一种带有辅助站立和行走功能的轮椅
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及医疗器械技术领域,具体涉及一种带有辅助站立和行走功能的轮椅。
背景技术
目前我国有三百多万名由于各种因素造成的偏瘫患者,并且每年约有上万人丧失独立行走能力。同时,随着社会老龄化程度的不断提高,部分老年人由于疾病或者肌肉的自然萎缩,导致活动不便,丧失独立行走和站立的能力,造成行动不便老人越来越多,为家庭和社会带来了沉重的负担,因此解决老年人和各种偏瘫患者的独立行走和站立成为了社会和家庭急需解决的问题。
目前,市场上有少量可以同时实现坐姿和站姿转换和辅助行走功能相结合的轮椅设备,但这些轮椅设备的结构相当复杂,功能单一,适用性差。
发明内容
为了解决老年人和各种偏瘫患者的独立行走和站立所存在的问题,本发明提出了一种带有辅助站立和行走功能的轮椅。
本发明的具体技术方案如下:
一种带有辅助站立和行走功能的轮椅,包括轮椅本体和辅助站立行走机构,轮椅本体包括座位板,在座位板的两侧设置有扶手,在两侧扶手的前端分别设置有与辅助站立行走机构连接的卡扣,在座位板上设置有可以调整角度的椅背,轮椅本体的下方设置有轮椅底座,在轮椅底座与座位板之间设置有可以调整椅背和座位板姿态的变胞机构;变胞机构包括固定设置于座位板下方两侧的导轨,在椅背的两侧设置有滑道,第一连杆的上端通过第一滑块与滑道滑动连接,第一连杆的下端可套在导轨上并且沿着导轨滑动,第二滑块的一端与第一连杆位于导轨上的一端固定连接,第二滑块的另一端与第二连杆的一端铰接,第二连杆的另一端与第三连杆的一端铰接,第三连杆的另一端通过滑动连接在导轨上的第三滑块与第三支撑杆的上端铰接,第三支撑杆的下端与可使第三支撑杆下端前后移动的变胞驱动机构相连接,第一支撑杆的一端通过固定铰链与座位板的侧面连接,第一支撑杆的另一端和第二支撑杆的上端与导轨铰接,第二支撑杆的下端与轮椅底座铰接,第二支撑杆和第三支撑杆构成实现升降的剪式机构;辅助站立行走机构包括起支撑作用的至少三个立柱,在立柱的上端设置有上下分布的两个弧形骨架和位于弧形骨架内部上下分布且对称设置的四个手扶骨架,在上下两个手扶骨架间对称设置有卡扣杆;扶手上设置有用于控制卡扣和变胞驱动机构工作的第一按钮和第二按钮。
进一步地,变胞驱动机构包括设置于轮椅底座两侧的侧边导轨,金属制成的连接板的两端设置有可沿侧边导轨滑动的第四滑块,第三支撑杆的下端与第四滑块铰接;连接板的中间位置开设有螺纹孔,丝杠的一端通过螺纹孔与连接板连接,丝杠的另一端通过联轴器与第二电机连接。
进一步地,轮椅底座上固定设置有导向块,在导向块上设置有内螺纹孔,丝杠与导向块通过内螺纹孔相连。
进一步地,卡扣包括设置于夹板座两侧且与夹板座通过铰接杆铰接的夹板,在夹板内与铰接杆平行方向对称固定设置有摆轴,在摆轴上设置有带有内螺纹的通孔,设置于两侧夹板间的位于夹板座上的第一电机两侧的输出轴连接有驱动螺杆与摆轴带有内螺纹的通孔螺纹连接,夹板座与扶手通过卡扣臂连接。
进一步地,第一电机上设置有电磁铁,卡扣杆为铁杆,电磁铁的磁极可与卡扣杆吸合。
进一步地,第一电机设置有驱动螺杆的两侧外壳上设置有永磁体,夹板为铁制成。
