一种基于BIM的城市轨道施工设备
文献发布时间:2023-06-19 11:29:13
技术领域
本发明涉及轨道施工技术领域,特别是涉及一种基于BIM的城市轨道施工设备。
背景技术
建筑信息模型(Building Information Modeling,简称BIM)是广泛应用于是建筑学、工程学及土木工程的计算机工具,BIM的核心是通过建立虚拟的建筑工程三维模型,利用数字化技术,为这个模型提供完整的、与实际情况一致的建筑工程信息库,即实现数字技术对工程系统的管理。借助这个包含建筑工程信息的三维模型,大大提高了建筑工程的信息集成化程度,使工程技术人员对各种建筑信息做出正确理解和高效应对,为设计团队以及包括建筑、运营单位在内的各方建设主体提供协同工作的基础,在提高生产效率、节约成本和缩短工期方面发挥重要作用。
城市轨道施工过程包括:铺轨前准备工作、城市轨道施工、碎石道床轨道铺设和道岔铺设施工等项目。如图1所示,在施工过程,常需要对所铺设的轨道10进行安装或者检修,施工人员需要带着沉重的作业工具沿着轨道一路前行并完成作业,如此便增加了施工人员的施工难度。这就需要一种可以协助施工人员运输作业工具的施工设备,来减轻施工人员的工作负担。同时,还希望该施工设备具有保管作业工具的能力,可以防止无关人员对作业工具的取用。
为此,如何设计一种基于BIM的城市轨道施工设备,既可以减轻施工人员的工作负担,又可以防止无关人员对作业工具的取用,这是该领域技术人员需要解决的技术问题。
发明内容
本发明的目的是克服现有技术中的不足之处,提供一种基于BIM的城市轨道施工设备,既可以减轻施工人员的工作负担,又可以防止无关人员对作业工具的取用。
本发明的目的是通过以下技术方案来实现的:
一种基于BIM的城市轨道施工设备,包括无限延伸的平行导轨、移动储物箱以及储物机械锁;
所述移动储物箱包括箱门及箱体本体,所述箱体本体滑动设于所述平行导轨上,所述储物机械锁安装于所述箱门上。
在其中一个实施例中,所述储物机械锁包括:锁体基座、锁销、上锁偏摆件、解锁偏摆件以及弹性连接组件;
所述锁体基座安装于所述箱门上,所述锁销滑动设于所述锁体基座上,所述上锁偏摆件与所述解锁偏摆件转动设于所述锁体基座上,所述上锁偏摆件通过所述弹性连接组件与所述解锁偏摆件驱动连接,所述锁销上设有驱动齿,所述上锁偏摆件上设有与所述锁销啮合的扇形齿轮;
所述上锁偏摆件具有:上锁转动部、上锁连接部以及上锁卡接部;
所述解锁偏摆件具有:解锁转动部、解锁连接部以及解锁卡接部;
所述上锁转动部与所述解锁转动部穿设于所述箱门,所述上锁卡接部与所述解锁卡接部相互卡持;
所述弹性连接组件包括:连接套筒、连接杆以及伸缩弹性件;
所述连接套筒与所述解锁连接部连接,所述连接杆与所述上锁连接部连接,所述伸缩弹性件套接于所述连接杆,所述伸缩弹性件与所述连接杆收容于所述连接套筒内,所述伸缩弹性件为所述弹性连接组件提供弹性力。
在其中一个实施例中,所述解锁转动部为多边形棱柱结构。
在其中一个实施例中,所述储物机械锁还包括单向卡持组件以及解锁钥匙;
所述单向卡持组件包括卡持座以及单向卡钉;
所述卡持座固定安装于所述箱门上,所述单向卡钉通过复位弹性件安装于所述卡持座上,所述解锁转动部上开设有解锁槽,所述单向卡钉与所述解锁槽配合实现所述解锁转动部的单向转动;
所述解锁钥匙上开设有解锁斜面。
在其中一个实施例中,所述伸缩弹性件为弹簧结构。
