基于气体润滑机械解耦的六维力测量装置
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及一种基于气体润滑机械解耦的六维力测量装置,属于六维力测量装置技术领域。
背景技术
六维力测量装置技术对于精密制造装配、机器人运动感知等研究至关重要。六维力测量装置技术可实现对产品所受的六维力快速、高精度地测量。同时根据特殊的工作场景,六维力测量装置技术还需满足额外指定的要求。
现有的六维力测量装置通常采用基于传感器结构应变-应力解算的方式,即通过多个应变传感器测量结构的应变,依据应变传感器布局解算传感器所受六维力大小,这类传感器结构紧凑广泛应用于六维力测量场合。然而,存在不同方向力和力矩之间存在互相耦合作用,难以满足高精度的测量要求。目前,在尖端设备及高精密装备的制造中,高精密的机械产品自身重量较大,采用传统的六维力测量传感器直接进行测量,对产品所受额外的外力/力矩不敏感,同时由于六维力测量传感器不同方向间耦合作用,产品自身重力会对其他方向分力/力矩测量造成很大系统误差。
发明内容
针对现有六维力测量装置的测量误差大的问题,本发明提供一种基于气体润滑机械解耦的六维力测量装置。
本发明的一种基于气体润滑机械解耦的六维力测量装置,所述装置包括:承载平台、称重测量系统、气浮润滑装置、水平力测量系统和基座;
称重测量系统包括N个称重传感器,N为大于等于3的正整数;
气浮润滑装置包括上面板和气浮轴承;
N个称重传感器固定在上面板的上表面,承载平台设置在N个称重传感器上,承载平台用于放置被测产品,气浮轴承和基座设置在上面板的下方;
气浮轴承放置在基座上,气浮轴承工作状态下与基座上表面间形成一层气膜,承载气浮轴承所受的压力和力矩,同时消除气浮轴承在基座所在平面运动所受的摩擦力;
水平力测量系统安装在上面板的侧面,用于测量上面板所受横向力和力矩。
作为优选,所述水平力测量系统包括多个测力传感器、相同数量的球头轴承、相同数量的螺杆和垫板;
螺杆的一端与基座相连,螺杆的另一端从垫板的一个侧面穿过,通过调节螺杆上的螺母位置可调节垫板与基座间的距离,测力传感器固定在垫板的另一个侧面,每个测力传感器的检测端安装有球头轴承,球头轴承支撑在上面板的侧面。
作为优选,所述装置还包括处理器;
处理器,用于根据N个称重传感器的安装位置和称重传感器的力信息的变化,获取待测产品实时所受的纵向力和力矩,根据测力传感器的安装位置和测力传感器的力信息的变化,获取待测产品实时所受的横向力和力矩,还用于解算出在测量坐标系下的合力和力矩。
作为优选,N个称重传感器组成称重测量坐标系,称重测量坐标系与待测产品坐标系重合,测力传感器组成的水平测量坐标系与待测产品坐标系在Z轴方向存在偏移。
本发明的有益效果:本发明采用气体润滑装置可实现产品的重力卸载,消除产品重力对其他方向力和力矩测量造成的影响,提高六维力测量系统对大重量产品所受横向力/力矩的感知能力;同时本发明的气体润滑装置可对六维力测量装置中机构起润滑作用,相比于其他机械机构解耦方式,消除机构间摩擦作用的影响,提高六维力测量装置的测量精度;另外本发明所提出的传感器布局方式和解算方法,在仅通过称重传感器和测力传感器采集的力信息(即无力矩传感器),可获得产品所受六维力的信息。
附图说明
