抽屉式组合垃圾桶
文献发布时间:2023-06-19 11:30:53
技术领域
一种适合公共场合室内室外、人行道上配置的抽屉式组合垃圾桶,由台面滑道组件、垃圾桶组件、支撑腿组件三部分构成。
台面滑道组件由乱丝不锈钢板倒盘子型台面、六条三节滑轨、双轨和单轨三节滑轨框架套各两个、三个U型垃圾桶连接套板和两个带有一对螺栓孔的腿套箍构成。台面上有三个圆形垃圾投入口和裙边,一张板经过激光、冲压一次成型,美观、大气、耐磨,长年保持光泽亮丽;先将六条三节滑轨的第一节分别固定连接在四个三节滑轨框架套上、再将两个腿套箍焊接在台面底板上,然后将两个双轨三节滑轨框架套分别套住腿套箍、焊接在台面底板上,将两个单轨三节滑轨框架套焊接在台面底板的两边、六条三节滑轨形成对应的三组,最后将三个U型垃圾桶连接套板分别固定连接在各组三节滑轨的第三节上。
垃圾桶组件由一次注塑成型的垃圾桶上带有两组光轴套的塑胶垃圾桶三个,每个垃圾桶配两根光轴、一条单面薄板夹子和两个夹子弹簧、一条单面厚板夹子和塑料袋夹子自动开起台阶构成。将单面薄板夹子和夹子弹簧一并穿入光轴内,光轴两端分别穿入垃圾桶两个后轴套用螺钉固定,弹簧一端压紧在单面薄板夹子上,弹簧另一端压紧在垃圾桶壁上;再将单面厚板夹子穿入光轴,光轴两端分别穿入垃圾桶两个前轴套用螺钉固定;在垃圾桶前轴上方的台面底板上焊接塑料袋夹子自动开起台阶。
支撑腿组件由两根不锈钢圆管腿和两套螺杆螺帽、一张普通钢板底座、一个不锈钢底座扣板构成。钢板底座有两个圆管腿焊接圆孔和数个地螺栓孔,两个圆管腿一端分别焊接在钢板底座上,套上不锈钢底座扣板,另一端有两个与台面纵向的螺栓孔。
抽屉式组合垃圾桶三部分的组件便于包装运输、现场安装。
根据公共场合的不同,可固定安装不同垃圾桶数量、不同尺寸、不同形式的抽屉式组合垃圾桶,也可灵活放置移动抽屉式组合垃圾桶。
抽屉式组合垃圾桶更换两个部件:一是将U型垃圾桶连接套板更换为方型垃圾桶连接套板、二是垃圾桶组件更换为不使用垃圾袋的方型提篮垃圾桶,即可由无人驾驶智能机器人垃圾车收纳各类垃圾。无人驾驶智能机器人垃圾车的结构图可参阅同一发明人的专利《室外袋装有机垃圾智能收纳装置和装载运输加工系统》(20211)。
背景技术
本专利是配合同一发明人《室内有机垃圾收纳装置》(202011598516.2)和《室外袋装有机垃圾智能收纳装置和装载运输加工系统》(20211)两个专利中的塑料垃圾的独立收纳而设计的,适应市区公共场所尤其是马路人行道现有配置的两个垃圾桶,增加一个收纳塑料垃圾的三个垃圾桶的组合。
目前垃圾箱已成为公共场所必的备装置,由于垃圾分类和垃圾品种繁多,不同的公共场所主要垃圾桶的种类不同,尤其是很多公共场所在同一个地方零散摆放一排垃圾桶。现有垃圾箱更换垃圾袋比较繁琐。现代化城市需要提高公共场所垃圾桶的技术含量和外观质量。再有塑料垃圾是全球共识的污染公害,应在公共场所独立设置一个塑料垃圾桶,即:可回收垃圾桶、塑料垃圾桶和其它垃圾桶为一个组合。
