一种底盘及包括该底盘的视觉机器人
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及机器人,更具体的说是一种底盘及包括该底盘的视觉机器人。
背景技术
例如公开号为CN209190764U一种轨道式视觉机器人,包括C型导轨,所述C型导轨的内部底侧设有相互平行的两条滚轮槽,相互平行的两条滚轮槽相互靠近的一侧均设有条形滑槽,相互平行的两条滚轮槽内部滚动均连接有滚轮,两个滚轮相互靠近的一侧均设有环形滑槽,两个环形滑槽的内部一侧设有定位槽,环形滑槽和条形滑槽之间通过连接滑块连接,所述连接滑块的上表面输设有定位柱,所述定位柱与定位槽对应,两个滚轮相互靠近的一侧设有转轴,所述转轴的侧面中部设有锥形齿轮二,所述锥形齿轮二啮合有锥形齿轮一,该轨道式视觉机器人,可以防止轨道式视觉机器人发生脱轨,避免视觉机器人的损坏,进而减少了维修成本,不影响视觉机器人正常的工作;但该视觉机器人不便于检查在流水线上的壳体内部情况。
发明内容
本发明的目的是提供一种底盘及包括该底盘的视觉机器人,可以便于检查在流水线上的壳体内部情况。
本发明的目的通过以下技术方案来实现:
一种底盘,包括框架和四个轮Ⅰ,所述轮Ⅰ突出于框架的上方进行安装,四个轮Ⅰ的处于一个虚拟的矩形的四角,任意两个相邻的轮Ⅰ之间的间距能够调节。
所述框架包括均两两对称设置的载梁和载轨Ⅰ,载梁和载轨Ⅰ依次固接组成矩结构,载轨Ⅰ上设有槽道Ⅰ;
所述底盘还包括载轮器,所述载轮器设有两个,载轮器的两端能够分别滑动连接在两个载轨Ⅰ上的槽道Ⅰ内,所述四个轮Ⅰ均分设置在两个载轮器上;每个载轮器能够调节自身上的两个轮Ⅰ之间的间距。
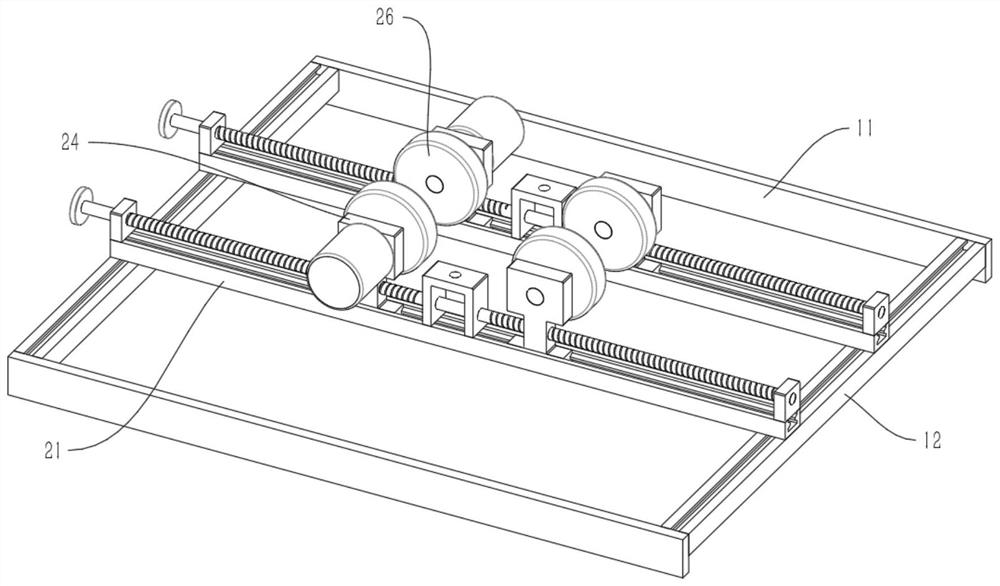
所述载轮器包括伸缩机构、载轨Ⅱ、轴承座、双向丝杠、轮座、轴Ⅰ和滑块,载轨Ⅱ上设有槽道Ⅱ,载轨Ⅱ下部的两端各固接一个能够与所述槽道Ⅰ配合的导块,载轨Ⅱ上部的两端各固接一个轴承座,轴承座用于双向丝杠两端的转动连接,轮座设有两个,轮座上转动连接有轴Ⅰ的外端,轮座的下端一体连接滑块,滑块滑动连接在所述槽道Ⅱ内,载轨Ⅱ的两端通过导块滑动连接在载轨Ⅰ上的槽道Ⅰ内,伸缩机构安装在载梁上,伸缩机构的活动端与载轨Ⅱ固接;四个轮Ⅰ分别固接在四个轴Ⅰ的内端。
所述载轮器还包括基架和两个能够互相卡合和分离的卡部,其中一个卡部能够相对于基架在纵向上调节,另外一个卡部固接在双向丝杠的中部,基架固接在载轨Ⅱ上端的中部,双向丝杠穿过或转动连接在基架上。
双向丝杠上的卡部为卡套,卡套周向上均匀设有齿槽,卡头为另外一个卡部,卡头的上端转动连接有螺杆的下端,螺杆螺纹连接在基架的上部。
本发明一种底盘及包括该底盘的视觉机器人的有益效果为:
通过可以在吊顶式的轨道或地面上行走的底盘使得视觉机器人根据实际操作环境检查流水线上壳体内部的情况;视觉机器人便于在圆周范围内检查壳体内情况,便于定子的安装。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
图1以立体图示意性显示了本发明的整体结构;
图2以立体图示意性显示了本发明的第一部分结构;
图3以立体图示意性显示了本发明的第二部分结构;
图4以立体图示意性显示了本发明的第三部分结构;
图5以立体图示意性显示了本发明的第四部分结构;
图6以立体图示意性显示了本发明的第五部分结构;
图7以立体图示意性显示了本发明的第六部分结构;
图8以立体图示意性显示了本发明的第七部分结构;
图9以立体图示意性显示了本发明的第八部分结构;
图10以立体图示意性显示了本发明的第九部分结构;
图11以立体图示意性显示了本发明的第十部分结构。
图中:载梁11;
