一种基于无监督生成对抗网络的非法无人机检测方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及无人机监测技术领域,具体的说是一种基于无监督生成对抗网络的非法无人机检测方法。
背景技术
近年来,无人机因其体积小、成本低、机动灵活等优势已广泛应用于通信、摄影、农业、监控和数字公共服务等领域;另一方面,无人机可以对人、财产和基础设施进行直接物理攻击,也可以通过实时视频或高清图片等窥探隐私信息,对个人及公共安全构成严重威胁
从电磁信号的角度出发,在只有合法无人机相关特征的情况下,对非法无人机的检测问题可以看成是无监督的异常信号识别问题。传统的无监督异常值检测常用算法有:1)一类支持向量机(One Class SVM),适合稳定连续数据的异常检测,一类SVM通过学习这些正常数据的特征去学习一个决策边界/安全边界,通过这个边界去判断新来的数据是否与训练数据类似,超出边界即为异常;2)孤独森林(Isolation Forest)算法,适合稳定连续数据的异常检测,通过iTree形成森林来判断是否异常,某一点如果越容易与其他点区分开,该点的异常指数就越高。目前,也有一些深度学习相关的无监督异常检测算法:1)自动编码器(Auto Encoder),其原理和主成分分析方法(PCA)类似,Auto Encoder是对数据压缩的过程,将高维数据转换至低维度,只是网络层数更深,变换是非线性的,在异常检测时,训练完成的Auto Encoder计算新数据的重建误差,当重建误差大于某个值时,则认为存在异常;2)长短期记忆网络(LSTM),用于对时间序列中的异常进行检测,使用预测结果与实际结果的差值进行异常区间的判断;3)DeepLog,该网络是将LSTM应用于文本日志数据的异常检测,即使用正常运行状态下产生的日志数据作为训练数据,让LSTM模型学习系统正常的日志序列中的模式,从而进行在线的异常检测。
大多数现有的异常检测算法都基于异常数据与正常数据具有较大的差异的前提假设,然而,未来非法无人机智能体可能会模仿正常无人机的通信特征进行跟踪式干扰。因此,需要更有效的算法对非法无人机信号进行检测。随着深度学习的发展,由于生成对抗网络能够无监督地学习复杂分布的数据,已经有一些研究将生成对抗网络GAN用于对图像中的异常进行检测。有些文献通过一个GAN的生成器G来学习正常数据的分布,测试时图像通过学习到的G找到它应该的正常图的样子,再通过对比来找到医学图像中的异常与否情况;有些文献针对AnoGAN在测试阶段仍然需要更新参数的缺陷,此方法提出一种基于BiGAN的方法,训练时,同时学习将输入样本X映射到潜在表示Z的编码器E,以及生成器G和判别器D;有些文献提出一种基于GAN的半监督的异常检测方法。近年来,基于GAN的异常检测方法盛出不穷,但大多应用于医疗、计算机视觉、物体检测等方面。然而,目前将GAN应用于电磁信号异常检测的方法较少。
发明内容
本发明要解决的技术问题是提供一种基于无监督生成对抗网络的非法无人机检测方法,能够在没有非法无人机先验信息的情况下,挖掘合法无人机通信数据中的潜在数据分布和特征,实现对非法无人机的有效检测。
为解决上述技术问题,本发明采用的技术方案为:
一种基于无监督生成对抗网络的非法无人机检测方法,其特征在于:获取无人机电磁信号,通过时频分析功能提取无人机电磁信号中的时频特征,将无人机电磁信号转换成时频图;
利用无监督生成对抗网络学习正常情况下无人机时频图的数据分布情况,最终获取生成器G,所述的生成器G用于输出生成图像,所述的生成图像为输入图像对应的正常无干扰工况下的图像;
通过将待测数据的图像与生成图像对比,进而判定待测的时频图对应的无人机电磁信号是否存在非法干扰信号。
所述的合法无人机使用具有随机载频的BPSK信号形式与地面的基础设施进行有效通信;所述的非法无人机采用的信号干扰方式包括扫频干扰闭和脉冲干扰。
将无人机电磁信号转换成时频图的方式为:通过监测设备对接收到的电磁信号采用时频分析函数伪平滑WV分布提取时频特征,其定义如下式所示:
式中,s(t)为一个非平稳随机信号,s
将提取得到的视频数据转换成图像形成时频图。
