一种地磁指纹定位并行计算方法
文献发布时间:2023-06-19 11:29:13
技术领域
本发明涉及计算机软件、并行数据算法以及室内定位技术领域,具体涉及一种应用在一种大型商业综合体地磁指纹定位并行算法的实现方法。
背景技术
传统的室内地磁场定位算法是室内地磁场指纹大数据中进行两两比对,是一种串行工作算法,当大量的智能手机同时发起定位请求时,在处理海量数据方面存在性能瓶颈。本发明中提出了一种新的基于Hadoop的MapReduce算法模型,该算法具有并行特征,可以视应用的需要通过引入多个计算节点,极大的提高计算性能;同时,在算法中实现了一种考虑定位精度的时空窗口计算功能,进一步的提高了检测速度,并提高了识别的精度。
本发明中提出了一种应用在一种大型商业综合体地磁指纹定位并行算法的实现方法。
在目前定位应用领域中,目前与本发明中所要解决问题相关的专利分析如下:
1、在专利号为CN201110047495,申请日期为2011.02.28,名称为“消防员现场导航装置”专利中,该申请提供了一种用于火灾现场的,可进行三维定位,并协助消防员迅速实施灭火救援行动的消防员现场导航装置,包括:中央控制模块、三维定位模块、外部存储模块、通讯模块、输入输出模块和保护外壳几个核心模块,通过这几个核心模块的协同工作,确定消防员在火灾现场的三维位置,并以清晰直观的语音或图像模式告知消防员,同时向消防员指示各种消防设施的方位,为消防员提供导航服务。该装置可以使每个消防员在火场中都如同增强了眼、耳的功能,同时该装置结合配套的指挥系统,使得指挥员能够更清晰直观的指挥灭火救援行动,这也就在一定程度上增强了消防员在火场中的战斗力和防护力,对提高消防部队的灭火救援能力有很大的帮助。其不足之处在于使用GPS定位技术无法在室内达到定位效果,定位精度极差。
2、在专利号为CN201110416874,申请日期为2011.12.14,名称为“一种利用室内无线定位技术的消防救援方法”,该申请公开了“一种利用室内无线定位技术的消防救援方法”,该发明涉及一种利用室内无线定位技术的消防救援方法。当发生火警时,每个受困人员利用手中的智能手机或保存在办公室内的配制移动终端,连通安装在大楼内的无线通信基站,通过智能手机或移动终端与无线通信基站之间的双向通讯来确定智能手机或移动终端的物理位置,然后将智能手机或移动终端的位置信息及身份信息通过无线通信基站接收并发送到监控主机,监控主机利用无线通信基站收集消防员的位置信息,监控主机同时收集布设在大楼中的所有烟雾传感器和防火门的传感器的信息,将相关信息发送到火场里的受困人员和救援人员手中。本发明的优点是受困人员和消防员对于火场形式双向透明,可以极大程度提高消防救援的成功率及受困人员的逃生机率。其不足之处在于未考虑失火大楼断电导致大楼内放置的通信基站无法使用的情况。
3、在专利号为CN201210580902,申请日期为2012.12.27,名称为“一种消防员室内外3D无缝定位及姿态检测系统及方法”专利中,该申请提供了一种消防员室内外3D无缝定位及姿态检测系统及方法,包括:一基于STM32单片机的主控制电路板,一基于Sim-900的GPRS数据传输模块,一GPS定位模块,一远程监控客户端以及惯性导航模块I和惯性导航模块II;主控制电路板通过串口分别与GPRS数据传输模块、GPS定位模块以及惯性导航模块I和惯性导航模块II相连;GPRS数据传输模块利用GPRS网络与绑定的远程监控客户端连接通信。本发明实现了消防员室内外3D无缝定位及姿态检测,可准确的对消防员的运动状态进行识别判断,同时可以实现对消防员的室内外3D无缝定位,针对消防人员的应用场合,系统可以扩展有毒气体传感器、烟雾、温度等传感器。其不足之处在于使用GPS定位技术无法在室内达到定位效果,定位精度极差。