进一步地,椅背的下部面向乘坐者的方向设置有用于测量乘坐者与轮椅间距离的距离传感器,在扶手上设置有控制距离传感器的第三按钮。
进一步地,距离传感器为红外距离传感器。
进一步地,各立柱的下端设置有第二万向轮,椅背的上端设置有头枕和用于调整头枕高度的头枕调整滑块,轮椅底座的前端通过合页连接有踏板。
本发明的有益效果是:
1、本发明通过在轮椅本体上设置卡扣,可以方便地实现轮椅本体与辅助站立行走机构的连接和分离。当乘坐者需要站立行走时,可通过辅助站立行走机构支撑身体,并在此时将轮椅本体与辅助站立行走机构分离。当乘坐者坐下时,可以通过卡扣将座椅本体重新与辅助站立行走机构连接。
2、通过在椅背上设置距离传感器,可以在轮椅本体与辅助站立行走机构分离时,通过距离传感器的作用使轮椅本体和乘坐者之间保持设定的距离,有助于乘坐者随时从站姿向坐姿的转换。
3、通过设置变胞机构,可以方便地实现座位板的升降和角度的变化,方便地实现椅背的角度变化,有助于实现乘坐者站姿和坐姿之间的转换。
4、通过设置头枕调整滑块,可以方便实现头枕高度的调整,以适应不同乘坐者的需求。
5、通过在卡扣中设置可与卡扣杆相吸合的电磁铁,可以在卡扣的夹板夹持卡扣杆时,通过电磁铁与卡扣杆的吸合作用使连接更加稳定。
6、通过在辅助站立行走机构的立柱下端设置第二万向轮,可以方便使用者的行走和方向的转换。
附图说明
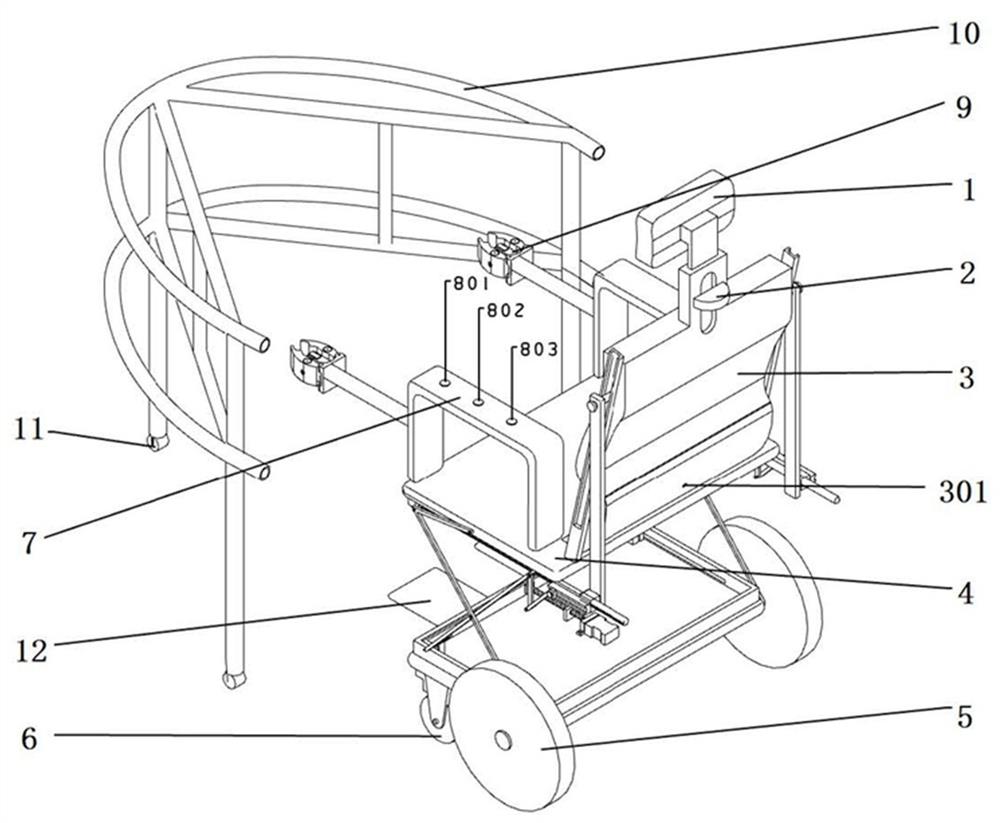
图1为本发明的整体结构示意图;
图2为本发明的轮椅本体结构示意图;
图3为本发明的辅助站立行走机构的结构示意图;
图4为本发明的卡扣结构示意图;
图5为本发明的卡扣内部结构示意图;
图6为本发明的设置于轮椅底座上的变胞驱动机构的结构示意图;
图7为图2中A处的局部结构示意图。
图中,1、头枕;2、头枕调整滑块;3、椅背;301、距离传感器;4、座位板;5、实心轮;6、第一万向轮;7、扶手;801、第一按钮;802、第二按钮;803、第三按钮;9、卡扣;901、夹板;902、摆轴;903、第一电机;904、夹板座;905、卡扣臂;906、铰接杆;907、驱动螺杆;908、永磁体;909、电磁铁;10、辅助站立行走机构;101、立柱;102、弧形骨架;103、手扶骨架;104、卡扣杆;11、第二万向轮;12、踏板;13、合页;14、第一滑块;15、第一连杆;16、导轨;17、第二滑块;18、第二连杆;19、第三连杆;20、第三滑块;21、第一支撑杆;2101、固定铰链;22、第二支撑杆;23、第三支撑杆;24、连接板;25、第四滑块;26、侧边导轨;27、丝杠;28、导向块;29、联轴器;30、第二电机;31、轮椅底座;32、滑道。
具体实施方式
下面结合附图对本发明的技术方案进行具体描述。在本申请的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或者位置关系为基于乘坐者乘坐于轮椅本体上时的方位或者位置关系。
在本发明技术方案中,除非另有明确说明,术语“安装”、“设置”、“连接”、“固定”等术语应当做广义理解,可以根据其所处的具体技术方案被理解为固定连接或可拆卸连接等,本领域的普通技术人员可根据技术方案中所涉及的具体情况理解上述术语的具体含义。
