作业车辆以及作业车辆的行驶管理系统
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及例如拖拉机等作业车辆以及作业车辆的行驶管理系统。
背景技术
以往,作为在与拖拉机等作业车辆连结的作业装置上安装有无线标签的技术,已知有专利文献1所示的技术。在专利文献1中,具备:作业部,其进行作业;框架,其对作业部进行支承并且能够与车身连结;以及无线标签,其至少具有存储识别信息的存储部和发送识别信息的通信部,并且安装于作业部或框架。
另外,作为在拖拉机的作业车辆上搭载有照相机的技术,已知有专利文献2所示的技术。在专利文献2中,具备:多个照相机,其对车身的周边进行拍摄;作业行驶状况检测传感器组,其检测作业行驶状况;关注区域决定部,其基于来自作业行驶状况检测传感器组的检测信号来决定关注区域;优先显示图像决定部,其将多个照相机中的关注区域进入拍摄视野的照相机的拍摄图像作为优先显示图像;俯瞰图像生成部,其通过对多个照相机的拍摄图像进行视点变换并合成来生成车身周边的俯瞰图像;监视器画面生成部,其生成被划分为显示俯瞰图像的第一显示区域和显示优先显示图像的第二显示区域的监视器显示画面;以及监视器,其显示监视器显示画面。
现有技术文献
专利文献
专利文献1:日本特开2018-61471号公报
专利文献2:日本特开2018-14554号公报
发明要解决的课题
在专利文献1中,能够通过从无线标签发送的信息来掌握安装于拖拉机的后部的作业装置是什么。另外,在专利文献2中,能够提高多个照相机来掌握拖拉机周围的状况。在专利文献1和2中的任一个中,虽然都能够掌握作业装置的种类等,但是实际情况是无法掌握作业装置的详细的状态。
发明内容
因此,本发明鉴于上述问题,其目的在于提供一种能够简单地掌握作业装置的状态的作业车辆以及作业车辆的行驶管理系统。
用于解决课题的方案
用于解决该技术问题的本发明的技术方案的特征如下。
作业车辆具备:行驶车身,所述行驶车身具有连结作业装置的连结部;标记部件,所述标记部件设置于所述作业装置;标记检测装置,所述标记检测装置设置于所述行驶车身并且检测所述标记部件;以及状态运算装置,所述状态运算装置基于所述标记检测装置检测到的检测数据来运算所述作业装置的状态。
所述状态运算装置运算所述作业装置的位置作为所述作业装置的状态。
所述状态运算装置运算所述作业装置的姿势作为所述作业装置的状态。
所述状态运算装置运算所述行驶车身与作业装置的相对位置作为所述作业装置的状态。
所述行驶车身具备对作为该行驶车身的位置的车身位置进行定位的定位装置,所述状态运算装置基于在所述定位位置运算出的车身位置和所述作业装置的状态,运算作为所述作业装置的位置的装置位置。
所述标记检测装置是拍摄所述标记部件的摄像装置。
作业车辆的行驶管理系统具备:标记部件,所述标记部件设置于与行驶车身连结的作业装置;标记检测装置,所述标记检测装置设置于所述行驶车身并且检测所述标记部件;以及状态运算装置,所述状态运算装置基于所述标记检测装置检测到的检测数据来运算所述作业装置的状态。
作业车辆的行驶管理系统具备对作为所述行驶车身的位置的车身位置进行定位的定位装置,所述状态运算装置基于在所述定位位置运算出的车身位置和所述作业装置的状态,运算作为所述作业装置的位置的装置位置。
发明效果
根据本发明,能够简单地掌握作业装置的状态。
附图说明
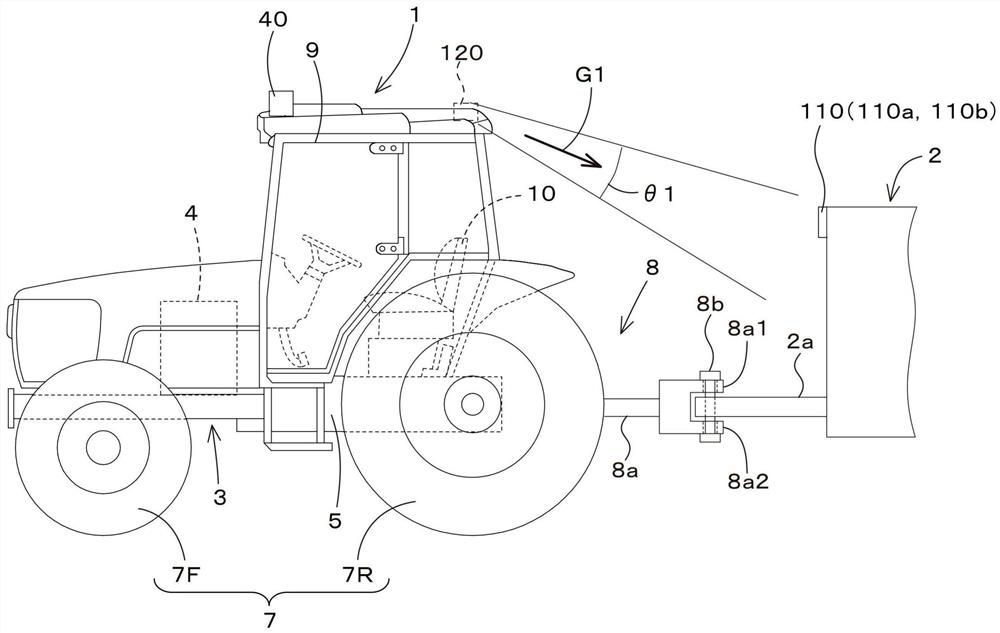
图1是拖拉机的侧面整体图。
图2是表示连结部的图。
图3是表示标记部件的安装状态的图。
图4A是表示标记部件的一例的图。
图4B是表示不同的标记部件的一例的图。
图4C是表示不同的标记部件的一例的图。