乱丝不锈钢板倒盘子型台面,由一张乱丝不锈钢厚板经过激光、冲压一次成型,美观、大气、耐磨,长年保持光泽亮丽。
发明内容
一种公共场合室内外、人行道上配置的抽屉式组合垃圾桶,由台面滑道组件、垃圾桶组件、支撑腿组件三部分构成。
台面滑道组件由乱丝不锈钢板倒盘子型台面、阻尼缓冲承重型三节滑轨、双轨和单轨三节滑轨框架套、U型垃圾桶连接套板、腿套箍和塑料袋夹子自动开起台阶构成;台面上有数个圆形垃圾投入口和台面裙边是由一张乱丝不锈钢板经过激光、冲压一次成型;先将三节滑轨的第一节分别固定连接在三节滑轨框架套上,校准腿套箍上的两个螺栓孔连线与台面纵向平行后、将其焊接在台面底板上,然后将双轨三节滑轨框架套套住腿套箍后、焊接在台面底板上,再将两个单轨三节滑轨框架套焊接在台面底板的两边,最后将U型垃圾桶连接套板固定连接在面对面的两条三节滑轨的第三节上,形成一个垃圾桶的抽屉框架;在抽屉框架出口处的底板上焊接一个塑料袋夹子自动开起台阶。
垃圾桶组件由一次注塑成型的带有两组光轴套的塑胶垃圾桶、两根光轴、一条单面薄板夹子和两个夹子弹簧、一条单面厚板夹子构成;将单面薄板夹子和夹子弹簧一并穿入光轴内,光轴两端分别穿入垃圾桶两个后轴套两端用螺钉固定,弹簧一端压紧在单面薄板夹子上、弹簧另一端压紧在垃圾桶壁上,再将单面厚板夹子穿入光轴,光轴两端分别穿入垃圾桶两个前轴套两端用螺钉固定。
支撑腿组件由不锈钢圆管腿和螺栓螺帽、一张普通钢板底座、一个不锈钢底座扣板构成,钢板底座上有圆管腿焊接圆孔和地螺栓孔,圆管腿一端垂直焊接在钢板底座上,套上不锈钢底座扣板,另一端有两个与台面纵向平行的螺栓孔,安装时与腿套箍上的两个螺栓孔同心。
抽屉式组合垃圾桶的三套组件,便于包装运输和现场安装:一是用地螺栓将钢板底座固定在地面上、不锈钢底座扣板插入直立圆管腿扣在钢板底座上;二是将乱丝不锈钢板倒盘子型台面下方的腿套箍套入直立的圆管腿上,腿套箍和圆管腿螺栓孔自动对齐、长螺栓插入两组螺栓孔锁紧螺帽固定;三是抽出U型垃圾桶连接套板,将垃圾桶上沿压在U型垃圾桶连接套板上水平推入,对准垃圾桶壁上的三个螺栓孔与U型垃圾桶连接套板上的三个螺栓孔、用螺栓和螺帽拧紧固定,将垃圾桶推进半程、从上面的垃圾投放口打开安装前被捆绑的垃圾桶单面薄板夹子恢复夹子弹起;四是抽出垃圾桶,单面薄板夹子被塑料袋夹子自动开起台阶抬起,再将垃圾袋口展开镶入薄板夹子中,向里略微推动垃圾桶,夹子下落锁住垃圾袋在桶边沿上,双手拉着垃圾袋沿桶左右两边将垃圾袋套在桶沿上继续往里推桶,当垃圾袋套住桶前沿时,手动翻转单面厚板夹子近270度压住垃圾袋,继续推桶到位,由垃圾桶后定位弹性沟槽和三节滑轨上的后碰珠共同定位;更换垃圾袋时拉出垃圾桶,由三节滑轨自身长度和前碰珠共同定位,单面薄板夹子自动抬起更换垃圾袋;
