车辆的控制装置
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及车辆的控制装置。
背景技术
以往,已知搭载发动机和电机作为动力源的混合动力车辆。在这样的混合动力车辆中,将从作为蓄电装置的蓄电池供给的直流电力由变换器(inverter)转换成交流电力后向电机供给,从而驱动电机。另外,已知:在为了驱动电机而由变换器将直流电力转换成交流电力时,以预定的开关频率来控制设置于变换器的多个开关元件的接通和断开的切换,由此会产生与开关频率相应的纹波电流。在该纹波电流向例如电连接蓄电池和变换器的电路内的电容器供给时,电容器会发热。尤其是,开关频率依赖于电机的转速,所以,在根据电机的工作状态而使得在电容器的谐振频带包含开关频率时,向电容器供给的纹波电流因谐振而增大,从而电容器的发热量增大。
日本特开平06-178550公开了如下的技术:根据指示电流与测定电流的误差来推定纹波电流,在纹波电流为预定值以上的情况下,改变VVVF(Variable Voltage VariableFrequency,变压变频)变换器的载波频率(开关频率)而使纹波电流减少。
发明内容
作为混合动力车辆,已知搭载了发动机、作为发电用旋转电机的发电电机和作为驱动用旋转电机的驱动电机的串联方式的混合动力车辆。在该串联方式的混合动力车辆中,例如,由发动机的输出驱动发电电机而对蓄电池进行充电,并且由来自蓄电池的电力驱动驱动电机而使车辆行驶。另外,在串联方式的混合动力车辆中,将由发电电机发电的交流电力转换成直流电力而向蓄电池供给的发电用变换器、以及将来自蓄电池的直流电力转换成交流电力而向驱动电机供给的驱动用变换器经由共用的电路而与蓄电池电连接。
但是,在串联方式的混合动力车辆中,在同时驱动发电电机和驱动电机时,会产生与发电用变换器的开关频率相应的纹波电流和与驱动用变换器的开关频率相应的纹波电流。因此,由于向设置于共用的电路的单一电容器供给双方的纹波电流,会产生电容器的发热量比向电容器仅供给任一方的纹波电流时增大的问题。尤其是,在电容器的谐振频带包含发电用变换器和驱动用变换器各自的开关频率时,上述问题变得更加显著。此外,在发电电机与驱动电机之间进行电力的授受的蓄电池中也存在因纹波电流而使得发热量增大的问题。
本发明提供一种车辆的控制装置,在同时驱动发电用旋转电机和驱动用旋转电机时能够降低因纹波电流所导致的电路的构成要素的发热。
本发明的一个方案涉及一种控制装置,搭载于如下车辆,所述车辆具有发动机、由来自所述发动机的驱动力发电的发电用的第1旋转电机、输出驱动车轮的驱动力的驱动用的第2旋转电机、蓄电装置、在所述第1旋转电机与所述蓄电装置之间进行电力的变换的发电用的第1变换器、在所述第2旋转电机与所述蓄电装置之间进行电力的变换的驱动用的第2变换器、以及将所述第1变换器和所述第2变换器均与所述蓄电装置电连接并至少设有电容器的电路。该控制装置实施所述第1旋转电机和所述第2旋转电机的驱动控制。该控制装置具有驱动控制改变装置,该驱动控制改变装置构成为,在根据所述第1旋转电机的工作状态而产生的发电侧纹波电流和根据所述第2旋转电机的工作状态而产生的驱动侧纹波电流的合计值为预先设定的阈值以上的情况下,改变所述第1旋转电机和所述第2旋转电机的至少一方的驱动控制以使所述合计值减少。
在本发明的上述方案的控制装置中,由驱动控制改变装置改变发电用的第1旋转电机和驱动用的第2旋转电机的至少一方的驱动控制以使所述合计值减少。由此,在控制装置中,能够使发电侧纹波电流和驱动侧纹波电流的至少一方降低,能够使发电侧纹波电流和驱动侧纹波电流的合计值减少。由此,本发明的控制装置在同时驱动第1旋转电机和第2旋转电机时,能够降低纹波电流的发热。
另外,在上述控制装置中可以是,所述驱动控制改变装置构成为,在所述合计值为所述阈值以上的情况下,改变所述第1旋转电机的驱动控制以使所述合计值减少。
由此,既能够抑制改变驱动用的第2旋转电机的驱动控制而给车辆的行驶带来影响的问题,又能够使发电侧纹波电流和驱动侧纹波电流的合计值减少。