具体实施例如下:
图1、图2、图3和图7所示的一种带有辅助站立和行走功能的轮椅,包括轮椅本体和的辅助站立行走机构10。其中,轮椅本体包括座位板4,在座位板4的两侧设置有扶手7,在两侧扶手7的前端分别设置有与辅助站立行走机构连接的卡扣9,在座位板4上设置有可以调整倾斜角度的椅背3,椅背3的上端设置有头枕1和用于调整头枕高度的头枕调整滑块2,轮椅底座的前端通过可固定角度的合页13连接有踏板12,当乘坐者坐于轮椅本体上时,可以将踏板12由折叠状态放平,乘坐者的脚可置于踏板上。轮椅本体的下方设置有轮椅底座31,在轮椅底座与座位板4之间设置有可以调整椅背3和座位板4姿态的变胞机构。
变胞机构包括固定设置于座位板4下方两侧的导轨16,在椅背3的两侧设置有滑道32,第一连杆15的上端通过第一滑块14与滑道滑动连接,第一连杆15的下端可套在导轨16上并且沿着导轨滑动,第二滑块17的一端与第一连杆15位于导轨16上的一端固定连接,第二滑块17的另一端与第二连杆18的一端铰接,第二连杆18的另一端与第三连杆19的一端铰接,第三连杆19的另一端通过滑动连接在导轨16上的第三滑块20与第三支撑杆23的上端铰接,第三支撑杆23的下端与可使第三支撑杆23下端前后移动的如图6所示的变胞驱动机构相连接,第一支撑杆21的一端通过固定铰链2101与座位板4的侧面连接,第一支撑杆21的另一端和第二支撑杆22的上端与导轨16铰接,第二支撑杆22的下端与轮椅底座铰接,第二支撑杆22和第三支撑杆23构成实现升降的剪式机构。
图6所示为设置于座椅底座31的变胞驱动机构,此变胞驱动机构包括设置于轮椅底座31两侧的侧边导轨26,金属制成的连接板24的两端设置有可沿侧边导轨26滑动的第四滑块25,第三支撑杆23的下端与第四滑块25铰接,为了清楚表现,因此只示出了位于座椅底座一侧的结构,另一侧结构相同。连接板24的中间位置开设有螺纹孔,丝杠27的一端通过螺纹孔与连接板24连接,丝杠27的另一端通过联轴器29与第二电机30连接。
假设轮椅本体最初为坐姿状态,此时第二电机30带动丝杠27转动,丝杠转动即可使连接板24带动固定于连接板两端的第四滑块25以及与第四滑块25铰接的第三支撑杆23向着轮椅本体的实心轮5移动。由于第二支撑杆22和第三支撑杆23构成了剪式机构,因此与第三支撑杆23的上端相铰接的地三滑块20开始向轮椅本体的前轮,也即第一万向轮6的方向移动。当第二连杆18、第三连杆19被拉直时座位板垂直上升过程结束。此时由于第二连杆18、第三连杆19被拉直,第二滑块17开始向左,也即是乘坐者的前方运动,当第二滑块17水平移动时,座位板4以固定铰链2101为中心旋转,实现了座位板4的翻转运动。同时,第二滑块17带动第一连杆15通过第一滑块14在滑道32向上运动实现椅子椅背3的旋转。当第四滑块25运行到丝杠27的极限位置时,座椅达到极限状态,此时完成了由坐姿转换为站姿的过程。乘坐者形成站姿后,即可通过辅助站立行走机构实现站立和走动。
