一种利用特制标定物的激光雷达与相机联合标定方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明属于激光雷达技术领域,特别涉及了一种激光雷达与相机联合标定方法。
背景技术
目前,激光雷达在智能驾驶领域使用率越来越高,是自动驾驶的行业趋势之一。激光雷达的优点在于,其探测距离较远,而且能够准确获取物体的三维信息;另外它的稳定性相当高,鲁棒性好。但激光雷达成本较高,且对于障碍物的分类只能进行大类的区分,无法细分。基于单一传感器存在的缺陷,将激光雷达与相机进行融合,既发挥了两者各自的优势,又能够互相弥补各自的不足,是自动驾驶领域的重点研究方向之一。
激光雷达与相机融合时需要进行联合标定,但是由于激光雷达角分辨率低,在联合标定时难以精确寻找到标定图案的关键点,从而给标定带来误差。
发明内容
为了解决上述背景技术提到的技术问题,本发明提出了一种利用特制标定物的激光雷达与相机联合标定方法。
为了实现上述技术目的,本发明的技术方案为:
一种利用特制标定物的激光雷达与相机联合标定方法,所述特制标定物包括底板和正四面体,正四面体的棱长已知,将正四面体放置在底板上,将正四面体的3个侧面设为区域1,2,3,将底板设为区域4,且4个区域涂有不同红外反射率的涂料;所述激光雷达与相机联合标定方法的步骤如下:
(1)通过激光雷达拍摄特制标定物的点云图,通过相机拍摄特制标定物的图像;
(2)在点云图中区分出特制标定物上4个区域的点云点,在相机图像中获得正四面体4个顶点的图像像素坐标;
(3)根据特制标定物上4个区域的点云计算出4个区域各自在激光雷达坐标系中的空间平面方程;
(4)利用特制标定物上4个区域的空间平面方程求得正四面体各条棱的空间直线方程,利用各条棱的空间直线方程和棱长求出正四面体4个顶点的空间坐标;
(5)根据步骤(2)得到的正四面体4个顶点的图像像素坐标和步骤(4)得到的正四面体4个顶点的空间坐标,求出激光雷达与相机的外参关系。
进一步地,在步骤(2)中,通过手动方式区分出特制标定物上4个区域的点云点,或者通过程序根据不同区域的反射强度自动区分出特制标定物上4个区域的点云点。
进一步地,在步骤(2)中,通过手动方式在相机图像中获得正四面体4个顶点的图像像素坐标,或者利用视觉检测算法自动相机图像中获得正四面体4个顶点的图像像素坐标。
进一步地,在步骤(5)中,采用PnP问题求解法求出激光雷达与相机的外参关系。
进一步地,采用opencv中的solvepnp函数求出激光雷达与相机的外参关系。
采用上述技术方案带来的有益效果:
本发明利用独特设计的标定物,通过已知的点云数据来求解出与相机中点对应的空间点,简单、快速、准确地进行激光雷达与相机的联合标定,提升了标定精度,解决了激光雷达角分辨率不足的问题,并且操作简单,易于实现。
附图说明
图1是本发明设计的特制标定物示意图;
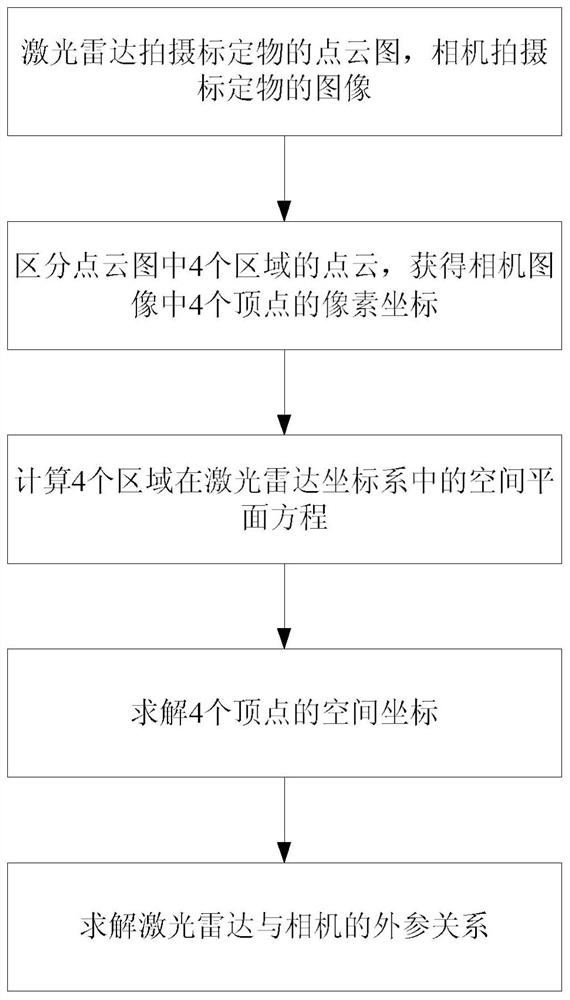
图2是本发明的方法流程图。
具体实施方式
以下将结合附图,对本发明的技术方案进行详细说明。
本发明首先提出了一种特制的标定物,如图1所示,特制标定物包括底板和正四面体,正四面体的棱长已知,将正四面体放置在底板上,将正四面体的3个侧面设为区域1,2,3,将底板设为区域4,且4个区域涂有不同红外反射率的涂料。
本发明基于上述特制标定物,提出了利用特制标定物的激光雷达与相机联合标定方法,如图2所示,步骤如下:
步骤1:通过激光雷达拍摄特制标定物的点云图,通过相机拍摄特制标定物的图像;
步骤2:在点云图中区分出特制标定物上4个区域的点云点,在相机图像中获得正四面体4个顶点的图像像素坐标;
步骤3:根据特制标定物上4个区域的点云计算出4个区域各自在激光雷达坐标系中的空间平面方程;
步骤4:利用特制标定物上4个区域的空间平面方程求得正四面体各条棱的空间直线方程,利用各条棱的空间直线方程和棱长求出正四面体4个顶点的空间坐标;
步骤5:根据步骤2得到的正四面体4个顶点的图像像素坐标和步骤4得到的正四面体4个顶点的空间坐标,求出激光雷达与相机的外参关系。
在本实施例中,优选地,在步骤2中,通过手动方式区分出特制标定物上4个区域的点云点,或者通过程序根据不同区域的反射强度自动区分出特制标定物上4个区域的点云点。
在本实施例中,优选地,在步骤2中,通过手动方式在相机图像中获得正四面体4个顶点的图像像素坐标,或者利用视觉检测算法自动相机图像中获得正四面体4个顶点的图像像素坐标。
在本实施例中,优选地,在步骤5中,采用PnP问题求解法求出激光雷达与相机的外参关系。具体地,可以采用opencv中的solvepnp函数求出激光雷达与相机的外参关系。
实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。
- 一种利用特制标定物的激光雷达与相机联合标定方法
- 一种用于激光雷达与相机联合标定的标定装置及标定方法