另外,在上述控制装置中可以是,所述驱动控制改变装置能够根据所述第1旋转电机的转速,将所述第1变换器的开关控制的控制模式有选择地改变为矩形波控制模式和脉冲宽度调制控制模式中的某一方;所述驱动控制改变装置能够根据所述第2旋转电机的转速,将所述第2变换器的开关控制的控制模式有选择地改变为所述矩形波控制模式和所述脉冲宽度调制控制模式中的某一方;在所述第1变换器和所述第2变换器均由相同的控制模式开关控制的情况下,所述驱动控制改变装置以使得所述第1变换器的开关控制中的控制模式和所述第2变换器的开关控制中的控制模式不一致的方式改变所述第1变换器的开关控制中的控制模式和所述第2变换器的开关控制中的控制模式中的某一方。
由此,使依赖于第1旋转电机的转速的第1变换器的开关频率或依赖于第2旋转电机的转速的第2变换器的开关频率变化,能够抑制谐振所导致的发电侧纹波电流或驱动侧纹波电流的增大,能够使发电侧纹波电流和驱动侧纹波电流的合计值减少。
另外,在上述控制装置中可以是,所述驱动控制改变装置构成为,在所述第1变换器和所述第2变换器均由所述矩形波控制模式开关控制的情况下,将所述第1变换器的开关控制的控制模式改变为所述脉冲宽度调制控制模式;所述驱动控制改变装置在所述第1变换器和所述第2变换器均由所述脉冲宽度调制控制模式开关控制的情况下,将所述第1变换器的开关控制的控制模式改变为所述矩形波控制模式。
由此,既能够抑制改变驱动用的第2旋转电机的驱动控制而给车辆的行驶带来影响的问题,又能够使依赖于第1旋转电机的转速的第1变换器的开关频率变化,抑制谐振所导致的发电侧纹波电流的增大,使发电侧纹波电流和驱动侧纹波电流的合计值减少。
另外,在上述控制装置中可以是,所述驱动控制改变装置构成为,在所述蓄电装置的剩余容量小于一定值的情况下,仅改变所述第2旋转电机的驱动控制以使所述合计值减少。
由此,既能够抑制由于来自第2旋转电机的驱动力而使车辆行驶所需的蓄电装置的剩余容量不足,又能够使发电侧纹波电流和驱动侧纹波电流的合计值减少。
另外,在上述控制装置中可以是,所述驱动控制改变装置构成为,以使得抑制驱动力的方式改变所述第2旋转电机的工作点。
由此,能够抑制由于来自第2旋转电机的驱动力而使车辆行驶所需的蓄电装置的剩余容量不足。
另外,在上述控制装置中可以是,所述驱动控制改变装置构成为,使所述第1旋转电机的驱动控制的改变优先于所述第2旋转电机的驱动控制的改变。
由此,能够抑制驱动控制的改变给车辆的行驶带来影响。
另外,上述控制装置可以具有:存储装置,该存储装置构成为,存储示出了所述第1旋转电机的工作点与所述发电侧纹波电流的关系的发电侧映射、以及示出了所述第2旋转电机的工作点与所述驱动侧纹波电流的关系的驱动侧映射;以及推定装置,该推定装置基于所述第1旋转电机的工作点而根据所述发电侧映射推定所述发电侧纹波电流,基于所述第2旋转电机的工作点而根据所述驱动侧映射推定所述驱动侧纹波电流。所述驱动控制改变装置可以构成为采用所述推定装置所推定的所述发电侧纹波电流和所述驱动侧纹波电流。
由此,能够根据第1旋转电机和第2旋转电机的工作状态(工作点)、以及发电侧映射和驱动侧映射,容易地推定发电侧纹波电流和驱动侧纹波电流。另外,无需为了计测发电侧纹波电流和驱动侧纹波电流而设置专用的电流传感器,所以,能实现低成本化、省空间化。
在本发明的上述方案的控制装置中,由驱动控制改变装置改变发电用的第1旋转电机和驱动用的第2旋转电机的至少一方的驱动控制以使发电侧纹波电流和驱动侧纹波电流的合计值减少。由此,在控制装置中,能够使发电侧纹波电流和驱动侧纹波电流的至少一方降低,使发电侧纹波电流和驱动侧纹波电流的合计值减少。由此,本发明的控制装置起到在同时驱动发电用旋转电机和驱动用旋转电机时能够使因纹波电流所导致的发热降低的效果。
附图说明
以下,将参照附图对本发明的示例性的实施例的特征、优点以及技术和产业的意义进行描述,其中,用相似的标号表示相似的要素。