图5是表示设定画面的一例的图。
图6是表示标记的位置以及姿势的图。
图7A是表示作业装置相对于行驶车身笔直的状态的图。
图7B是表示作业装置相对于行驶车身倾斜的状态的图。
图8是拖拉机的控制框图。
图9A是表示作业装置相对于地面平行的状态的图。
图9B是表示作业装置相对于地面向右侧倾斜的状态的图。
图9C是表示作业装置相对于地面向左侧倾斜的状态的图。
附图标记说明
1:作业车辆
2:作业装置
3:行驶车身
8:连结部
110:标记部件
120:标记检测装置
150:状态运算装置
ML:姿势
RR:姿势
具体实施方式
以下,基于附图说明本发明的实施方式。
图1表示作业装置2与作业车辆1连结的状态。
首先,对作为作业车辆之一的拖拉机进行说明。
拖拉机1具备:具有行驶装置7的行驶车身3、动力机4以及变速装置5。行驶装置7是具有前轮7F和后轮7R的装置。前轮7F可以是轮式也可以是履带式。另外,后轮7R同样可以是轮式也可以是履带式。动力机4是柴油发动机、电动马达等。变速装置5能够通过变速对行驶装置7的推进力进行切换,并且,能够进行行驶装置7的前进、后退的切换。在行驶车身3设置有驾驶室9,在该驾驶室9内设置有驾驶座位10。
另外,在行驶车身3的后部设置有连结作业装置2的连结部8。连结部是将作业装置2与行驶车身3连结且不进行升降的摆动拉杆、由三点连杆机构等构成而进行升降的升降装置等。在连结部8能够装卸作业装置2。通过将作业装置2与连结部8连结,能够利用行驶车身3牵引作业装置2。作业装置2是进行搬运的拖车、进行耕耘的耕耘装置、散布肥料的肥料散布装置、栽植苗的移植装置、进行灌溉的灌溉装置、散布农药的农药散布装置、散布种子的播种散布装置、进行牧草等的收割的收割装置、进行牧草等的扩散的扩散装置、进行牧草等的收集的牧草收集装置、进行牧草等的成形的成形装置、进行多个作业的复合装置等。在本实施方式中,将作业装置2设为拖车进行说明。
作业装置2具有连结杆2a,该连结杆2a通过螺栓等紧固件固定于作业装置2的框架,在宽度方向上不能摆动。需要说明的是,连结杆2a也可以通过焊接固定于作业装置2的框架。在连结杆2a的前端形成有插入孔2c。
如图2所示,连结部8例如是牵引钩,包括从行驶车身3向后方延伸设置的延伸设置体8a和设置在延伸设置体8a的后端的枢轴支承销8b。延伸设置体8a的前部通过螺栓等紧固件固定于变速装置5的变速箱、差速器壳体等,在宽度方向上不能摆动。延伸设置体8a的后部形成上壁8a1和从上壁8a1离开的下壁8a2,枢轴支承销8b贯通上壁8a1和下壁8a2。通过使作业装置2的连结杆2a位于上壁8a1与下壁8a2之间,并将枢轴支承销8b插入到连结杆2a的插入孔中,从而能够将作业装置2与连结部8连结。
如图3所示,在作业装置2设置有多个标记部件110。图3表示从行驶车身3的后部侧观察在后方连结的作业装置2的状态。多个标记部件110包括第一标记部件110L和第二标记部件110R。第一标记部件110L安装在作业装置2的框架2b的左上部。第二标记部件110R安装在作业装置2的框架2b的右上部。需要说明的是,多个标记部件110的安装位置并未限定。
第一标记部件110L和第二标记部件110R能够识别为彼此不同的标记,在构成标记的框内着色有不同的颜色111a、颜色111b。如图4A所示,第一标记部件110L以及第二标记部件110R是具有4边的矩形(四边形)。构成第一标记部件110L以及第二标记部件110R各自的边界(框)的上边113与下边114平行,右边115与左边116也平行,上边113以及下边114与右边115以及左边116正交。在第一标记部件110L和第二标记部件110R中,具有用于识别为标记的交叉的线117、118。