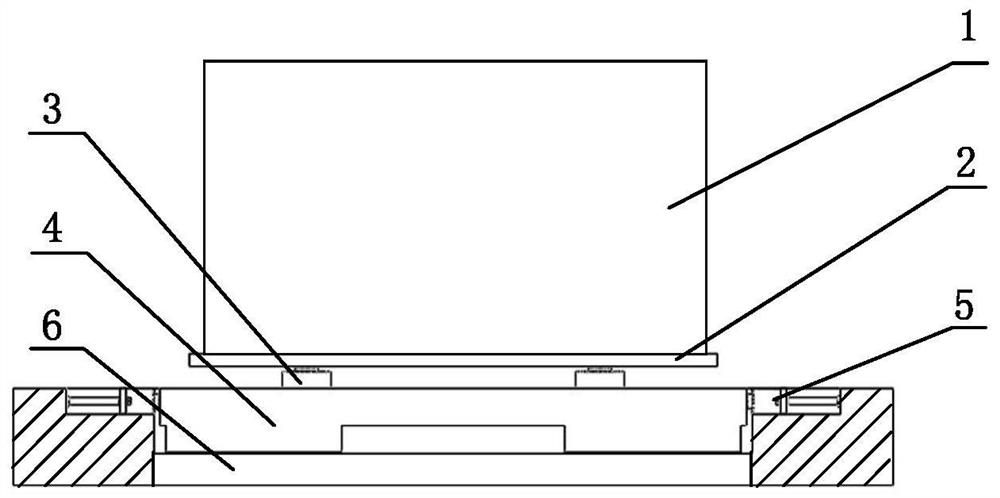
图1是本发明的六维力测量装置的示意图;
图2是图1的俯视图(不包括待测产品1);
图3是气浮润滑装置的结构示意图;
图4是水平力测量系统的结构示意图;
图5是称重传感器和测力传感器的布局示意图;
图6是图5的横截面的剖视图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
如图1和2所示,本实施方式的基于气体润滑机械解耦的六维力测量装置,其特征在于,所述装置包括:承载平台2、称重测量系统3、气浮润滑装置4、水平力测量系统5和基座6;
称重测量系统3包括N个称重传感器,N为大于等于3的正整数;
气浮润滑装置4包括上面板4-1和气浮轴承4-2;
N个称重传感器固定在上面板4-1的上表面,承载平台2设置在N个称重传感器上,承载平台2用于放置被测产品1,气浮轴承4-2和基座6设置在上面板4-1的下方;N个称重传感器可实时感知被测产品1的重量分布的变化,依据称重传感器的布局信息,可以直接解算出产品实时所受的纵向力/力矩;
气浮轴承4-2放置在基座6上,气浮轴承4-2工作状态下与基座6上表面间形成一层气膜,气膜可承载气浮轴承4-2所受的压力和力矩,同时消除气浮轴承4-2在基座6所在平面运动所受的摩擦力;
水平力测量系统5安装在上面板4-1的侧面,用于测量上面板4-1所受横向力和力矩。
本实施方式采用气浮润滑装置4主要用于承载设备和产品的重量,将待测产品所受六维力沿纵向和横向进行解耦,分别采用称重传感器和水平力测量系统5进行测量,可以消除其他方向力/力矩间耦合作用引入的测量误差。
如图4所示,本实施方式中,水平力测量系统5包括多个测力传感器5-1、相同数量的球头轴承5-2、相同数量的螺杆5-4和垫板5-3;水平力测量系统5对产品所受横向力和力矩进行测量。
螺杆5-4的一端与基座6相连,螺杆5-4的另一端从垫板5-3的一个侧面穿过,通过调节螺杆5-4上的螺母位置可调节垫板5-3与基座6间的距离,测力传感器5-1固定在垫板5-3的另一个侧面,每个测力传感器5-1的检测端安装有球头轴承5-2,球头轴承5-2支撑在上面板4-1的侧面。
本实施方式中测力传感器5-1安装垫板5-3上,垫板5-3通过螺杆5-4与基座6相连接,通过调节螺杆上螺母可调整垫板5-3与基座6间的位置,同时可以实现对测力传感器5-1预紧力调整。测力传感器5-1前端安装球头轴承5-2与上面板4-1配合,由于球头轴承5-2中滚球润滑作用,可以消除滚珠与上面板4-1间的摩擦力和其他方向分力/力矩。根据测力传感器5-1的力信息和测力传感器布局位置信息,可以解算出产品所受的横向力和力矩;
称重测量系统3中称重传感器数目要求不少于3个,可按照如图2所示,但不限于图2所示传感器布局方式固定在上面板4-1上,称重传感器可采用柱式传感器,但不限于此种类。称重传感器上端与承载平台2可采用螺栓等方式固连在一起。
如图3所示,所述气浮润滑装置4中气浮轴承4-2安装在上面板4-1下端面上,气浮轴承4-2工作面与基座6相配合。气浮轴承4-2在工作状态下需要通入6~8个大气压的低压气源,气浮轴承4-2工作面与基座6间会形成一层气膜,其中气浮轴承4-2可采用多孔质式气浮平面轴承,但不限于此种类,基座6与气浮轴承4-2配合面的平面度要求达到00级规格。