图1是表示实施方式的混合动力车辆的构成的示意图。
图2是表示发电电机的工作点与发电用变换器的开关控制模式的对应关系的图。
图3是表示驱动电机的工作点与驱动用变换器的开关控制模式的对应关系的图。
图4是表示蓄电池的谐振频率的图表。
图5是表示电容器的谐振频率的图表。
图6是表示示出了发电电机的工作点与蓄电池的纹波电流的对应关系的发电侧映射的图。
图7是表示示出了驱动电机的工作点与蓄电池的纹波电流的对应关系的驱动侧映射的图。
图8是表示示出了发电电机的工作点与电容器的纹波电流的对应关系的发电侧映射的图。
图9是表示示出了驱动电机的工作点与电容器的纹波电流的对应关系的驱动侧映射的图。
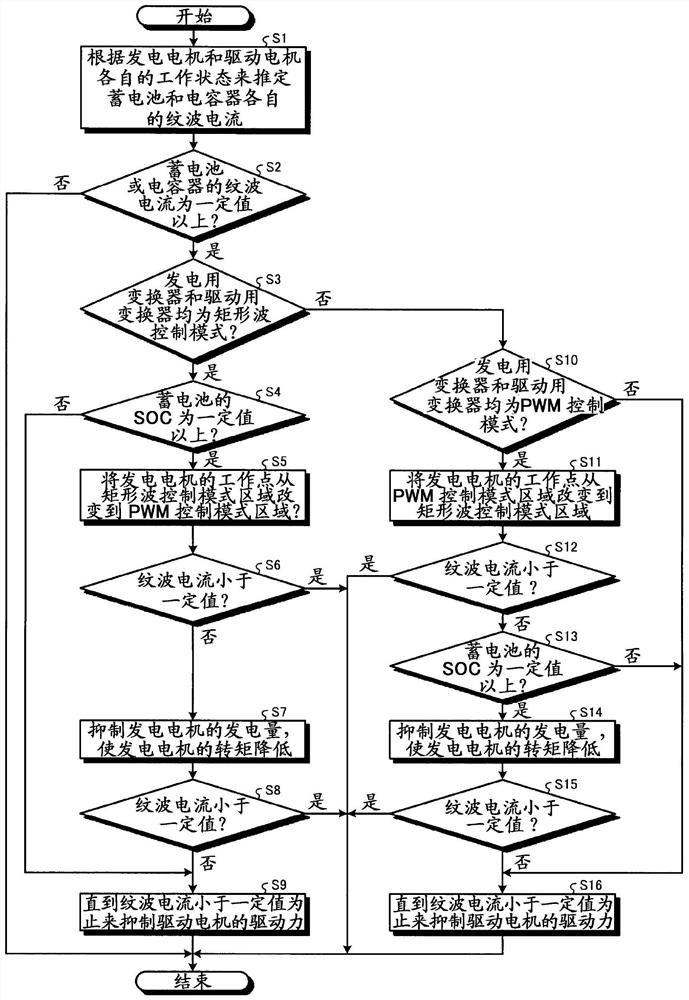
图10是表示实施方式的混合动力车辆的HVECU所实施的控制的一个例子的流程图。
图11是表示工作点位于矩形波控制模式区域时的发电电机的工作点映射的图。
图12是表示工作点位于矩形波控制模式区域时的驱动电机的工作点映射的图。
图13是表示工作点位于PWM控制模式区域时的发电电机的工作点映射的图。
图14是表示工作点位于PWM控制模式区域时的驱动电机的工作点映射的图。
图15是表示实施方式的混合动力车辆的构成的其它例子的示意图。
具体实施方式
以下,对本发明的混合动力车辆的控制装置的实施方式进行说明。此外,本发明并非由本实施方式来限定。
图1表示实施方式的混合动力车辆1的构成。如图1所示,实施方式的混合动力车辆1由所谓的串联混合动力机动车构成,即,在发动机2的输出轴连接作为发电用的电机的发电电机MG1并在连结于驱动轮3a、3b的驱动轴4连接作为行驶用的电机的驱动电机MG2。详细地说,混合动力车辆1具有发动机2、发电电机MG1、驱动电机MG2、发电用变换器5a、驱动用变换器5b、蓄电池6和混合动力车辆用电子控制单元(以下,记作HVECU(Hybrid VehicleElectronic Control Unit))7作为主要的构成要素。
发动机2由将汽油、轻油(柴油)等作为燃料来输出动力的内燃机构成。发动机2由发动机用电子控制单元(以下,记作发动机ECU)21控制运转。发动机ECU21由微处理器构成,具有CPU(Central Processing Unit,中央处理单元)、存储控制程序的ROM(Read OnlyMemory,只读存储器)、暂时存储数据的RAM(Random Access Memory,随机存取存储器)、输入输出端口、以及通信端口等。发动机ECU21经由通信端口而与HVECU7相连。
发电电机MG1由同步发电电动机构成,转子与发动机2的输出轴相连。驱动电机MG2由同步发电电动机构成,转子与驱动轴4相连。发电用变换器5a和驱动用变换器5b与发电电机MG1和驱动电机MG2相连,并经由设有电力线51、发电侧的平滑用的电容器52a、驱动侧的平滑用的电容器52b、系统主继电装置53和电抗器54等的共用的电路而与蓄电池6电连接。在电力线51串联连接着电抗器54。此外,在以下的说明中,在不特别区分电容器52a和电容器52b时,仅记载为电容器52。发电电机MG1和驱动电机MG2通过由电机用电子控制单元(以下,记作电机ECU)31对发电用变换器5a和驱动用变换器5b所具有的多个开关元件进行开关控制而被驱动旋转。电机ECU31由与发动机ECU21同样的微处理器构成。电机ECU31经由通信端口而与HVECU7相连。
蓄电池6由锂离子二次电池、镍氢二次电池构成,并经由电力线51而与发电用变换器5a和驱动用变换器5b相连。蓄电池6由蓄电池用电子控制单元(以下,记作蓄电池ECU)61管理。蓄电池ECU61由与发动机ECU21同样的微处理器构成。蓄电池ECU61经由通信端口而与HVECU7相连。用于管理蓄电池6的信号从各种传感器输入蓄电池ECU61。作为输入蓄电池ECU61的信号,例如能够举出来自未图示的电压传感器的与蓄电池6的电压相关的信号、来自未图示的电流传感器的与蓄电池6的电流相关的信号等。蓄电池ECU61基于来自上述电流传感器的蓄电池6的电流的累计值等来运算蓄电池6的剩余容量(以下,称为SOC(State OfCharge,充电状态))。