载轨Ⅰ12;
伸缩机构13;
载轨Ⅱ21;
轴承座22;
双向丝杠23;
轮座24;
轴Ⅰ25;
轮Ⅰ26;
滑块27;
卡套28;
卡头29;
螺杆210;
基架211;
基座31;
轴Ⅱ32;
调节座33;
轴Ⅲ34;
杆臂35;
轮Ⅱ36;
连接架41;
减速电机42;
调节悬臂51;
丝杠52;
手块53;
指管54;
轴四55。
具体实施方式
容易理解,根据本发明的技术方案,在不变更本发明实质精神下,本领域的一般技术人员可以提出可相互替换的多种结构方式以及实现方式。因此,以下具体实施方式以及附图仅是对本发明的技术方案的示例性说明,而不应当视为本发明的全部或者视为对本发明技术方案的限定或限制。
在本说明书中提到或者可能提到的上、下、左、右、前、后、正面、背面、顶部、底部等方位用语是相对于各附图中所示的构造进行定义的,它们是相对的概念,因此有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,也不应当将这些或者其他的方位用语解释为限制性用语。另外,第一、第二、第三等等类似描述用于区分而不是用于限定重要性。
下面结合附图对本发明作进一步详细说明。
该部分可以根据图1所示一个示例性的工作过程是:
当位于前后两侧的轮Ⅰ26互相靠近时,四个轮Ⅰ26所处于一个虚拟的矩形的宽边减小,进而便于将四个轮Ⅰ26安装在吊顶式的轨道上,所述轨道可以是倒T型的结构,调节所述宽边的长度可以适配不同规格的倒T型的结构的轨道;当任意两个相邻的轮Ⅰ26互相远离时,增加四个轮Ⅰ26处于的虚拟的矩形面积,增加支撑面,可以使底盘倒置稳定行走在地面上,实现底盘在两种情形下的使用,当轮Ⅰ26外圈表面的中部设有凹槽时,轮Ⅰ26子也可以行走在地面的凸轨上,因轮Ⅰ26之间的间距可调,进而可以适配与不同间距的凸轨,轮Ⅰ26可以根据凹槽的规格储备多个,以适配不同规格的凸轨。
该部分可以根据图1、2所示一个示例性的工作过程是:
两个载轮器之间的间距可调是通过两个载轮器在槽道Ⅰ上滑动实现的,进而位于前后两侧的轮Ⅰ26的间距可以调节。因每个载轮器上的两个轮Ⅰ26的间距可以调节进而可以实现位于左右两侧的轮Ⅰ26的间距的调节。因两个载轮器上的轮Ⅰ26的间距可以进行单独调节,进而位于前/后的两个轮Ⅰ26的间距可以大于另一侧的两个轮Ⅰ26的间距,进而可以将底盘安装在弧形的倒T型的轨道上,间距小的两个轮Ⅰ26安装在倒T型的轨道的内侧,间距大的两个轮Ⅰ26安装在倒T型的轨道的外侧。
该部分可以根据图2、3、6所示一个示例性的工作过程是:
双向丝杠23左右两侧的螺纹方向相反,当转动双向丝杠23时可同步调节载轮器上的两个轮Ⅰ26的间距,即位于左右两侧的轮Ⅰ26的间距。当启动伸缩机构13时可带动与自身连接的载轮器前后运动,进而改变位于前后两侧的轮Ⅰ26的间距。参考图2,伸缩机构13可以采用电动伸缩杆,其安装位置为前后交错设置,在有限的空间内实现最大调节两个载轮器之间的间距。
该部分可以根据图3、4所示一个示例性的工作过程是:
当两个卡部卡合时用于锁死双向丝杠23,进而双向丝杠23不能进行转动,当两个卡部分离时,停止锁死双向丝杠23,双向丝杠23可以进行转动。
该部分可以根据图3、4所示一个示例性的工作过程是:
当转动螺杆210时可以使螺杆210升降,进而使卡头29脱离或卡合于卡套28,卡头29上一体连接有与齿槽配合的凸齿。因卡头29在螺杆210上可以转动,这使卡头29不会因螺杆210的转动而无法与卡套28配合。
所述双向丝杠23的边端和螺杆210的上端均安装有把手。
该部分可以根据图1、3、4所示一个示例性的工作过程是:
把手的安装位置如图所示,以便于双向丝杠23和螺杆210的转动。