倒盘子型台面圆形垃圾入口直径小于方形垃圾桶边长,防止投入垃圾时对垃圾袋立面的直接冲击;室外雨水进入垃圾袋时,换袋前用细棍棒对准桶底破袋漏水孔捅破垃圾袋,水排净后再开始更换新的垃圾袋;
根据公共场合的不同,可固定安装不同垃圾桶数量、不同尺寸、不同形式的抽屉式组合垃圾桶,也可灵活放置移动抽屉式组合垃圾桶。
抽屉式组合垃圾桶可适应无人驾驶智能机器人垃圾车收纳垃圾,抽屉式组合垃圾桶需更换两个部件、一次旋转和统一安装距离:一是将U型垃圾桶连接套板更换为方型垃圾桶连接套板、二是垃圾桶组件更换为不使用垃圾袋的方型提篮垃圾桶、三是将台面板固定螺栓卸下台面板旋转180度后再上紧螺栓、四是人行道上的抽屉式组合垃圾桶距马路沿的距离按统一标准安装;
当无人驾驶智能机器人垃圾车在自行车道上行驶到抽屉式组合垃圾桶背面时,机器人活动臂拉动垃圾桶拉手,垃圾桶全部滑动出来,机器人活动臂勾起垃圾桶提篮、从方型垃圾桶连接套板抽出、将垃圾桶提升到垃圾车顶部的垃圾入口处,垃圾桶底部的垃圾桶一体塑胶轴准确落入入口处半圆轴套内、机器人活动臂握住提篮翻转垃圾桶,塑胶轴在半圆轴套内旋转、直至倒净桶内垃圾后,车载高压水枪开始瞬间喷洗垃圾桶两次,污水流入垃圾柜内,机器人活动臂再次拎起垃圾桶放回到方型垃圾桶连接套板内,机器人活动臂推动垃圾桶臂归位;无人驾驶智能机器人垃圾车配置对应数量的分类垃圾柜。
附图说明
下面结合附图和实施例对本发明进一步说明。
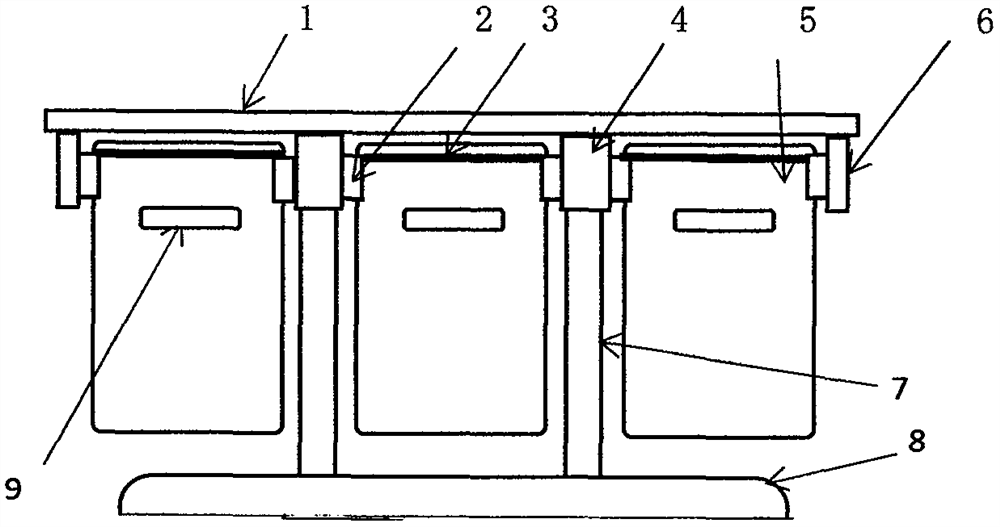
图1是抽屉式组合垃圾桶主视图。
图2是图1的左视图。
图3是图1的俯视图。
图4是垃圾桶后定位弹性沟槽示意图。
图5是图3垃圾桶抽出时的位子图。
图6是图5的左视图。
图7是三节滑轨第一节和第三节、不锈钢双轨和单轨三节滑轨框架套、U型垃圾桶连接套板的固定连接位置图。
图8是U型垃圾桶连接套板主视图。
图9是图8的俯视图。
图10是图9的右视图。
图11是垃圾桶的主视图。
图12是图11的左视图。
图13是图11的俯视图。
图14是后轴弹簧自动塑料袋单面薄板夹子和塑料袋夹子自动开起台阶的位置图。
图15是前轴手动塑料袋单面厚板夹子翻转示意图。
图16是前轴手动塑料袋单面厚板夹子主视图。
图17是图16的右视图。
图18是乱丝不锈钢倒盘子型台面的主视图。
图19是图18的A-A剖视图。
图20是不锈钢圆腿、不锈钢底座扣板和钢板底座的位置图。
图21是图20的俯视图。
图22是注塑垃圾桶主视图。
图23是图22的俯视图。
图24是抽屉式组合垃圾桶挂墙式安装示意图。
图25是烟缸主视图。