对于辅助站立行走机构10包括起支撑作用的至少三个立柱101。如图3中所示,当立柱101为三个时,三个立柱形成一种稳定的三足支撑,在立柱的下端可以设置第二万向轮11便于移动。在立柱101的上端设置有上下分布的两个弧形骨架102和位于弧形骨架102内部上下分布且对称设置的四个手扶骨架103,在上下两个手扶骨架间对称设置有用于与卡扣9相连接的竖直安放的卡扣杆104。在扶手7上设置有用于控制卡扣9开闭动作的第一按钮801和控制变胞驱动机构工作的第二按钮802。图4和图5所示,卡扣9包括设置于夹板座904两侧且与夹板座通过铰接杆906铰接的夹板901,在夹板901内与铰接杆906平行方向对称固定设置有摆轴902,在摆轴902上设置有带有内螺纹的通孔,设置于两侧夹板901间的位于夹板座904上的第一电机903两侧的输出轴连接有驱动螺杆907与摆轴902带有内螺纹的通孔螺纹连接,夹板座904与扶手7通过卡扣臂905连接。由于通过电气控制卡扣9和变胞驱动机构实际上为通过电气控制卡扣9和变胞驱动机构中的电机工作,此种控制为本领域技术人员所公知的,因此此处不做过多的阐述,在具体实现时只要能够控制电机的正反转以实现技术方案的目的即可。
考虑到通过第二电机30驱动丝杠27转动时,存在丝杠较长造成动作不稳定的情况,因此在轮椅底座31上固定设置有图6所示的导向块28,在导向块28上设置有内螺纹孔,丝杠27与导向块28通过内螺纹孔相连,以此形成稳定的驱动结构。
将轮椅本体和辅助站立行走机构连接时,卡扣9与卡扣杆104形成夹持以实现二者连接。但是在卡扣9和卡扣杆104形成夹持时,由于彼此间的形状配合以及尺寸配合的原因,二者之间所形成的夹持作用会存在不稳定的现象,因此在卡扣9的第一电机903上设置电磁铁909,并将卡扣杆104设置为铁杆,在卡扣9和卡扣杆104形成夹持时,电磁铁909的磁极可与卡扣杆104吸合,以此提高二者连接的稳定性。另外,还可以在第一电机903设置有驱动螺杆907的两侧外壳上设置永磁体908,并将夹板901的材料设置为铁,这样在两个夹板901闭合夹紧时,通过永磁体908的吸合作用使两个夹板901的夹持力度更大,夹持更加稳定可靠。
乘坐者由坐姿转换为站姿后即可借助于辅助站立行走机构进行行走,由于乘坐者为行动不便的偏瘫患者或者老年人,当需要再次坐下时需要重新回到轮椅本体所在位置才能坐回轮椅本体中,因此为了使乘坐者更加便捷地实现此目的,技术方案中在椅背3的下部面向乘坐者的方向设置有用于测量乘坐者与轮椅间距离的距离传感器301,并在扶手7上设置有控制距离传感器301工作的第三按钮803,对于技术方案中所涉及的距离传感器301,可以选择较为常用的红外距离传感器。当乘坐者打算借助辅助站立行走机构走动时,首先按下第三按钮803启动距离传感器301,这时距离传感器301开始检测轮椅本体与乘坐者间的距离,当二者之间的距离超过设定值时,在电气控制下实心轮5带动轮椅本体向着乘坐者运动以缩小二者间的距离,当二者间距离小于设定值时,在电气控制下实心轮5带动轮椅本体远离乘坐者以为乘坐者留出足够的运动空间,由于轮椅本体的前轮,也即图1中的第一万向轮6的存在,可以使轮椅本体在跟随乘坐者的过程中方便地转向以调整跟随方向。由于通过电气控制距离传感器301以及实心轮5的运动属于本领域技术人员所公知的技术,在技术方案具体实现时只要能够实现此功能即可,因此此处不做过多阐述。
- 一种带有辅助站立和行走功能的轮椅
- 一种能够辅助站立和行走的多功能轮椅