4、在专利号为CN201220356804,申请日期为2012.07.20,名称为“一种智能头盔”专利中,该申请公开一种智能头盔,包括:射频标签装置、LED照明装置、微处理器、以及分别与微处理器连接的通信装置、传感器阵列模块、摄像装置、头盔显示器、麦克风、扬声器、GPS装置、存储装置以及电源装置。采用本实用新型的技术方案,可以实现对交警人员、公安警察、消防员以及井下采矿矿工的无线识别定位、装备跟踪,对交警人员、公安警察、消防员以及井下采矿矿工的周围环境和自身人体条件的检测、多媒体监控、无线通信、免提语音通信、实时定位以及投影显示的功能。其不足之处在于没有对消防员火场作战时的室内定位技术,对消防员的生命安全的保障不够全面。
在专利号为CN201420586359,申请日期为2014.10.11,名称为“消防员呼救通讯头盔”专利中,该申请提供了一个消防员呼救通讯头盔,解决现有消防头盔不具备呼救功能,使用不方便和不易被发现的问题,包括:头盔体、语音通讯主板、呼救模块、方位信号灯和防爆电池,所述语音通讯主板与呼救模块联接,呼救模块与方位信号灯联接,防爆电池依次与语音通讯主板、呼救模块和方位信号灯联接;本实用新型结构新颖独特,消防员呼救通讯头盔具有语音通话、及时呼救和快速定位的功能,使用方便。其不足之处在于使用的通讯技术与传统的对讲机使用的技术及频段相同,通信信号极易受高温浓烟的影响,导致信号不稳定,消防员的生命安全依旧得不到保障。
5、在专利号为CN201510241697,申请日期为2015.05.13,名称为“消防员智能战斗头盔”专利中,该申请提供消防员智能战斗头盔,解决了抗干扰能力差、操作复杂和佩戴不便的问题,包括:头盔,所述头盔采用新型复合材料一体化模压成型;所述头盔左侧安装有电路板和开关,头盔右侧安装有防爆电源,头盔的顶部安装有骨传导装置,头盔内部有连接线,用来连接电路板、开关、防爆电源和骨传导装置;头盔重量减轻60%,坚硬度增加;智能战斗头盔集群呼、收听、对讲、调频和视频多种功能为一体,穿戴方便,操作简便;利用骨振动传声技术有效的利用消防员说话时,头骨的振动来替代传统利用声音高低频率传送的传话器,抗干扰性强;可将火灾现场情况及时反馈到指挥中心,从而指挥中心可及时有效的做出应对突变救灾方案。其不足之处在于使用的通讯技术与传统的对讲机使用的技术及频段相同,通信信号极易受高温浓烟的影响,导致信号不稳定。
6、在专利号为CN204374427U,申请日期为2015.01.30,名称为“一种基于复合定位系统的消防员室内定位装置”专利中,该申请提供了一种基于复合定位系统的消防员室内定位装置,包括:中央处理模块、卫星收发模块、基站收发模块、wifi收发模块、高度传感模块、存储模块及电源模块:所述中央处理模块分别与所述电源模块及所述存储模块联接;所述卫星收发模块、基站收发模块、wifi收发模块及高度传感模块分别与所述中央处理模块联接。本实用新型通过获取定位系统内各模块的定位信息进行综合分析处理,在消防员进入室内扑救时能够实时精准的定位到其位置;同时卫星定位信息的各维度的数据以毫秒为单位进行有效存储,使得外部的数据服务中心能够实时的监测到消防员在室内扑救工作的轨迹。其不足之处在于在浓烟环境下GPRS无法使用时,采用WIFI模块回传数据,其没有考虑到火场断电情况,一旦断电WIFI将无法接入网络,则无法将数据回传。
本发明针对传统的室内地磁定位串行处理算法的不足,并提出了一种适用于智能手机的基于MapReduce模型的室内地磁信号并行算法,与传统算法相比具有算法结构更加简单,性能更高的优点,可以有效的解决海量地磁定位计算的瓶颈问题。
发明内容
为了解决上述技术问题,本发明是通过以下技术方案实现的:
1.首先是定义移动端地磁信号的特征
智能手机地磁信号数据流具有如下特性.(i)事件驱动,(ii)非间断性,(iii)无限体积。设a