图26是图25的俯视图。
图27是抽屉式两个垃圾桶结构图。
图28是抽屉式四个垃圾桶结构图。
图29是抽屉式三个垃圾桶圆台面结构图。
图30是单个抽屉式垃圾桶主视图。
图31是图30的左视图。
图32是腿套箍与不锈钢圆腿安装示意图。
图33是图32的左视图。
图34是可移动抽屉式组合垃圾桶主视图。
图35是图34的左视图。
图36是方型连接套板上的垃圾桶主视图。
图37是图36的左视图。
图38是图36的俯视图。
图39是方型垃圾桶连接套板
图40是车载机器人活动臂吊起垃圾桶翻转向车载垃圾柜倒垃圾和喷水示意图。
图中1.乱丝不锈钢倒盘子型台面,2.三节滑轨第一节,3.前轴,4.不锈钢双轨三节滑轨框架套,5.塑胶垃圾桶,6.不锈钢单轨三节滑轨框架套,7.不锈钢圆腿,8.不锈钢底座扣板,9.塑胶拉手,10.后轴,11.后轴弹簧自动塑料袋单面薄板夹子,12.前轴手动塑料袋单面厚板夹子,13.轨第二节,14.三节滑轨第三节,15.U型垃圾桶连接套板,16.套板与滑轨第三节固定连接螺钉,17.套板与滑轨第一节固定连接螺杆和螺帽,18.连接套板和垃圾桶螺杆孔,19.夹子弹簧,20.后轴夹子自动开起台阶,21.套板与垃圾桶连接螺杆和螺帽,22.破袋漏水孔,23.钢板底座,24.地螺栓孔,25.焊接立柱孔,26.墙体,27.圆形垃圾入口,28.地面,29.烟缸,30.灭火台儿,31.路边垃圾桶台面预留AED空投支架孔,32.塑料瓶和餐盒垃圾桶临时挂钩,33.垃圾桶后定位弹性沟槽,34.拉丝不锈钢扁方立柱,35.地螺栓,36.双面贴,37.排气孔,38.腿套箍,39.螺栓螺帽,40.可移动抽屉式组合垃圾桶球形轮子,41.方型垃圾桶连接套板,42.提篮垃圾桶,43.提篮。44.垃圾桶一体塑胶轴,45.高压喷头,46.车载垃圾柜垃圾入口,47.车载机器人活动臂,48.垃圾柜半圆轴套,49.溢水孔。
具体实施方案
图1、图2和图3中,是以可回收垃圾桶、塑料垃圾桶和其它垃圾桶为一个组合为例的抽屉式组合垃圾桶,除商品阻尼缓冲承重型三节滑轨2.、垃圾桶5.和钢板底座23.外,其它部件均为304型号的不锈钢材质。马路人行道上的乱丝不锈钢倒盘子型台面1.上有三个AED空投支架孔31.,为另外一个同发明人专利《智能AED空间救援系统》的应用孔。
图4中是垃圾桶5.归位时的弹性定位器33.,加大三节滑道自身带有定位的力度。
图5和图6中,手动全部拉出垃圾桶5.更换垃圾袋时,三节滑轨2.的拉伸碰珠定位和前后垃圾袋夹子10.和12.的位置。
图7中不锈钢单、双轨三节滑轨框架套4.和三节滑轨的第一节2.用螺栓螺帽国定连接,U型垃圾桶连接套板15.和三节滑轨的第三节14.用螺栓国定连接。