在其中一个实施例中,所述上锁偏摆件的所述上锁转动部上设有转动握把。
在其中一个实施例中,所述箱体本体上设有滚轮。
在其中一个实施例中,所述箱体本体上设有百叶窗。
综上,本发明的一种基于BIM的城市轨道施工设备,既可以减轻施工人员的工作负担,又可以防止无关人员对作业工具的取用。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
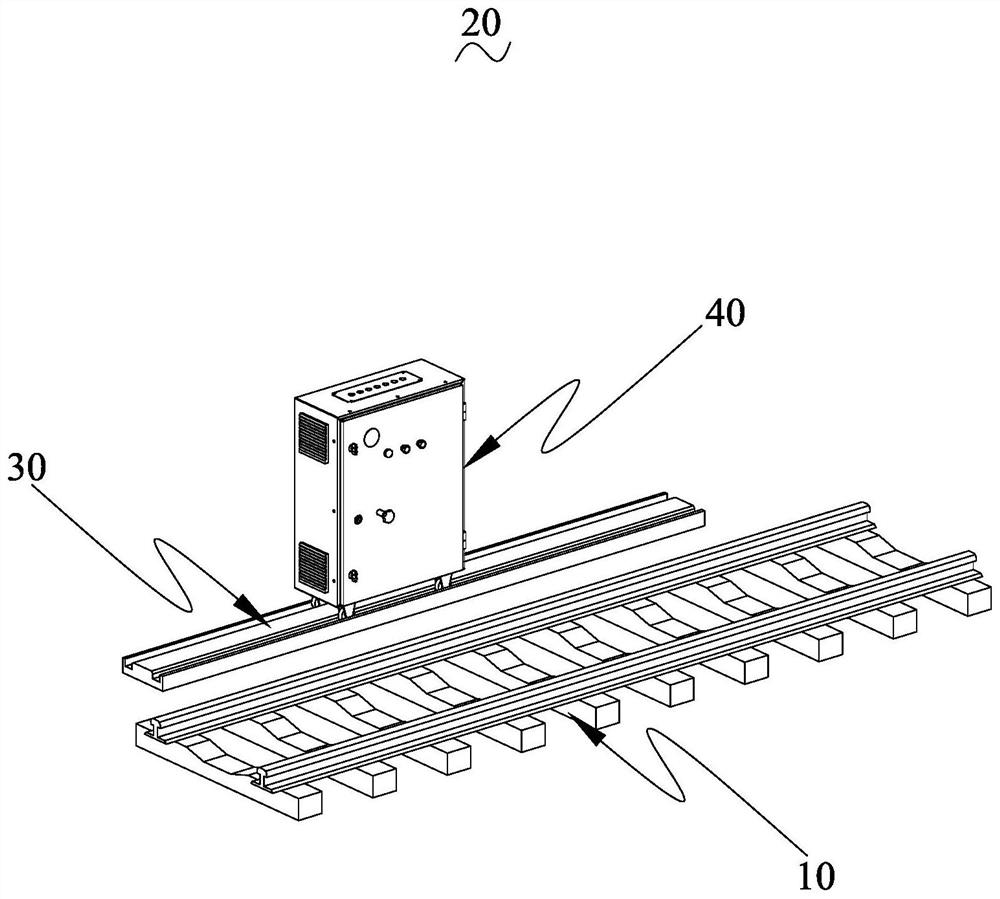
图1为本发明一种基于BIM的城市轨道施工设备的结构示意图;
图2为图1所示的移动储物箱的结构示意图;
图3为图2所示的储物机械锁在解锁状态的结构示意图;
图4为图2所示的储物机械锁在上锁状态的结构示意图;
图5为上锁偏摆件和解锁偏摆件的结构示意图;
图6为储物机械锁在上锁或解锁过程的变化状态示意图;
图7为单向卡持组件的结构示意图(一);
图8为单向卡持组件的结构示意图(二);
图9为解锁钥匙的结构示意图;
图10为解锁钥匙与单向卡持组件配合解锁的状态示意图。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
如图1所示,本发明的一种基于BIM的城市轨道施工设备20,包括无限延伸的平行导轨30、移动储物箱40以及储物机械锁50。其中,如图2所示,移动储物箱40包括箱门41及箱体本体42,箱体本体42滑动设于平行导轨30上,储物机械锁50安装于箱门41上。
施工时,如图1所示,施工人员首先在需要安装或检修的轨道10旁安放平行导轨30,平行导轨30可以根据需要不断延伸;然后,将移动储物箱40安装在平行导轨30上;最后将作业工具或施工机械放入移动储物箱40内。如此,在施工过程中,施工人员无需再背负作业工具或施工机械,只需推动移动储物箱40,就可以将作业工具或施工机械带到指定位置。同时,为了妥善保管放置在移动储物箱40内的作业工具或施工机械,防止无关人员随意取用,移动储物箱40上还安装有储物机械锁50。储物机械锁50具有“上锁容易解锁难”的特点,“上锁容易”是为了节省施工人员的时间和精力,施工人员暂时离开轨道时,只需要简单操作便可以将移动储物箱40上锁;“解锁难”是为了增加解锁的复杂程度,解锁并打开移动储物箱40时,需要借助其他工具或花费较大气力。储物机械锁50具体的工作原理将在下文进行阐述说明。
具体的,如图3所示,储物机械锁50包括:锁体基座100、锁销200、上锁偏摆件300、解锁偏摆件400以及弹性连接组件500。
锁体基座100安装于箱门41上,锁销200滑动设于锁体基座100上,上锁偏摆件300与解锁偏摆件400转动设于锁体基座100上,上锁偏摆件300通过弹性连接组件500与解锁偏摆件400驱动连接,锁销200上设有驱动齿210,上锁偏摆件300上设有与锁销200的驱动齿210啮合的扇形齿轮340。
如图3及图4所示,上锁偏摆件300具有:上锁转动部310、上锁连接部320以及上锁卡接部330;解锁偏摆件400具有:解锁转动部410、解锁连接部420以及解锁卡接部430。其中,上锁转动部310与解锁转动部410穿设于箱门41,上锁卡接部330与解锁卡接部430相互卡持,两者相互卡持使储物机械锁50在没有外力驱动的情况下可以稳定保持在解锁状态或上锁状态。