需要说明的是,图4A的标记部件110是一例。例如,如图4B所示,也可以在第一标记部件110L和第二标记部件110R的框内形成多条线117、118。在图4B的第一标记部件110L和第二标记部件110R中,颜色111a、颜色111b也被着色,能够单独地识别标记。
图4C所示的第一标记部件110L和第二标记部件110R包括上边113和下边114,在框内形成有线117、118,颜色111a、颜色111b被着色。
如图1、图6所示,在拖拉机1的后部设置有检测多个标记部件110的标记检测装置120。标记检测装置120是CCD照相机、CMOS照相机、红外线照相机。标记检测装置120的拍摄方向X1朝向多个标记部件110。另外,在标记检测装置120中,在视角θ1(拍摄范围)内设定有标记检测装置120的位置。标记检测装置120例如设置在驾驶室9的上部。需要说明的是,标记检测装置120只要能够检测标记部件110即可,安装位置并未限定。
如图8所示,拖拉机1具备转向装置11。转向装置11具有方向盘(转向盘)11a、随着方向盘11a的旋转而旋转的旋转轴(转向轴)11b、以及对方向盘11a的转向进行辅助的辅助机构(动力转向装置机构)11c。辅助机构11c包括液压泵21、被供给从液压泵21排出的工作油的控制阀22、以及通过控制阀22进行工作的转向缸23。控制阀22是基于控制信号进行工作的电磁阀。控制阀22例如是能够通过滑阀等的移动进行切换的3位切换阀。另外,控制阀22也能够通过转向轴11b的转向来切换。转向缸23与改变前轮7F的朝向的臂(转向节臂)24连接。
因此,若操作方向盘11a,则根据该方向盘11a而切换控制阀22的切换位置以及开度,根据该控制阀22的切换位置以及开度使转向缸23向左或右伸缩,由此,能够变更前轮7F的转向方向。需要说明的是,上述转向装置11是一例,并不限定于上述结构。
拖拉机1具备定位装置40。定位装置40能够通过D-GPS、GPS、GLONASS、北斗、伽利略、QZSS等卫星定位系统(定位卫星)来检测自身的位置(包含纬度、经度的定位信息)。即,定位装置40接收从定位卫星发送的卫星信号(定位卫星的位置、发送时刻、修正信息等),基于卫星信号来检测拖拉机1的位置(例如,纬度、经度)、即车身位置。定位装置40具有信号接收装置41和惯性测量装置(IMU:Inertial Measurement Unit)42。信号接收装置41是具有天线等并接收从定位卫星发送的卫星信号的装置,与惯性测量装置42分开地安装于行驶车身3。在本实施方式中,信号接收装置41安装于行驶车身3、即驾驶室9。需要说明的是,信号接收装置41的安装部位并不限定于实施方式。
惯性测量装置42具有检测加速度的加速度传感器、检测角速度的陀螺仪传感器等。设置在行驶车身3、例如驾驶座位10的下方,通过惯性测量装置42,能够检测行驶车身3的侧倾角、俯仰角、偏摆角等。
需要说明的是,在上述实施方式中,连结部8是摆动拉杆,但如图8所示,也可以是升降装置。对连结部8是升降装置的情况进行说明。连结部8具有提升臂25a、下连杆25b、顶部连杆25c、提升杆25d、提升缸25e。提升臂25a的前端部能够向上方或下方摆动地支承于收容变速装置5的壳体(变速箱)的后上部。提升臂25a通过提升缸25e的驱动而摆动(升降)。提升缸25e由液压缸构成。提升缸25e经由控制阀37与液压泵连接。控制阀37是电磁阀等,使提升缸25e伸缩。