HVECU7由与发动机ECU21同样的微处理器构成。来自各种传感器的信号经由输入口而输入HVECU7。作为输入HVECU7的信号,能够例示出来自点火开关71的点火信号、来自检测发动机2的转速的发动机转速传感器72的发动机转速信号、来自检测加速踏板的踏入量的加速踏板位置传感器73的加速开度信号、来自检测制动踏板的踏入量的制动踏板位置传感器74的制动踏板位置信号、来自车速传感器75的车速信号等。HVECU7经由通信端口而与发动机ECU21、电机ECU31和蓄电池ECU61相连。
在实施方式的混合动力车辆1中,根据发电电机MG1的转速,将对设置于发电用变换器5a的多个开关元件的接通和断开进行切换的开关控制有选择地改变为PWM(PulseWidth Modulation,脉冲宽度调制)控制模式(脉冲宽度控制模式)和矩形波控制模式中的某一方。
在PWM控制模式下,进行正弦波PWM控制和过调PWM控制中的某一方的控制。正弦波PWM控制作为一般的PWM控制方式而被采用,按照正弦波状的电压指令值和载波(载波信号)的电压比较来控制发电用变换器5a的各相臂中的开关元件的接通和断开的切换。结果,在一定期间内从发电用变换器5a向发电电机MG1输出的电压的基本波成分成为准正弦波。过调PWM控制在使载波(载波信号)的振幅缩小地变形后进行与上述正弦波PWM控制同样的PWM控制。在进行PWM控制的区域,在发电电机MG1的转速较低的情况下,进行正弦波PWM控制,在发电电机MG1的转速较高的情况下,进行过调PWM控制。
在矩形波控制模式下,进行矩形波控制。在矩形波控制下,在上述一定期间内以1次的步调进行开关控制。结果,在上述一定期间内从发电用变换器5a向发电电机MG1输出的电压成为1个脉冲量的矩形波电压。由此,矩形波控制的控制精度(控制响应性)不及PWM控制,但相比PWM控制模式能够提高调制率,能提高电机输出。
并且,在实施方式的混合动力车辆1中,考虑PWM控制模式和矩形波控制模式各自的特性的不同,电机ECU31根据由发电电机MG1的转速和发电电机MG1的转矩所决定的发电电机MG1的工作点所属的区域来选择PWM控制模式和矩形波控制模式。
图2表示发电电机MG1的工作点与发电用变换器5a的开关控制模式的对应关系。在图2中,横轴表示发电电机MG1的转速,纵轴表示发电电机MG1的转矩。电机ECU31在发电电机MG1的工作点位于比图2所示的控制边界线L1靠低转速侧的PWM控制模式区域A1的情况下,为了减小转矩变动而选择控制性较好的PWM控制模式。另外,电机ECU31在发电电机MG1的工作点位于比控制边界线L1靠高转速侧的矩形波控制模式区域A2的情况下,为了提高发电电机MG1的输出而选择矩形波控制模式。
另外,在实施方式的混合动力车辆1中,驱动用变换器5b的开关控制模式也与发电用变换器5a的开关控制模式同样地,由电机ECU31根据驱动电机MG2的转速,有选择地改变为PWM控制模式和矩形波控制模式中的某一方。也就是说,电机ECU31根据由驱动电机MG2的转速和驱动电机MG2的转矩所决定的驱动电机MG2的工作点所属的区域来选择驱动用变换器5b的开关控制模式。
图3是表示驱动电机MG2的工作点与驱动用变换器5b的开关控制模式的对应关系的图。在图3中,横轴表示驱动电机MG2的转速,纵轴表示驱动电机MG2的转矩。电机ECU31在驱动电机MG2的工作点位于比图3所示的控制边界线L2靠低转速侧的PWM控制模式区域A3的情况下,选择PWM控制模式。另外,电机ECU31在驱动电机MG2的工作点位于比控制边界线L2靠高转速侧的矩形波控制模式区域A4的情况下,选择矩形波控制模式。
