一种自动化产线机器人柔性布置结构及工位切换方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及自动化生产设备技术领域,具体涉及一种自动化产线机器人柔性布置结构及工位切换方法。
背景技术
在自动化生产过程中,在产线上需要根据工序需要,在相应的位置布置对应的协作机器人;但是每条产线并不是生产一种产品,根据生产需求,需要对产线进行调整,移动协作机器人的位置。
现有协作机器人的移动主要有三种方式,一种是简易移动底座的实现方式,由人工推动定位,其缺点为:其一,定位精度难以保证,定位速度慢;其二,使用不灵活,不但需要大量的空间而且地面避障能力差;其三,整体位置稳定性差,机器人运行时,极易带动底座一起晃动,产生严重的故障。
第二种是第7轴式移动底座,由伺服电机驱动第7轴完成位置切换,其缺点为:其一,价格较贵;其二 ,空间需求较大,第7轴占用大量的空间;其三,柔性布置的位置很受局限,机械人只能在第7轴方向预留轨道范围内切换。
第三种是AGV式移动底座,由AGV完成位置切换,其缺点为:其一 ,价格昂贵,安装成本高;其二,空间需求大,AGV需要运行轨迹需预留大量空间;其三,整体位置稳定性差,机器人运行时,极易带动底座一起晃动,产生严重的故障。
发明内容
技术目的:针对现有自动化产线机器人移动设备成本高、占用空间大,运行稳定性差等不足,本发明公开了一种占用空间小、移动速度快并且稳定性高的自动化产线机器人柔性布置结构及工位切换方法。
技术方案:为实现上述技术目的,本发明采用了如下技术方案:
一种自动化产线机器人柔性布置结构,包括若干用于固定机器人位置的固定底座,用于连接机器人和固定底座的移动底座,移动底座底部的一端设置用于将移动底座锁紧在固定底座上的夹紧机构;移动底座上设置用于连接机器人的机器人底座,机器人底座、移动底座和固定底座之间通过定位组件配合连接。
优选地,本发明的定位组件包括定位销和定位销套,定位销对称设置在固定底座上,机器人底座上设置与定位销位置对应的定位销套安装止口,定位销套设置在定位销套安装止口上,定位销穿过移动底座和机器人底座后与定位销套连接。
优选地,本发明的夹紧机构的数量为两个,对称设置在移动底座的底部,夹紧机构包括侧支撑板和夹持杆,夹持杆一端与侧支撑板铰接,另一端设置夹持块,夹持块与夹持杆杆身的长度方向垂直,侧支撑板上设有用于锁紧夹持杆的夹钳。
优选地,本发明的夹持杆采用两段式设计,包括平直段和倾斜段,倾斜段一端与侧支撑板铰接,另一端连接平直段,倾斜段的倾斜方向自铰接的一端向下倾斜。
优选地,本发明的夹钳包括把手和U型卡槽,U型卡槽的端部与侧支撑板铰接,侧支撑板和夹持杆均位于U型卡槽的两块侧板之间。
优选地,本发明的机器人底座上同心设置若干与机器人底部相配合的凹止口,其中直径较小的凹止口上缘高度与直径较大凹止口的底部平齐。
优选地,本发明的机器人底座上设置用于定位后快速固定机器人底座的快速锁紧螺栓,固定底座上设置与快速锁紧螺栓对应的锁紧螺栓孔,快速锁紧螺栓依次穿过机器人底座、移动底座后与锁紧螺栓孔配合连接。
一种基于上述自动化产线机器人柔性布置结构的工位切换方法,包括步骤:
S01、首先按照自动化产线的生产需求,将固定底座固定在自动化产线上对应位置;
S02、将移动底座和机器人底座依次放入固定底座上,通过定位组件进行定位和连接;
S03、将机器人放入对应的凹止口内,锁紧夹紧机构,固定移动底座的位置,完成机器人位置的布置;
S04、在自动化产线更换产品时,按照与安装时相反步骤,拆卸机器人,重复步骤S02和S03,进行机器人工位的更换。
优选地,在步骤S01中,固定底座依据自动化产线产品的需求,预先固定,挪动移动底座和机器人的位置,与生产产品的要求相对应。
优选地,在步骤S03中,在需要机器人高速移动时,使用快速锁紧螺栓进行机器人底座的固定。