下连杆25b的前端部能够向上方或下方摆动地支承于变速装置5的后下部。顶部连杆25c的前端部在比下连杆25b靠上方的位置,能够向上方或下方摆动地支承于变速装置5的后部。提升杆25d将提升臂25a与下连杆25b连结。在下连杆25b的后部以及顶部连杆25c的后部连结有作业装置2。当提升缸25e驱动(伸缩)时,提升臂25a升降,并且,经由提升杆25d与提升臂25a连结的下连杆25b升降。由此,作业装置2以下连杆25b的前部为支点向上方或下方摆动(升降)。
如图8所示,拖拉机具备控制装置60。控制装置60进行拖拉机的各种控制。控制装置60基于前进后退部件61a的操作,使行驶车身3前进、后退。控制装置60基于点火开关61b的操作,进行动力机4的起动、停止。控制装置60基于变速切换部件61c的操作来变更变速装置5的变速挡(变速等级)。控制装置60基于加速器61d的操作来变更动力机4的转速(动力机转速)。控制装置60在升降操作部件61e被操作了的情况下,通过对控制阀37对进行控制而使提升缸25e伸缩,经由提升臂25a使作业装置2升降。
需要说明的是,控制装置60也可以进行自动行驶的控制(自动行驶控制)。在控制装置60的自动行驶中,使行驶车身3沿着预先设定的行驶路线自动行驶。控制装置60至少以行驶车身3的车身位置(由定位装置40检测到的位置)与预先设定的行驶路线(行驶路径)一致的方式、即行驶车身3与行驶路线一致的方式设定控制阀22的切换位置以及开度。换言之,在处于自动行驶模式的情况下,控制装置60以拖拉机的行驶位置与行驶路线一致的方式设定转向缸23的移动方向以及移动量(前轮的转向方向以及转向角)。
详细而言,在处于自动行驶模式的情况下,控制装置60将行驶车身3的行驶位置与行驶路线所示的位置(行驶预定位置)进行比较,在行驶位置与行驶预定位置一致的情况下,不变更转向装置11中的方向盘11a的转向角以及转向方向(前轮的转向角以及转向方向)而保持(不变更控制阀22的开度以及切换位置而维持)。控制装置60在行驶位置与行驶预定位置不一致的情况下,以该行驶位置与行驶预定位置之间的偏差(偏移量)为零的方式,变更转向装置11中的方向盘11a的转向角以及/或者转向方向(变更控制阀22的开度以及/或者切换位置)。
需要说明的是,在上述实施方式中,控制装置60在自动行驶控制中,基于行驶位置与行驶预定位置之间的偏差来变更转向装置11的转向角,但在行驶路线的方位与拖拉机(行驶车身3)的行进方向(行驶方向)的方位(车身方位)不同的情况下,控制装置60也能够以车身方位与行驶路线的方位一致的方式设定转向角。另外,控制装置60也可以在自动行驶控制中,根据基于偏差(位置偏差)求出的转向角和基于方位偏差求出的转向角,设定自动行驶控制中的最终的转向角。另外,也可以通过与上述自动行驶控制中的转向角的设定方法不同的方法来设定转向角。另外,控制装置60也可以在自动行驶控制中,以拖拉机(行驶车身3)的实际的车速与对应于预先设定的行驶路线的车速一致的方式控制行驶装置7(即,前轮以及/或者后轮)的转速。另外,控制装置60通过对行驶车身3的转向和车速进行控制来进行自动行驶,但也可以进行由驾驶员调整车速的自动操纵方向控制(自动转向控制),并不限定于自动行驶控制。另外,当然,驾驶员能够进行手动操作拖拉机的手动驾驶。
如图8所示,拖拉机1具备状态运算装置150。状态运算装置150例如由设置于控制装置60的电气/电子电路、程序等构成。需要说明的是,状态运算装置150既可以是存储于设置于拖拉机1的显示装置45的程序,也可以设置于智能手机、平板电脑、PDA的便携式终端151,并未限定。
状态运算装置150基于标记检测装置120检测到的检测数据、例如拍摄图像等,运算作业装置2的状态。例如,状态运算装置150求出作业装置2的位置、即标记部件110(第一标记部件110L、第二标记部件110R)的位置,作为作业装置2的状态。
