固定范围内的车牌识别等,视频检测模块与CPU单元数据交互;雷达模块用于对车辆目标的检测,并通过CAN接口与CPU单元通信,输出检测目标的径向距离、侧向距离、径向速度、侧向速度、目标ID、循环计数以及目标总数;地磁模块用于检测车道占用数据,进一步的说是地磁检测模块埋设于道路内,地磁接收机与地磁检测模块通过无线通信,且地磁接收机与CPU单元数据连接,将地磁的占用和空闲数据发送至CPU单元;CPU单元用于数据汇总雷达、视频、地磁检测数据,将上报的数据结合运算,得到可靠的交通数据,如流量,速度,占有率,排队长度各种统计交通数据,并与信号机数据连接。
图2所述,CPU单元采用IMX6UL芯片,采用5v供电电压,且与图15所示的SD卡存储单元连接,用于数据的存储、读取,还与图16所示的USB接口电路连接,可用于连接视频摄像头、手机、U盘等外设设备,并通过图17所示的复位电路、BOOT电路实现CPU单元的复位和重启。
还包括供电模块,供电模块通过电源接口JP1引入24v直流电源,供电模块包括:图4所示的外围电路供电模块、图5所示的4G供电模块、图3所示的CPU供电模块和雷达供电模块。
图3所示,CPU供电模块和雷达供电模块采用稳压器U3,24v电压接二极管D2阳极,二极管D2阴极接熔断器F1,熔断器F1的另一端接电感L7和电感L5,电感L7的另一端接雷达,用于雷达供电,且该电信号经过C32、C33两个并联的电容滤波;电感L5的另一端接地、稳压器U3的VIN管脚、电阻R10一端和电容C31一端,电阻R10的另一端接ENA管脚,电容C31的另一端接EP管脚,稳压器U3的VSENSE管脚经过电阻R13输出5v电压,用于CPU单元的供电,稳压器U3的BOOT管脚与PH管脚之间连接电容C24,且PH管脚接二极管D3阴极和电感L6,电感L6的另一端接经多组并联电容电路,经稳压器稳压、电容滤波后输出5v电压。
图4所示,外围电路供电模块采用降压转换芯片U1,该芯片选用TPS56220,降压转换芯片U1的VIN管脚输入5v电压,该电压信号经过电容并联电路滤波后经过电阻R1后输入至降压转换芯片U1的EN管脚,SW管脚经过电感L1滤波输出3.3v电压,且电感L1的两分别接电容C1、电阻R2,电容C1的另一端接降压转换芯片U1的VBST管脚,电阻R2的另一端接降压转换芯片U1的VFB管脚和电阻R4,电阻R4的另一端接降压转换芯片U1的GND管脚,该3.3v输出电压经过电容C3滤波,并通过发光二极管D1的亮灭指示电路的通断。
图5所示,4G供电模块采用降压转换芯片U2,该芯片选用TPS56220,降压转换芯片U2的VIN管脚输入经电容C15滤波好的5v电压,降压转换芯片U2的EN管脚接电阻R5、电阻R7,电阻R5的另一端接5v电压信号,降压转换芯片U2的VFB管脚接电阻R8和电阻R9一端,电阻R8的另一端接U2的GND管脚,电阻R9的另一端接电感L4,电感L4的另一端接SW管脚、电容C13,电容C13的另一端接U2的VBST管脚,电感L4的另一端接RC滤波电路后输出4G电路的供电电压。
图6所示,雷达模块包括雷达传感器、CAN芯片U8,CAN芯片U8采用TJA1051T,该芯片接5v供电电源、3.3v的IO供电电压,且通过CANH管脚、CANL管脚与雷达传感器RF前端连接,且通过电阻R20、电容C48构成的RC滤波电路进行滤波,CAN芯片U8通过RX、TX管脚与CPU单元实现数据的收发。
雷达模块还包括GPS接口JP4、六轴传感器U6,图7所示,GPS接口接5v直流电源,并通过电容C52滤波,该GPS接口JP4通过RX、TX管脚与CPU单元实现数据的交互,利用GPS配合雷达模块实现追踪、定位;且采用六轴传感器U6弥补GPS信号减弱时或无法即时发现车子速度和方向的改变的情况,图8所示,六轴传感器U6采用ICM20608芯片,该芯片的VDD管脚经电感L10接3.3v电源,VDDIO管脚经过电容C42接地,VDD管脚与VDDIO管脚短路,电感L10的两端分别接电容C41、电容C43一端,电容C41、电容C42的另一端接地;该芯片通过SCL、SDA串行接口与CPU单元连接,实现数据的互传。