要注意的是,如图5所示,上锁卡接部330具有上锁顶持面331以及上锁压持面332;相应的,解锁卡接部430具有解锁顶持面431以及解锁压持面432。如图3所示,处于解锁状态时,上锁顶持面331卡持在解锁压持面432上;如图4所示,处于上锁状态时,解锁顶持面431卡持在上锁压持面332上。具体步骤将在下文进行阐述说明。
在本实施例中,如图3所示,解锁转动部410为多边形棱柱结构。
在本实施例中,如图5所示,弹性连接组件500包括:连接套筒510、连接杆520以及伸缩弹性件530。连接套筒510与解锁连接部420连接,连接杆520与上锁连接部320连接,伸缩弹性件530套接于连接杆520上,伸缩弹性件530与连接杆520收容于连接套筒510内,伸缩弹性件530为弹性连接组件500提供弹性力。在其中一个实施例中,如图5所示,伸缩弹性件530为弹簧结构。
下面结合本实施例,对储物机械锁50的工作原理进行具体说明:
为了详细说明储物机械锁50的工作原理,如图6所示,将储物机械锁50的上锁或解锁过程分为三个步骤,并分别用数字标记1至3表示;
上锁过程时,储物机械锁50的状态从数字标记1变化至数字标记3。开始时,储物机械锁50处在解锁状态,即数字标记1所示状态,此时,上锁顶持面331卡持在解锁压持面432上,锁销200收容在锁体基座100内。接着,如数字标记2所示,施工人员按图中所示顺时针方向转动上锁偏摆件300的上锁转动部310,设于上锁偏摆件300上的扇形齿轮340被带动一起做旋转运动,并推动锁销200伸出锁体基座100。伸出的锁销200与箱体本体42上的锁槽(图未示)相互扣合,使移动储物箱40闭合。此时,随着上锁偏摆件300转动,上锁顶持面331开始脱离解锁压持面432;且上锁连接部320与解锁连接部420之间的距离不断变大,弹性连接组件500被拉伸,其内的伸缩弹性件530被压缩并积蓄弹性势能。紧接着,当上锁顶持面331完全脱离解锁压持面432,失去了上锁卡接部330的抵持,解锁偏摆件400在弹性连接组件500的拉动下做顺时针方向的旋转运动,如图6的数字标记3所示。随后,解锁卡接部430的解锁顶持面431抵持在上锁压持面332上,防止上锁偏摆件300反向(逆时针)转动。如数字标记3所示,此时,上锁偏摆件300受到解锁卡接部430与锁体基座100上定位柱110的卡持无法转动,解锁偏摆件400受到上锁偏摆件300的卡持和弹性连接组件500的拉力也无法转动,如此,储物机械锁50将保持在稳定的上锁状态;
解锁过程时,储物机械锁50的状态从数字标记3变化至数字标记1。施工人员利用外部工具等驱动解锁转动部410,使得解锁偏摆件400做逆时针方向旋转动作,此时,解锁顶持面431开始脱离上锁压持面332,且上锁连接部320与解锁连接部420之间的距离不断变大,弹性连接组件500被拉伸,其内的伸缩弹性件530被压缩并积蓄弹性势能,如图6的数字标记2所示。当解锁顶持面431完全脱离上锁压持面332后,上锁偏摆件300失去了解锁偏摆件400的卡持,并在弹性连接组件500的拉动下开始逆时针转动。上锁偏摆件300的转动将带动扇形齿轮340一起旋转,并最终推动锁销200重新收容到锁体基座100内,实现移动储物箱40的解锁操作。同时,逆时针转动后,上锁偏摆件300的上锁卡接部330将再次与解锁卡接部430相互卡持,使得储物机械锁50稳定保持在解锁状态。