对正常数据的无监督学习包括训练阶段和测试阶段,在训练阶段,将正常无人机通信使用的BPSK数据转换成的时频图作为生成对抗网络GAN训练数据,在GAN训练完成后,获得生成器G;在测试阶段,固定网络中的参数不变,将待分析的测试样本
随机变量z的最优值
所述的损失函数可分为残差损失和鉴别器损失;所述的残差损失用于描述生成测试图
式中,
在假设生成器G和潜变量空间完美映射的情况下,当输入为理想的正常数据的情况下,图像
所述的鉴别器损失的定义如下:
式中,
加权后,损失函数定义式如下:
式中,
在测试过程中训练好的GAN的内部参数是固定不动的。
对新数据进行干扰信号识别过程如下:将待测时频图和随机变量最优值
待测时频图与生成图之间的对比过程为:将待测时频图和生成图之间的差异灰度图作为输出,对输出的差异灰度图进行滤波平滑处理和对背景进行处理,最后得到处理后的差异图;
输入测试图和生成图之间的差异如下:
式中,
定义检测函数如下:
式中,m·n为差异图的总像素数目;在对干扰信号的检测时,当Δ大于一个阈值ε时,认为有干扰信号的存在,进行告警;当Δ小于一个阈值ε时,认为没有干扰信号的存在。
通过待测时频图和生成图的差异图捕获到非法无人机信号出现的时间和频段。
该种基于无监督生成对抗网络的非法无人机检测方法能够达到的有益效果为:面对非法无人机信号特征提取等困难的现实挑战,通过时频分析功能提取电磁信号中的时频特征,将无人机电磁信号转换成时频图;利用生成对抗网络对正常情况下无人机通信数据的数据分布情况进行无监督的学习,通过比较测试数据及其对应的生成数据之间的差异实现对非法无人机的检测,同时可捕获到非法无人机信号出现的时间和频段。
附图说明
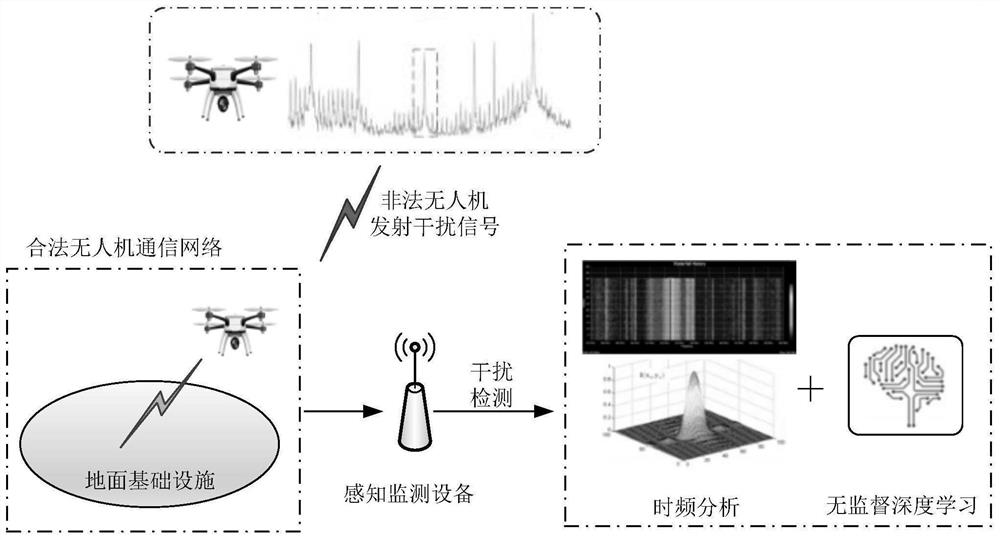
图1是本发明一种基于无监督生成对抗网络的非法无人机检测方法的系统示意图。
图2是本发明一种基于无监督生成对抗网络的非法无人机检测方法中正常无人机信号和及其被干扰后时频图;
图3是本发明一种基于无监督生成对抗网络的非法无人机检测方法中基于GAN的非法无人机检测算法示意图;
图4是本发明一种基于无监督生成对抗网络的非法无人机检测方法中对抗网络生成逼真图像的性能结果图
图5是本发明一种基于无监督生成对抗网络的非法无人机检测方法中对抗网络对干扰信号的检测结果图;
图6是本发明一种基于无监督生成对抗网络的非法无人机检测方法中脉冲干扰和扫频干扰的ROC曲线仿真结果图;
图7是本发明一种基于无监督生成对抗网络的非法无人机检测方法中扫频干扰的ROC曲线仿真结果图;
图8是本发明一种基于无监督生成对抗网络的非法无人机检测方法中脉冲干扰的ROC曲线仿真结果图。
具体实施方式
以下结合说明书附图和具体优选的实施例对本发明作进一步描述。
合法无人机使用一种具有随机载频的BPSK信号形式与地面的基础设施进行有效通信。考虑非法无人机的两种潜在的干扰方式:扫频干扰和脉冲干扰,所述的扫频干扰通过对BPSK信号进行线性扫频干扰,干扰信号的中心频率随合法无人机信号的BPSK信号的变化而变化;所述的脉冲干扰通过在给定频带上随机发起脉冲干扰信号。
将无人机电磁信号转换成时频图的方式为:通过监测设备对接收到的电磁信号采用时频分析函数伪平滑WV分布提取时频特征,其定义如下式所示:
式中,s(t)为一个非平稳随机信号,s
将提取得到的视频数据转换成图像形成时频图。基于平滑伪Wigner-Ville分布和对正常/异常信号的定义,图2为经过时频分析后得到的时频图,横坐标为时间信息,纵坐标为频率信息。其中,左侧为正常的无人机通信的BPSK对应的时频图,右侧分别为非法无人机发射脉冲干扰、扫频干扰后的时频图。
一种基于无监督生成对抗网络的非法无人机检测方法,如图3所示,将无人机电磁信号转换成时频图后;利用无监督生成对抗网络学习正常情况下无人机时频图的数据分布情况,最终获取生成器G,所述的生成器G用于输出生成图像,所述的生成图像为输入图像对应的正常无干扰工况下的图像;通过将待测数据的图像与生成图像对比,进而判定待测的时频图对应的无人机电磁信号是否存在非法干扰信号,通过待测时频图和生成图的差异图能够捕获到非法无人机信号出现的时间和频段。