图4是表示蓄电池6的谐振频率的图表。如图4所示,蓄电池6存在第1谐振的第1谐振频率fb1和比第1谐振靠高频率侧的第2谐振的第2谐振频率fb2(>fb1)这2个谐振频率。另外,从图4可知,第1谐振的增益比1倍高,第2谐振的增益比1倍低。此外,图4中带阴影线的区域是蓄电池6中能产生第1谐振的第1谐振频带。
图5是表示电容器52的谐振频率的图表。如图5所示,电容器52存在第1谐振的第1谐振频率fc1和第2谐振的第2谐振频率fc2(>fc1)这2个谐振频率。另外,从图5可知,第1谐振频率fc1的增益比1倍低,第2谐振频率fc2的增益比1倍高。此外,图5中带阴影线的区域是电容器52中能产生第2谐振的第2谐振频带。
如图4和图5所示,蓄电池6和电容器52分别存在第1谐振和第2谐振这2个谐振频率,但在蓄电池6与电容器52,各自的第1谐振和第2谐振的增益的倾向不同。
并且,在本实施方式中,在发电用变换器5a和驱动用变换器5b分别由矩形波控制模式开关控制的情况下,发电用变换器5a和驱动用变换器5b各自的开关频率易于包含于第1谐振频带。另外,在本实施方式中,在发电用变换器5a和驱动用变换器5b分别由PWM控制模式开关控制的情况下,发电用变换器5a和驱动用变换器5b各自的开关频率易于包含于第2谐振频带。
因此,通过发电用变换器5a和驱动用变换器5b各自的开关频率包含于图4中的蓄电池6的第1谐振频带,会产生第1谐振,蓄电池6的纹波电流显著增大。另外,若发电用变换器5a和驱动用变换器5b各自的开关频率包含于图5中的电容器52的第2谐振频带,则会产生第2谐振,电容器52的纹波电流显著增大。
在此,通过使发电用变换器5a和驱动用变换器5b各自的开关频率比蓄电池6和电容器52各自的第2谐振频带高,能避免蓄电池6和电容器52中的谐振。另一方面,在发电用变换器5a和驱动用变换器5b各自的开关元件、构成电机ECU31的微机等性能不充分的情况下,难以使开关频率比第2谐振频带高。
图6表示示出了发电电机MG1的工作点与蓄电池6的纹波电流的对应关系的发电侧映射。HVECU7具有图6所示那样的表示发电电机MG1的工作点与蓄电池6的纹波电流的对应关系的发电侧映射。在图6中,由曲线RC1~RC7划分出纹波电流量为相同程度的范围。在图6中,将纹波电流的范围阶段性地分成,在比曲线RC1靠右侧的范围,纹波电流量最多,在比曲线RC7靠左侧的范围,纹波电流量最少。从图6可知,在发电电机MG1的工作点位于矩形波控制模式区域A2内且较高转矩时,与发电电机MG1的工作状态相应的蓄电池6的纹波电流变大。
图7是表示示出了驱动电机MG2的工作点与蓄电池6的纹波电流的对应关系的驱动侧映射的图。HVECU7具有图7所示那样的表示驱动电机MG2的工作点与蓄电池6的纹波电流的对应关系的驱动侧映射。在图7中,由曲线RC8~RC13划分出纹波电流量为相同程度的范围。在图7中,将纹波电流的范围阶段性地分成,在比曲线RC8靠右侧的范围,纹波电流量最大,在比曲线RC13靠左侧的范围,纹波电流量最少。从图7可知,在驱动电机MG2的工作点位于矩形波控制模式区域A4内且较高转矩时,与驱动电机MG2的工作状态相应的蓄电池6的纹波电流变大。
图8是表示示出了发电电机MG1的工作点与电容器52的纹波电流的对应关系的发电侧映射的图。HVECU7具有图8所示那样的表示发电电机MG1的工作点与电容器52的纹波电流的对应关系的发电侧映射。在图8中,由曲线RC14~RC19划分出纹波电流量为相同程度的范围。在图8中,将纹波电流的范围阶段性地分成,在比曲线RC14靠上侧的范围,纹波电流量最多,在比曲线RC19靠下侧的范围,纹波电流量最少。从图8可知,在发电电机MG1的工作点位于PWM控制模式区域A1内且较高转矩时,与发电电机MG1的工作状态相应的电容器52的纹波电流变大。
图9是表示示出了驱动电机MG2的工作点与电容器52的纹波电流的对应关系的驱动侧映射的图。HVECU7具有图9所示那样的表示驱动电机MG2的工作点与电容器52的纹波电流的对应关系的驱动侧映射。在图9中,由曲线RC20~RC26划分出纹波电流量为相同程度的范围。在图9中,将纹波电流的范围阶段性地分成,在比曲线RC20靠上侧的范围,纹波电流量最多,在比曲线RC26靠下侧的范围,纹波电流量最少。从图9可知,在驱动电机MG2的工作点位于PWM控制模式区域A3内且较高转矩时,与驱动电机MG2的工作状态相应的电容器52的纹波电流变大。