如图6所示,状态运算装置150在标记检测装置120为照相机(CCD、CMOS等可见光照相机)的情况下,基于照相机拍摄到的拍摄图像,求出第一标记部件110L的位置ML(X
具体而言,状态运算装置150从标记检测装置120取得拍摄图像,根据拍摄图像中映现的形状来识别第一标记部件110L。状态运算装置150在识别第一标记部件110L时,在预先设定的第一标记部件110L的框内(拍摄图像内的框内),求出第一标记部件110L的面积S
另外,状态运算装置150根据从标记检测装置120到第一标记部件110L的焦距(被摄体距离)和第一标记部件110L的姿势ML,求出第一标记部件110L的位置ML(X
另外,状态运算装置150在识别第二标记部件110R时,在预先设定的第二标记部件110R的框内(拍摄图像内的框内),求出第二标记部件110R的面积S
另外,状态运算装置150根据从标记检测装置120到第二标记部件110R的焦距(被摄体距离)和第二标记部件110R的姿势RR,求出第二标记部件110R的位置MR(X
如上所述,状态运算装置150能够求出第一标记部件110L的位置ML(X
如图7A所示,在状态运算装置150求出了作业装置2的左上部的位置ML(X
需要说明的是,状态运算装置150也可以运算行驶车身3与作业装置2的相对位置作为作业装置2的状态。若对显示装置45或便携式终端151进行规定的操作,则状态运算装置150将设定画面M1显示于显示装置45或便携式终端151。设定画面M1显示模仿拖拉机1的图形D1和模仿作业装置2的图形D2。另外,设定画面M1包含X方向的输入部141和Y方向的输入部142。能够向输入部141输入从定位装置40到标记检测装置120的前后方向(X方向的距离)X10。另外,输入部142能够输入从定位装置40到标记检测装置120的宽度方向(Y方向的距离)Y10。例如,在标记检测装置120相对于定位装置40向左侧或右侧偏置的情况下,向输入部142输入偏置量(Y方向的距离)。
这样,在向输入部141、142输入X方向的距离X10以及宽度方向(Y方向的距离)Y10的情况下,定位装置40通过在该定位装置40检测到的车身位置(第一位置)加减与X方向的距离X10以及宽度方向(Y方向的距离)Y10对应的纬度、经度,从而能够求出标记检测装置120的位置(纬度、经度)。状态运算装置150取得作为标记检测装置120的位置的第二位置,另一方面,如上所述,求出作业装置2的前部的位置ML、MR。
在此,状态运算装置150基于从标记检测装置120到第一标记部件110L的焦距(被摄体距离)和第一标记部件110L的位置(作业装置2的前部的位置ML),将第一标记部件110L的位置(作业装置2的前部的位置ML)换算为纬度、经度,从而能够求出将作业装置2的前部的位置ML换算为纬度、经度而得到的第一装置位置(装置位置)。
另外,状态运算装置150基于从标记检测装置120到第二标记部件110R的焦距(被摄体距离)和第二标记部件110R的位置(作业装置2的前部的位置MR),将第二标记部件110R的位置(作业装置2的前部的位置MR)换算为纬度、经度,从而能够求出将作业装置2的前部的位置MR换算为纬度、经度而得到的第二装置位置(装置位置)。
即,能够根据定位装置40定位的第一位置以及标记检测装置120的第二位置,求出地面(田地内)的作业装置2的前部的装置位置(第一装置位置、第二装置位置)。另外,能够根据装置位置(第一装置位置、第二装置位置)和标记检测装置120的第二位置,掌握行驶车身3与作业装置2的相互的相对位置。
接着,以拖车以外的作业装置2为例,也对作业装置2的位置以及姿势进行说明。