本实施例中,对正常数据的无监督学习包括训练阶段和测试阶段,在训练阶段,将正常无人机通信使用的BPSK数据转换成的时频图作为GAN训练数据。当一个生成对抗网络训练完成后,生成器G已经学习到了由潜变空间Z到正常的真实图像空间X的映射,即G(Z)=Z→X。但是,生成对抗网络不会自动进行反映射,即μ(X)=X→Z。由于潜变量Z是一个随机变量,所以生成的G(Z)是在正常数据分布下随机采样得到的一个样本数据。潜空间具有平滑的转换特性,因此从潜空间中两个相近的点进行采样,可以得到两个视觉上相似的图像。当输入一个待分析的时频图
随机变量z的最优值
所述的损失函数可分为残差损失和鉴别器损失;所述的残差损失用于描述生成测试图
式中,式中,
在假设生成器G和潜变量空间完美映射的情况下,当输入为理想的正常数据的情况下,图像
所述的鉴别器损失的定义如下:
式中,
加权后,损失函数定义式如下:
式中,
在测试过程中训练好的GAN的内部参数是固定不动的。
本实施例中,对新数据进行干扰信号识别过程如下:将待测时频图和随机变量最优值
待测时频图与生成图之间的对比过程为:将待测时频图和生成图之间的差异灰度图作为输出,对输出的差异灰度图进行滤波平滑处理和对背景进行处理,最后得到处理后的差异图;
输入测试图和生成图之间的差异如下:
式中,
定义检测函数如下:
式中,m·n为差异图的总像素数目;在对干扰信号的检测时,当Δ大于一个阈值ε时,认为有干扰信号的存在,进行告警;当Δ小于一个阈值ε时,认为没有干扰信号的存在。
仿真实验中,使用的生成对抗网络为DCGAN网络,对该网络进行如下训练:
第一,监测设备接收到的信号通过计算机模拟得到,对接收到的信号进行时频分析得到时频图,进而得到训练数据和测试数据;第二,正常无人机通信信号使用BPSK调制信号,在随机频点随机时间下对信号进行20000次采样,通过时频分析获取对应的时频图,形成训练集;第三,将只有正常数据的训练数据集送入深度学习网络进行训练,经过训练迭代,可以得到训练好的模型。所有的实验都是在计算服务器上使用Nvidia GTX 1080GPU进行的。训练完成后,将测试的时频图和随机变量z作为生成器G的输入得到生成图和差异灰度图,进一步分析非法无人机的干扰信号进行检测。
如图4所示,定性地探讨了该生成对抗网络是否能生成逼真的图像。图4中第一行图像为真实的正常数据的时频图,第二行图像为生成对抗网络生成的对应的时频图,这些图像的条件是从潜在表示z中采样,通过映射方法找到。可以看出在给定正常数据的情况下,生成对抗网络能生成相似的正常图像。
如图5所示,定性地探讨了该生成对抗网络是否能检测非法无人机干扰信号。图5中第一列图像为存在干扰信号的时频图,第二列图像为生成的对应的正常情况下的时频图,该图像的条件是从潜在表示Z中采样,通过映射方法找到;第三列图像为第一列图和第二列图的差异灰度图,第四列图为对差异灰度图进行平滑处理和去背景处理后的图,从该图中可以看出,所提出的算法可以有效识别出干扰信号并可看出干扰信号出现的频率和时间。图5中第一行为脉冲干扰信号,第二行为扫频干扰信号。
图6为对脉冲干扰信号和扫频干扰信号检测的ROC曲线,横坐标为假阳率,即虚警概率,纵坐标为真阳率,即为检测概率。在实验中,干扰信号比为6dBm,信噪比为10dBm,平滑滤波器大小为6×6。如图6所示,由于扫频干扰和正常信号相似度高,因此检测性能低于脉冲干扰信号的检测性能。
图7为在不同的滤波器大小下,扫频干扰情况下的ROC曲线。如图所示,平滑滤波器的大小对扫频干扰信号检测的性能影响不大。
图8为在不同的滤波器大小下,脉冲干扰情况下的ROC曲线。如图所示,平滑滤波器的大小对扫频干扰信号检测的性能影响不大。
综上,根据该种基于无监督生成对抗网络的非法无人机检测方法能在没有非法无人机先验信息的情况下,挖掘合法无人机通信数据中的潜在数据分布和特征,实现对非法无人机的有效检测。通过对非法无人机的检测,得到非法无人机的电磁信号时频图,从而捕获到非法无人机信号出现时间和频段。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
- 一种基于无监督生成对抗网络的非法无人机检测方法
- 一种基于无监督生成对抗网络的模糊图像复原方法