三节滑道2.自身带有两处定位,即全部收回碰珠阻尼定位和全部拉出碰珠阻尼定位,两处定位也就是垃圾桶5.拉出更换垃圾袋和推进归位的定位。
图8、图9和图10中,U型垃圾桶连接套板15.是较厚的不锈钢材质,用三套螺杆螺帽连接固定垃圾桶5.。
乱丝不锈钢倒盘子型台面1.下方焊接好部件后,出厂时作为一个台面滑轨组件包装。
图11、图12、图13、图14、图15图16和图17中,垃圾桶5.前光轴上的手动单面夹子是较厚重的不锈钢材质;后轴10.弹簧19.自动塑料袋单面薄板夹子11.随着垃圾桶5.完全抽出,夹子顶端被后轴夹子自动开起台阶20下压,夹子11.与垃圾桶5.分开,可取出被压紧的垃圾袋,将新垃圾袋插入夹子11.内,向里推动垃圾桶5.,夹子落下垃圾袋被夹紧;前后两个夹子的为锯齿形状。出厂时作为一个垃圾桶组件包装。
图18和图19中,乱丝不锈钢倒盘子型台面1.的材质耐磨,始终保持光滑美观,板厚采用2.0mm板材,激光后一次冲压裙边成型,裙边宽度在1.5cm。
图20和图21中,不锈钢圆腿7.焊接在钢板底座23.上,保持圆腿另一端的两个孔纵向垂直;套上不锈钢底座扣板8.。出厂时作为一个底座组件包装。
图22和图23中,垃圾桶注塑时将轴孔、排气孔、破袋漏水孔一次成型。轴孔支架根部要低于垃圾桶5.上沿,便于垃圾袋翻边。垃圾桶5.底部略小于上部桶口,便于套装运输。
图24中,是可固定在墙体上安装。
图25和图26中,抽屉式组合垃圾桶安装在室外,必要时在乱丝不锈钢倒盘子型台面1.上开孔、背面点焊安装烟缸29.,烟缸的灭火台30.儿要宽。
图27、图28和图29中,抽屉式组合垃圾桶根据需要还可定制两个垃圾桶,四个垃圾桶的组合,饭店和写字楼场合必要时可在抽屉式组合垃圾桶的挂钩上钩挂餐盒专用垃圾桶等。圆形三个垃圾桶组合更适合室外广场和步行街等环境。
图30和图31中,室内单个垃圾桶采用单板式大力胶固定安装。
图32和图33中,现场安装时将不锈钢圆腿7.上方插入腿套箍38.内,孔自动对齐穿进螺栓上紧螺帽。
图34和图35是可移动抽屉式组合垃圾桶,适应各种形式的抽屉式组合垃圾桶,数个球形轮子40.安装在钢板底座23.上,再扣上不锈钢底座扣板8.。
图36、图37和图38中,为适应智能机器人垃圾车收纳垃圾,人行道上的抽屉式组合垃圾桶更换两个部件,一是提篮垃圾桶42.,二是方型垃圾桶连接套板41.,提篮垃圾桶42.左右两个桶臂上有两个对称的溢水孔49.。
图39中,方型垃圾桶连接套板41.与U型垃圾桶连接套板15.板上的孔结构相同。
图40中,机器人活动臂47.将提篮垃圾桶42.底部的塑胶轴44.落入半圆轴套48.内、机器人活动臂47.拉着垃圾桶42.,塑胶轴44.在半圆轴套48.内旋转、直至倒净桶内垃圾后,车载高压水枪45.喷洗垃圾桶。
- 抽屉式组合垃圾桶
- 抽屉式自动套袋垃圾桶及其组合