图9A~图9C所示的作业装置2是能够与升降装置连结的作业装置,例如,是散布装置的一例。作业装置2具备与升降装置的顶部连杆25c连结的第一连结部31和与下连杆25b连结的连结部32、33。另外,在作业装置2的左部以及右部设置有进行散布的散布喷嘴34,能够进行肥料、药剂等的散布。需要说明的是,散布喷嘴34与省略图示的配管连接,能够通过泵等散布被输送到配管内的散布物(肥料、药剂)。
如图9A所示,在状态运算装置150求出了作业装置2的左上部的位置ML(X
如图9B所示,在状态运算装置150求出了作业装置2的左上部的位置ML(X
如图9C所示,在状态运算装置150求出了作业装置2的左上部的位置ML(X
如上所述,能够通过状态运算装置150求出位置、姿势,能够求出作业装置2的侧倾角、俯仰角、偏摆角、以及作业装置2相对于行驶车身3的位置。状态运算装置150的状态(位置、姿势)也可以显示于显示装置45等。另外,也可以根据状态运算装置150的状态(位置、姿势),由控制装置60控制拖拉机1。
作业车辆1具备:具有连结作业装置2的连结部8的行驶车身3;设置于作业装置2的标记部件110;设置于行驶车身3并且检测标记部件110的标记检测装置120;以及基于标记检测装置120检测到的检测数据来运算作业装置2的状态的状态运算装置150。由此,通过将标记部件110设置于作业装置2,能够简单地掌握作业装置2的位置、姿势等状态。
状态运算装置150运算作业装置2的位置作为作业装置2的状态。由此,能够简单地掌握作业装置2的位置,在田地进行农作业或在果园进行农作业的情况下,即便不在作业装置2设置基于来自定位卫星的信号来检测位置的定位装置,也能够掌握作业装置2位于哪里的位置。另外,不论是在作业装置2设置有定位装置的情况下,还是在定位卫星的信号的接收强度低的情况下,都能够代替定位装置而掌握位置。
状态运算装置150运算作业装置2的姿势作为作业装置2的状态。由此,能够掌握作业装置2的三个方向的姿势(侧倾角、俯仰角、偏摆角)。
状态运算装置150运算行驶车身3与作业装置2的相对位置作为作业装置2的状态。由此,在作业中等,能够掌握作业装置2从行驶车身3离开了多少。换言之,能够掌握作业装置2是接近行驶车身3的状态还是从行驶车身3分离的程度。
在作业车辆1中,行驶车身3具备对作为该行驶车身3的位置的车身位置进行定位的定位装置40,状态运算装置150基于在定位位置运算出的车身位置和作业装置2的状态,运算作为作业装置2的位置的装置位置。由此,能够使用定位装置运算出的车身位置来掌握纬度、经度的纬度、经度。
标记检测装置120是拍摄标记部件110的摄像装置。由此,能够简单地求出作业装置2的状态。
作业车辆1的行驶管理系统具备:设置于与行驶车身3连结的作业装置2的标记部件110;设置于行驶车身3并且检测标记部件110的标记检测装置120;以及基于标记检测装置120检测到的检测数据来运算作业装置2的状态的状态运算装置150。由此,通过将标记部件110设置于作业装置2,能够简单地掌握作业装置2的位置、姿势等状态。
作业车辆1的行驶管理系统具备对作为行驶车身3的位置的车身位置进行定位的定位装置,状态运算装置150基于在定位位置运算出的车身位置和作业装置2的状态,运算作为作业装置2的位置的装置位置。由此,在作业中等,能够掌握作业装置2从行驶车身3离开了多少。换言之,能够掌握作业装置2是接近行驶车身3的状态还是从行驶车身3分离的程度。
本次公开的实施方式应被理解为在所有方面都是例示而不是限制性的。本发明的范围不是由上述说明来表示,而是由权利要求书来表示,意在包括与权利要求书等同的意思以及范围内的所有变更。
- 作业车辆以及作业车辆的行驶管理系统
- 农业用作业车辆的行驶速度控制装置及农业用作业车辆的行驶速度控制方法