在本实施方式中,预先通过实验等求出图6~图9所示的与蓄电池6和电容器52分别相对应的发电侧映射和驱动侧映射,并保存于设置于HVECU7的ROM等。并且,HVECU7作为推定装置而发挥作用,即,基于发电电机MG1的工作点而根据各发电侧映射推定蓄电池6和电容器52中的发电侧纹波电流,基于驱动电机MG2的工作点而根据各驱动侧映射推定蓄电池6和电容器52中的驱动侧纹波电流。由此,能够根据发电电机MG1和驱动电机MG2的工作状态(工作点)、以及发电侧映射和驱动侧映射,容易地推定发电侧纹波电流和驱动侧纹波电流。另外,无需为了计测发电侧纹波电流和驱动侧纹波电流而设置专用的电流传感器,所以,能实现低成本化、省空间化。此外,上述推定装置也可以设为另外于HVECU7的控制部。并且,在本实施方式中,利用采用了发电侧映射和驱动侧映射来推定的发电侧纹波电流和驱动侧纹波电流,HVECU7改变发电电机MG1和驱动电机MG2的至少一方的驱动控制以使发电侧纹波电流和驱动侧纹波电流的合计值减少。
图10是表示实施方式的混合动力车辆1的HVECU7所实施的控制的一个例子的流程图。
首先,HVECU7根据发电电机MG1和驱动电机MG2各自的工作状态来推定蓄电池6和电容器52各自的纹波电流(步骤S1)。例如,作为如图6~图9所示那样的映射,具有发电电机MG1和驱动电机MG2各自的工作点与蓄电池6和电容器52各自的纹波电流的对应关系。并且,HVECU7根据发电电机MG1和驱动电机MG2各自的工作点以及上述映射,而对蓄电池6分别推定根据发电电机MG1的工作状态而产生的发电侧纹波电流和根据驱动电机MG2的工作状态而产生的驱动侧纹波电流。同样地,HVECU7根据发电电机MG1和驱动电机MG2各自的工作点以及上述映射,而对电容器52分别推定根据发电电机MG1的工作状态而产生的发电侧纹波电流和根据驱动电机MG2的工作状态而产生的驱动侧纹波电流。
接着,HVECU7判断蓄电池6或电容器52的纹波电流是否为一定值以上(步骤S2)。例如,HVECU7对蓄电池6判断发电侧纹波电流和驱动侧纹波电流的合计值是否为预先设定的蓄电池6的纹波电流的阈值以上。同样地,HVECU7对电容器52判断发电侧纹波电流和驱动侧纹波电流的合计值是否为预先设定的电容器52的纹波电流的阈值以上。
在判断为蓄电池6或电容器52的纹波电流并非为一定值以上的情况下(在步骤S2中为否),HVECU7结束一系列的控制。另一方面,在判断为蓄电池6或电容器52的纹波电流为一定值以上的情况下(在步骤S2中为是),HVECU7判断发电用变换器5a和驱动用变换器5b是否均为矩形波控制模式(步骤S3)。例如,HVECU7判断是否如图11所示发电电机MG1的工作点P1位于矩形波控制模式区域A2,是否如图12所示驱动电机MG2的工作点P4位于矩形波控制模式区域A4。
在判断为发电用变换器5a和驱动用变换器5b均为矩形波控制模式的情况下(在步骤S3中为是),HVECU7判断蓄电池6的SOC是否为一定值以上(步骤S4)。在判断为蓄电池6的SOC为一定值以上的情况下(在步骤S4中为是),即使发电电机MG1的发电量变化,混合动力车辆1的行驶也不会有问题,所以,HVECU7将发电电机MG1的工作点从矩形波控制模式区域改变成PWM控制模式区域(步骤S5)。例如图11所示,HVECU7将位于矩形波控制模式区域A2的发电电机MG1的工作点P1沿着等功率曲线L3改变为位于PWM控制模式区域A1的工作点P2。