要强调的是,无论处在上锁状态还是解锁状态,由于弹性连接组件500的弹性力,上锁卡接部330与解锁卡接部430总是卡持在一起。上锁状态时,解锁卡接部430的解锁顶持面431抵持在上锁压持面332上;解锁状态时,上锁顶持面331卡持在解锁压持面432上。而且,如图6的数字标记2所示,上锁卡接部330与解锁卡接部430上还设有防脱挡块600,防脱挡块600用于防止上锁卡接部330与解锁卡接部430在相互卡持的过程中发生错位越位的现象。在没有外力介入的情况下,储物机械锁50能够稳定保持在上锁状态或者解锁状态。这样的设计,使得储物机械锁50内部的配合更加紧凑,且使储物机械锁50的工作过程更加安全可靠。
要说明的是,如图2所示,上锁转动部310与解锁转动部410穿设于箱门41,而且上锁转动部310要长于解锁转动部410,操作人员容易转动较长的上锁转动部310,却难以转动解锁转动部410。在其中一个实施例中,如图3所示,上锁偏摆件300的上锁转动部310上设有转动握把350,使得操作人员可以更便捷地转动上锁偏摆件300。如此,上锁时,施工人员只需要将箱门41关上,再沿着顺时针方向转动上锁转动部310,便可以完成对移动储物箱40的上锁操作;而解锁时,操作人员需要借助外部工具,比如扳手等,才能转动解锁转动部410,实现解锁操作。
在实际应用中,一旦无关人员熟悉储物机械锁50的结构及原理,则无关人员通过自带的扳手也可以转动解锁转动部410,实现解锁操作。为了防止上述现象的发生,在其中一个实施例中,储物机械锁50还包括单向卡持组件700以及解锁钥匙800。
具体的,如图7所示,单向卡持组件700包括卡持座710以及单向卡钉720。
如图7及图8所示,卡持座710固定安装于箱门41上,单向卡钉720通过复位弹性件730安装于卡持座710上,解锁转动部410上开设有解锁槽411,单向卡钉720与解锁槽411配合实现解锁转动部410的单向转动。如图9所示,解锁钥匙800上开设有解锁斜面810。
安装单向卡持组件700后,在上锁过程中,由于单向卡钉720具有单向斜面,单向卡钉720会在解锁转动部410顺时针转动时做出避让动作,不影响上锁过程中解锁转动部410的转动。当储物机械锁50完成上锁时,解锁转动部410的解锁槽411正好与单向卡钉720的位置相对应。此时,在复位弹性件730的作用下,单向卡钉720将卡持在解锁槽411内,如图7及图8所示。解锁时,若依旧使用普通扳手转动解锁转动部410,则在单向卡钉720的卡持下,解锁转动部410将无法旋转。只有采用解锁钥匙800才能完成解锁操作,具体如下:
如图10所示,将解锁钥匙800插接到解锁转动部410上,在插接过程中,随着解锁钥匙800的伸入,单向卡钉720将逐渐被解锁斜面810顶起,并最终不再卡持在解锁槽411内,此时便可以轻松转动解锁转动部410,完成解锁操作了。
在其中一个实施例中,如图2所示,箱体本体42上设有滚轮43,移动储物箱40通过滚轮43滑动设于平行导轨30上。安装滚轮43后,施工人员可以轻易推动移动储物箱40,使其滑动至平行导轨30上的任意位置。
在其中一个实施例中,箱体本体42上设有百叶窗44,如此,既可以实现箱体本体42内部通气,又不会使雨水溅入箱体本体42内。
综上所述,本发明的一种基于BIM的城市轨道施工设备20,既可以减轻施工人员的工作负担,又可以防止无关人员对作业工具的取用。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种基于BIM的城市轨道施工设备
- 一种基于BIM的城市轨道施工设备