2.对室内地磁定位的流程进行定义
基于移动端进行室内地磁定位时,需要提前采集地磁指纹,并按层、区域、房间和组距进行组织。在定位时,手持带霍尔传感器的智能手机在室内行走,此时智能手机会自动的采集地磁数据,上传到服务器进行匹配,完成匹配后会将匹配结果发回到所持的智能手机。
3.设计室内地磁定位MapReduce并行算法模型
本发明提出的室内地磁定位MapReduce算法的核心分为两个部分构成,分别为映射算法和归约算法,由于是并行算法,它们可以被安排在不同的硬件计算资源上分别进行计算。
3.1.实现映射算法
建立映射模型是室内地磁定位算法中较为关键的一步,映射模型的目的是筛选掉不符合条件的数据,把得到的KEY/VALUE数据传递给归约模型,归约模型将映射模型得到的KEY/VALUE数据按KEY合并、排序、处理。
映射模型即MepReduce中的Map阶段,在室内地磁定位中Map过程是将存储于HDFS中的原始数据映射为只有时间序列特征、频率特征和能量域特征的数据。
3.2.实现归约算法
归约模型获取到Map的中间数据将智能手机UUID作为KEY值然后统计同一手机在最大概率指纹区域出现的概率为VALUE,如果Value大于某个阈值,将该指纹所对应的位置ID输出。
附图说明
本发明的专利申请,其说明书包括四幅附图,这些附图的图面说明如下:
图1是Map算法模型的示意图
图2是归约算法模型的示意图
图3是室内地磁定位并行算法框架图
具体实施方式
1.为了执行Map算法,本发明中室内地磁信息采集的流程如下:
由于智能手机地磁信号数据流具有如下特性.(i)事件驱动,(ii)非间断性,(iii)无限体积。设a
由于室内地磁定位数据是按时空存储,本发明中定义了一个滑动时空窗口,为{O
对于服务器端而言,同一部智能手机,不可能出现在两个或两个以上的位置,因此,在本发明中定义了一个最小旅行时间,任意取一个时间T′,如果T′≤T
当选定地磁定位用的数据S
2.如图1所示,本发明的Map算法采用如下方法:
在本发明中,为室内地磁定位算法建立映射模型,映射模型的目的是筛选掉不符合条件的数据,把得到的KEY/VALUE数据传递给归约模型,归约模型将映射模型得到的KEY/VALUE数据按KEY合并、排序、处理。
映射模型是本发明MapReduce中的Map阶段,在室内地磁定位中Map过程是将存储于HDFS中的原始数据映射为只有时间序列特征、频率特征和能量域特征的数据。
3.如图2所示,本发明的Reduce算法采用如下方法:
在本发明中,将归约模型获取到的Map中间数据,将智能手机UUID作为KEY值,然后统计同一手机在最大概率指纹区域出现的概率为VALUE,如果Value大于某个阈值,将该指纹所对应的位置ID输出,其算法模型如图2所示。
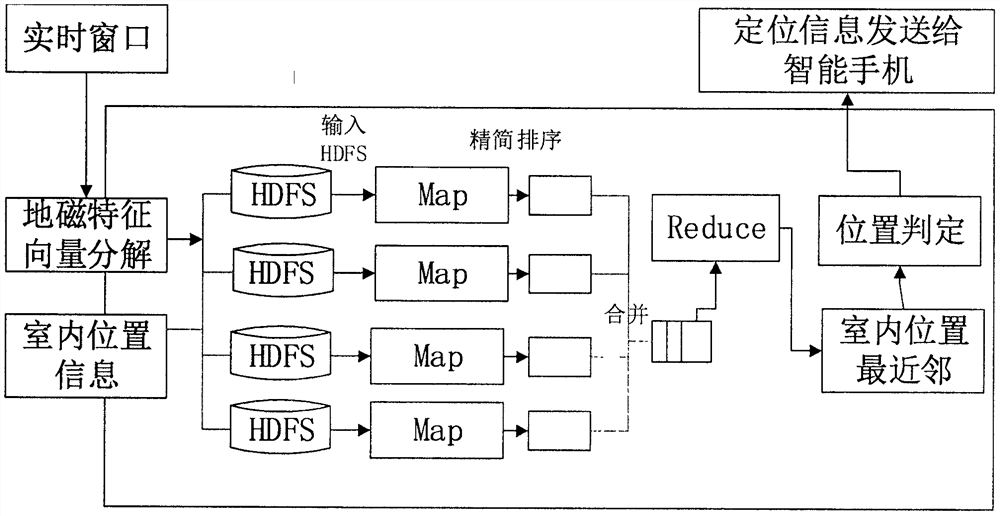
4.如图3是室内地磁定位并行算法框架图,在本发明中采用如下方法实现:
首先通过室内地磁信号检测系统获取实验对象的室内地磁信号指纹信息,经自动校时和特征分解以后,同路径信息一并存储到HDFS;接下来利用本文的窗口算法信息确定时间窗口并构建数据文件的映射模型和归约模型;最后利用归约结果实现智能手机的指纹位置的识别。
高层与地下大型商业中的室内地磁指纹的数量级一般在,当大量的智能手机同时发起定位请求时,视时空窗口的定义,每个间隔会上传一次实时的地磁信号,并发量巨大,因此在本发明中提出的算法比传统的串行算法在同级别的数据量时定位效率会有极大的提升,在本发明中算法中增加计算节点时,计算效率会大幅提升。当设定好定位成功所要求的概率阈值时,接近阈值的视为定位成功,并标记为1。
- 一种地磁指纹定位并行计算方法
- 一种基于地磁指纹匹配算法的室内定位方法