在此,在发电用变换器5a和驱动用变换器5b均为矩形波控制模式的情况下,发电用变换器5a和驱动用变换器5b各自的开关频率包含于蓄电池6的第1谐振频带,蓄电池6的纹波电流(发电侧纹波量和驱动侧纹波量的合计值)为一定值以上的可能性高。因此,HVECU7通过将位于矩形波控制模式区域A2的发电电机MG1的工作点P1改变为位于PWM控制模式区域A1的工作点P2,来改变发电用变换器5a的开关频率、使得不包含于蓄电池6的第1谐振频带。由此,既能抑制改变驱动电机MG2的驱动控制(开关控制模式)而使从驱动电机MG2输出的驱动力变化而给混合动力车辆1的行驶带来影响的问题,又能抑制谐振所导致的发电侧纹波电流的增大,与使发电电机MG1在工作点P1工作的情况相比,能使发电侧纹波电流减少,能使蓄电池6的纹波电流减少。
接着,HVECU7例如进行与步骤S1的处理和步骤S2的处理同样的处理来判断蓄电池6和电容器52各自的纹波电流是否小于一定值(步骤S6)。在判断为蓄电池6和电容器52各自的纹波电流小于一定值的情况下(在步骤S6中为是),HVECU7结束一系列的控制。
在步骤S6中判断为蓄电池6和电容器52的纹波电流并非小于一定值的情况下(在步骤S6中为否),HVECU7抑制发电电机MG1的发电量而使发电电机MG1的转矩降低(步骤S7)。例如,HVECU7如图11所示,不使转速变化地降低转矩而使位于PWM控制模式区域A1的发电电机MG1的工作点P2改变为工作点P3。由此,与使发电电机MG1在工作点P2工作的情况相比,能与发电电机MG1的发电量降低的量相应地使发电侧纹波电流减少,能使蓄电池6和电容器52各自的纹波电流减少。
接着,HVECU7例如进行与步骤S1的处理和步骤S2的处理同样的处理来判断蓄电池6和电容器52各自的纹波电流是否小于一定值(步骤S8)。在判断为蓄电池6和电容器52各自的纹波电流小于一定值的情况下(在步骤S8中为是),HVECU7结束一系列的控制。另一方面,在步骤S8中判断为蓄电池6和电容器52各自的纹波电流并非小于一定值的情况下(在步骤S8中为否),HVECU7改变驱动电机MG2的工作点来抑制驱动力直到蓄电池6和电容器52各自的纹波电流小于一定值为止(步骤S9),然后结束一系列的控制。
另外,在步骤S4中判断为蓄电池6的SOC并非为一定值以上的情况下(在步骤S4中为否),HVECU7改变驱动电机MG2的工作点来抑制驱动力直到蓄电池6和电容器52各自的纹波电流小于一定值为止(步骤S9),然后结束一系列的控制。
另外,在步骤S3中判断为发电电机MG1和驱动电机MG2的至少一方并非为矩形波控制模式的情况下(在步骤S3中为否),HVECU7判断发电电机MG1和驱动电机MG2是否均为PWM控制模式(步骤S10)。例如,HVECU7判断是否如图13所示发电电机MG1的工作点P5位于PWM控制模式区域A1,是否如图14所示驱动电机MG2的工作点P8位于PWM控制模式区域A3。
在判断为发电用变换器5a和驱动用变换器5b均为PWM控制模式的情况下(在步骤S10中为是),HVECU7将发电电机MG1的工作点从PWM控制模式区域改变成矩形波控制模式区域(步骤S11)。例如图13所示,将位于PWM控制模式区域A1的发电电机MG1的工作点P5沿着等功率曲线L4改变为位于矩形波控制模式区域A2的工作点P6。
在此,在发电用变换器5a和驱动用变换器5b均为PWM控制模式的情况下,发电用变换器5a和驱动用变换器5b各自的开关频率包含于电容器52的第2谐振频带,电容器52的纹波电流(发电侧纹波量和驱动侧纹波量的合计值)为一定值以上的可能性高。因此,HVECU7通过将位于PWM控制模式区域A1的发电电机MG1的工作点P5改变为位于矩形波控制模式区域A2的工作点P6,来改变发电用变换器5a的开关频率,使得包含于电容器52的第2谐振频带。由此,与使发电电机MG1在工作点P5工作的情况相比,能使发电侧纹波电流减少,能使电容器52的纹波电流减少。
接着,HVECU7例如进行与步骤S1的处理和步骤S2的处理同样的处理来判断蓄电池6和电容器52各自的纹波电流是否小于一定值(步骤S12)。在判断为蓄电池6和电容器52各自的纹波电流小于一定值的情况下(在步骤S12中为是),HVECU7结束一系列的控制。