如图2所示,本实施方式包括4个水平测量系统5,在上面板4-1的侧面分别布置在基座6上。其中,水平测量系统5如图4所示,测力传感器5-1安装在垫板5-3上,测力传感器5-1顶端安装球头轴承5-2,垫板5-3与基座6通过螺杆5-4连接,通过调节螺杆5-4上的螺栓调整垫板5-3的位置,直至球头轴承5-2顶在上面板4-1上,并且测力传感器5-1需采集到力信息,即预紧力的值。其中测力传感器可采用压电式测力传感器,但不限于此种类。每套水平测量系统5中测力传感器5-1要求不少于2个,测力传感器布局可按照如图2所示,但不限于图2具体的布局方式。
本实施方式的基于气体润滑机械解耦的六维力测量装置还包括处理器;
处理器,用于根据N个称重传感器的安装位置和称重传感器的力信息的变化,获取待测产品实时所受的纵向力和力矩,根据测力传感器5-1的安装位置和测力传感器5-1的力信息的变化,获取待测产品实时所受的横向力和力矩,还用于解算出在测量坐标系下的合力和力矩。
本实施方式N个称重传感器组成称重测量坐标系,称重测量坐标系与待测产品坐标系重合,测力传感器5-1组成的水平测量坐标系与待测产品坐标系在Z轴方向存在偏移。
本实施方式的基于气体润滑机械解耦的六维力测量装置的具体应用包括如下步骤:
步骤一(准备阶段):将六维力测量装置安放在指定位置,调节六维力测量装置底部使承载平台2处于水平状态,水平度要求优于0.1°;接入6~8个大气压的低压气源,气浮轴承4-2处于工作状态,检验气浮轴承是否工作正常;调节水平力测量系统5中的螺栓调整垫板5-3位置,夹紧上面板4-1,最终测力传感器5-1采集力信息要大于要求的预紧力,并检验水平力测量系统5是否工作正常;检验称重测量系统3是否工作正常,六维力测量装置准备阶段完成;
步骤二(空载测量阶段):将产品1安装固定在承载平台2上;在静置状态下,分别采集静置状态下,称重传感器和测力传感器的信息分别记录为F′
步骤三(加载测量阶段):在测量状态下,产品1将受外界的六维力,称重传感器和测力传感器的力信息将发生变化,传感器的信息分别记录为F″
步骤四(测量结束阶段):在测量完成后,将产品1从承载平台2上拆卸下来;将气源断开,气浮轴承4-2处于非工作状态,平时存放需避免油渍、水渍等污染;调节螺杆5-4的螺栓调整垫板5-3的位置,使测力传感器5-1处于松弛状态,即传感器无测量信息,平时存放传感器受拉力或压力将影响测力传感器使用寿命;断开传感器的电源,测量结束。
本实施方式的称重传感器和测力传感器5-1具体布局如图2所示,但不只限于此种布局,其中,称重测量系统3中采用4个称重传感器,4个称重传感器与其所在平面内的称重测量坐标系的两个坐标轴的距离为a,每个水平测量系统4中采用2个测力传感器,每个水平力测量系统5的2个测力传感器5-1与其所在平面内的水平测量坐标系的一个坐标轴的距离均为b,整个系统共包含12个传感器。
如图5和6所示,在空载测量阶段,称重传感器和测力传感器采集的空载力信息分别记为:F′
根据传感器的布局,如图6所示,在称重测量坐标系下,t时刻纵向力和力矩可为:F
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
- 基于气体润滑机械解耦的六维力测量装置
- 一种基于差动结构的机械式力测量与力加载装置