其中两个在底盘运动方向上位于同侧的两个轮Ⅰ26各通过一个动力源进行驱动实现转动。
所述动力源为电动机。
该部分可以根据图1所示一个示例性的工作过程是:
将电动机安装在轮座24的外侧,不影响轮Ⅰ26在倒T型轨道上行走,两个电动机独立驱动两个轮Ⅰ26以增强动力或根据不同转速使底盘转向。
该底盘还包括增稳机构,所述增稳机构包括基座31、轴Ⅱ32、调节座33、轴Ⅲ34、杆臂35和轮Ⅱ36,基座31上转动连接有能够自锁的轴Ⅱ32,调节座33固接在轴Ⅱ32上,调节座33上转动连接有能够自锁的轴Ⅲ34,杆臂35的一端与轴Ⅲ34固接,杆臂35的另一端转动连接有轮Ⅱ36,轮Ⅱ36的轴线能够与轮Ⅰ26的轴线重合。
该部分可以根据图7、8所示一个示例性的工作过程是:
当底盘设置在倒T型的轨道上时,可以使轮Ⅱ36的轴线与轮Ⅰ26的轴线重合,然后使杆臂35绕轴Ⅲ34的轴线转动,进而使得轮Ⅱ36的高度发生改变,调节轮Ⅱ36的高度与倒T型的轨道的上方接触,进而增加行进的稳定性,所述倒T型的轨道也可以是工字型的轨道。也可以使调节座33绕轴Ⅱ32的轴线转动,进而改变轮Ⅱ36在前后方向上的位置,使轮Ⅱ36与T型的轨道或工字型的轨道中部的梁壁贴合,进而增加行进的稳定性,该轮Ⅱ36的位置改变方式使轮Ⅱ36的轴线与轮Ⅰ26的轴线在空间上交错,避免轮Ⅰ26无法与轨道上方接触时而选择的方案。轴Ⅱ32的一端支出于基座31且设有外螺纹,轴Ⅱ32的外螺纹上螺纹连接有螺母,当螺母锁紧在基座31上时实现轴Ⅱ32的自锁。
一种包括上述底盘的视觉机器人,所述指管54的一端设有微型摄像头,指管54的另一端与圆周驱动机构连接,所述圆周驱动机构安装在载梁11或载轨Ⅰ12的下部用以驱动微型摄像头的另一端做圆周运动。
该部分可以根据图10所示一个示例性的工作过程是:
当指管54做圆周运动时,其设有微型摄像头的部分的运动轨迹为一个圆形,进而便于将指管54深入待装入定子的壳体内,确定或检查定子的安装位置。
所述指管54为可挠的金属保护套管。
该部分可以根据图10、11所示一个示例性的工作过程是:
指管54可以进行弯折定型,以进行伸长缩短或改变周向运动时的范围,进而适应不同壳体内的检测范围,便于在流水线上检查。
所述驱动机构包括连接架41、减速电机42、调节悬臂51和轴Ⅳ55,连接架41固接在两个载梁11的下端,减速电机42固接在连接架41的下部,减速电机42的输出轴由上至下穿过连接架41的下部,减速电机42的输出轴与连接架41转动连接,调节悬臂51的一端固接轴Ⅳ55,轴Ⅳ55在减速电机42的输出轴上,调节悬臂51远离减速电机42的一侧安装有指管54。
该部分可以根据图9、10、11所示一个示例性的工作过程是:
启动减速电机42带动调节悬臂51绕减速电机42的输出轴转动,进而使得调节悬臂51做圆周运动,调节悬臂51带动指管54做圆周运动。
所述驱动机构还包括丝杠52和手块53,调节悬臂51的中部设有槽口,丝杠52位于所述槽口内,丝杠52的两端分别转动连接在调节悬臂51的两端,手块53螺纹连接在丝杠52上,手块53滑动连接在槽口内以实现直线运动。
该部分可以根据图10所示一个示例性的工作过程是:
转动丝杠52用于调节手块53的位置,进而改变指管54做圆周运动的半径,当底盘进行悬挂或行走在地面上时且指管54伸长至一条直线时,达到指管54下降或升高的最远位置,此时通过调节手块53改变指管54探查的范围。
本申请的技术范围不仅仅局限于上述说明中的内容,本领域技术人员可以在不脱离本申请技术思想的前提下,对上述实施方式进行多种变形和修改,而这些变形和修改均应当属于本申请的保护范围内。
- 一种底盘及包括该底盘的视觉机器人
- 柔性底盘以及包括该柔性底盘的搬运机器人