在步骤S12中判断为蓄电池6和电容器52的纹波电流并非小于一定值的情况下(在步骤S12中为否),HVECU7判断蓄电池6的SOC是否为一定值以上(步骤S13)。在判断为蓄电池6的SOC为一定值以上的情况下(在步骤S13中为是),HVECU7抑制发电电机MG1的发电量而使发电电机MG1的转矩降低(步骤S14)。例如图13所示,不使转速变化地降低转矩而使位于矩形波控制模式区域A2的发电电机MG1的工作点P6改变为工作点P7。由此,与使发电电机MG1在工作点P6工作的情况相比,能与发电电机MG1的发电量降低的量相应地使发电侧纹波电流减少,能使蓄电池6和电容器52各自的纹波电流减少。
接着,HVECU7例如进行与步骤S1的处理和步骤S2的处理同样的处理来判断蓄电池6和电容器52各自的纹波电流是否小于一定值(步骤S15)。在判断为蓄电池6和电容器52各自的纹波电流小于一定值的情况下(在步骤S15中为是),HVECU7结束一系列的控制。另一方面,在步骤S15中判断为蓄电池6和电容器52各自的纹波电流并非小于一定值的情况下(在步骤S15中为否),HVECU7改变驱动电机MG2的工作点来抑制驱动力直到蓄电池6和电容器52各自的纹波电流小于一定值为止(步骤S16),然后结束一系列的控制。由此,通过使依赖于驱动电机MG2的转速的驱动用变换器5b的开关频率变化、或者降低驱动电机MG2的转矩而使向驱动电机MG2供给的电力减少,能使驱动侧纹波电流减少,能使蓄电池6和电容器52各自的纹波电流减少。
另外,在步骤S13中判断为蓄电池6的SOC并非为一定值以上的情况下(在步骤S13中为否),HVECU7改变驱动电机MG2的工作点来抑制驱动力直到蓄电池6和电容器52各自的纹波电流小于一定值为止(步骤S16),然后结束一系列的控制。由此,既能够由来自驱动电机MG2的驱动力来抑制混合动力车辆1行驶所需的蓄电池6的SOC不足,又能够使蓄电池6和电容器52各自的纹波电流小于一定值。
另外,在步骤S10中判断为发电用变换器5a和驱动用变换器5b中的一方为矩形波控制模式而另一方为PWM控制模式的情况下(在步骤S10中为否),HVECU7改变驱动电机MG2的工作点来抑制驱动力直到蓄电池6和电容器52各自的纹波电流小于一定值为止(步骤S16),然后结束一系列的控制。
如上所述,实施方式的车辆的控制装置所含的HVECU7在同时驱动发电电机MG1和驱动电机MG2时蓄电池6和电容器52各自的纹波电流为一定值以上的情况下,改变发电电机MG1和驱动电机MG2的至少一方的驱动控制。由此,在实施方式的HVECU7中,在同时驱动发电电机MG1和驱动电机MG2时,能够使蓄电池6和电容器52各自的纹波电流减少,能够使蓄电池6和电容器52的发热降低。
此外,在本实施方式中,也可以设置检测蓄电池6和电容器52各自的纹波电流(发电侧纹波电流和驱动侧纹波电流的合计值)的电流传感器。HVECU7可以基于上述电流传感器的检测结果,在蓄电池6和电容器52各自的纹波电流为一定值以上的情况下,改变发电电机MG1和驱动电机MG2的至少一方的驱动控制。由此,与推定蓄电池6和电容器52的发电侧纹波电流和驱动侧纹波电流的情况相比,HVECU7能够更高精度地把握蓄电池6和电容器52各自的纹波电流。
此外,作为实施方式的混合动力车辆1的构成,不限于图1所示那样在发电侧和驱动侧分别设置平滑用的电容器52a、52b,例如图15所示,也可以将平滑用的电容器52并联连接于电力线51而在发电侧和驱动侧采用单一的电容器52。即使是图15所示的混合动力车辆1的构成,HVECU7通过实施例如图10的流程图所示的控制,在同时驱动发电电机MG1和驱动电机MG2时,能够使蓄电池6和电容器52各自的纹波电流减少,能够使蓄电池6和电容器52的发热降低。
- 车辆用图像获取装置、控制装置、包括了车辆用图像获取装置或控制装置的车辆和车辆用图像获取方法
- 车辆用图像获取装置、控制装置、包括了车辆用图像获取装置或控制装置的车辆和车辆用图像获取方法