地磁模块包括:地磁传感器、RS485通信模块,地磁传感器采用现有的地磁感应线圈,当金属车辆进入地磁传感器范围内,会引起磁场的变化,地磁接收器接收到数据的变化并通过RS485通信模块与CPU单元数据了连接,图9所示的RS485通信模块包括收发芯片U10,收发芯片U10采用SP3485芯片,采用3.3v电源电压供电;图9所示,CPU单元的TX管脚接电阻R36,电阻R36的另一端接开关三极管Q2的基极,开关三极管Q2的发射极接地、集电极经上拉电阻R32接3.3v电压,CPU单元控制开关三极管Q2的通断,开关三极管Q2的集电极还与收发芯片U10的RE管脚、DE管脚连接,用于输入收发芯片U10的接收或发出信号的控制指令;收发芯片U10的反向输入端B管脚和RO管脚与CPU单元的TX管脚连接,收发芯片U10的正向输出端A管脚和DI管脚与CPU单元的RX管脚连接,用于发出数据至CPU、或接收CPU的数据。
图10所示,视频检测模块包括摄像头和视频网口电路,视频网口电路采用PHY芯片U13,该芯片选用LAN8720型号,采用3.3v电源供电,且PHY芯片U13的RST管脚经过电阻R57接3.3v电压,3.3v的电压还分别通过电阻R55、电阻R56后输入RXER管脚、INT管脚,电阻R57的另一端接电容C76,电容C76的另一端接地以及电阻R58,电阻R58的另一端接RBLAS管脚;PHY芯片U13通过ENET管脚与CPU单元通信连接,PHY芯片U13的收发信号线还与脉冲变压芯片T4连接,该脉冲变压芯片T4采用HY601742。
CPU单元与信号机采用图14所示的RS485通信、图11所示的4G无线通信、图13所示的RJ45通信的至少一种通信模块连接,且与信号机连接接口是IO口时,则在CPU与信号机之间连接数据转换器,即:CPU单元通过RJ45通信线连接数据转换器,数据转换器与信号机IO接口连接。
图11、图12所示,4G无线通信电路采用EC20模块,EC20模块的VDD管脚接入1.8v电压,且VBAT管脚接入3.8v电压,作为VDD断电时的备用电压,EC20通过USB管脚与USB管脚通信连接,通过SIM管脚与SIM卡插槽X1实现与SIM卡U5的连接,且通过静电和闭锁保护芯片U7,用于保护数据线和I/O免受ESD的损坏,图中,SIM卡插槽X1采用MUP-C790,静电和闭锁保护芯片U7采用SMF05C,SIM卡U5采用MFF2类型的封装。
图13所示,RJ45通信电路采用PHY芯片U11,该芯片选用LAN8720型号,采用3.3v电源供电,PHY芯片U11的INT管脚经过电阻R48接3.3v电压,PHY芯片U11的RST管脚经过电阻R49接3.3v电压,PHY芯片U11的RST管脚还接电容C68,电容C68的另一端接电阻R50,电阻R50的另一端接RBLAS管脚;PHY芯片U11通过ENET管脚与CPU单元通信连接,PHY芯片U11的MDIO管脚和MDC管脚与CPU单元连接,且MDIO管脚接上拉电阻R41、MDC管脚接上拉电阻R42,PHY芯片U13的收发信号线还与脉冲变压芯片T3连接,该脉冲变压芯片T3采用HY601742。
图14所示,RS485通信电路包括开关三极管Q1、收发芯片U9,收发芯片U9采用SP3485芯片,采用3.3v电源电压供电;CPU单元的TX管脚接电阻R25,电阻R25的另一端接开关三极管Q1的基极,开关三极管Q1的发射极接地、集电极经上拉电阻R21接3.3v电压,CPU单元控制开关三极管Q1的通断,开关三极管Q1的集电极还与收发芯片U9的RE管脚、DE管脚连接,用于输入收发芯片U9的接收或发出信号的控制指令;收发芯片U9的RO管脚、DI管脚与CPU单元的TX管脚、RX管脚连接,实现数据的交互;收发芯片U9的VCC管脚还接电阻R23,电阻R23的另一端接收发芯片U9的A管脚以及电阻R24,电阻R24的另一端接收发芯片U9的B管脚和电阻R22,电阻R22的另一端接地,收发芯片U9的B管脚接TVS二极管T1的阴极,A管脚接TVS二极管T2的阴极,TVS二极管T1、T2的阳极接地,且A、B管脚接485接口。
本专利申请集成了地磁、雷达、视频检测,通过CPU获取三个检测单元的检测数据,能够得到准确有效的车流量、速度、占有率、排队长度各种统计交通数据,并上传至信号机,为城市交通组织优化、交通基础设施规划建设提供重要设计依据。
最后应说明的是:以上实施例仅用以说明而非限制本发明的技术方案,尽管参照上述实施例对本发明进行了详细说明,本领域的普通技术人员应当理解:依然可以对本发明进行修改或者等同替换,而不脱离本发明的精神和范围,而所附权利要求意在涵盖落入本发明精神和范围中的这些修改或者等同替换。
- 基于雷达、视频、地磁的一体式交通检测系统
- 一种基于毫米波雷达和视频的交通检测系统