有益效果:本发明所提供的一种自动化产线机器人柔性布置结构及工位切换方法具有如下有益效果:
1、本发明设置用于定位机器人在自动化产线上位置的固定底座,用于连接机器人和固定底座的移动底座,移动底座上设置用于连接机器人的机器人底座,机器人底座、移动底座和固定底座之间通过定位组件配合连接,装配简单,定位精确,并且无需其他辅助移动设施,占用空间小,在相同空间内,可以容纳更多条产线,提高空间利用率。
2、本发明移动底座的底部设置对称的夹紧机构,在装配完成后,将移动底座锁紧在固定底座上,提高稳定性,在生产过程中,保证机器人的稳定性。
3、本发明的夹紧机构包括侧支撑板和夹持杆,夹持杆一端与侧支撑板铰接,另一端设置夹持块,夹持块与夹持杆杆身的长度方向垂直,通过转动夹持杆进行移动底座的固定,方便快捷,在需要进行工位切换时,将夹持杆转动至竖直方向,不影响搬移操作。
4、本发明所述夹持机构设有用于锁紧夹持杆的夹钳,夹钳包括把手和U型卡槽,U型卡槽的端部与侧支撑板铰接,侧支撑板和夹持杆均位于U型卡槽的两块侧板之间,转动夹钳使卡槽与夹持杆接触,防止夹持杆脱落。
5、本发明夹持杆采用两段式设计,包括平直段和倾斜段,倾斜段一端与侧支撑板铰接,另一端连接平直段,倾斜段的倾斜方向自铰接的一端向下倾斜,夹钳的U型卡槽与夹持杆的倾斜段接触,进行锁紧,防止松脱,增强稳定性。
6、本发明的机器人底座上设置若干与机器人底部的尺寸相匹配的凹止口,简化机器人的安装过程,其中直径较小的凹止口上缘高度与直径较大凹止口的底部平齐,保证在进行尺寸不同的机器人安装时,不会造成影响,适应性好,满足不同型号机器人的安装需求。
7、本发明机器人底座上还设置快速锁紧螺栓,快速锁紧螺栓依次穿过机器人底座、移动底座后与锁紧螺栓孔配合连接,在需要机器人高速运行作业时,进一步固定机器人底座,保持平稳性。
8、本发明通过预先在自动化产线上依照产品要求设置固定底座,可以根据产品的种类增加多个固定底座,进行位置预设,在需要更换生产的产品时,直接拆卸机器人然后挪动移动底座,再装上机器人,完成机器人工位的切换,无需考虑定位精度,切合了生产模式,工位切换迅速,提升工作效率,其现有自动化线体的柔性可得到很大的提高切合了其生产模式。
9、本发明预设固定底座的方式,尤其对于旧产线的升级改造,便于操作,不需占用大量安装空间,手工作业线体,使用本发明,不需要对线体做太大的改动,即可完成升级改造,节约了企业的成本与空间。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单介绍。
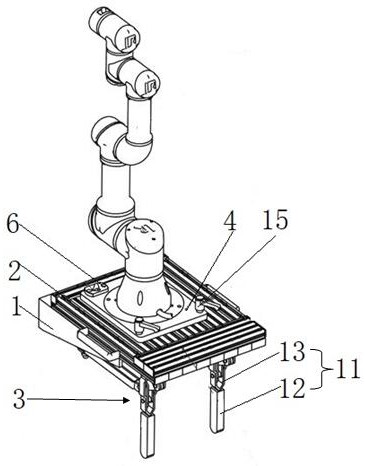
图1为本发明整体结构图;
图2为本发明侧视图;
图3为本发明固定底座结构图;
图4为本发明机器人底座的俯视图;
其中,1-固定底座、2-移动底座、3-夹紧机构、4-机器人底座、5-定位销、6-定位销套、7-定位销套安装止口、8-侧支撑板、9-夹持杆、10-夹持块、11-夹钳、12-把手、13-U型卡槽、14-凹止口、15-快速锁紧螺栓、16-锁紧螺栓孔、901-平直段、902-倾斜段。
具体实施方式
下面通过一较佳实施例的方式并结合附图来更清楚完整地说明本发明,但并不因此将本发明限制在所述的实施例范围之中。
如图1、图2所示为本发明所提供的一种自动化产线机器人柔性布置结构,包括若干用于固定机器人位置的固定底座1,用于连接机器人和固定底座1的移动底座2,移动底座2底部的一端设置用于将移动底座锁紧在固定底座1上的夹紧机构3;移动底座2上设置用于连接机器人的机器人底座4,机器人底座4、移动底座2和固定底座1之间通过定位组件配合连接。
本发明的夹紧机构的数量为两个,对称设置在移动底座2的底部,夹紧机构包括侧支撑板8和夹持杆9,夹持杆9一端与侧支撑板8铰接,另一端设置夹持块10,夹持块10与夹持杆9杆身的长度方向垂直;侧支撑板8上设有用于锁紧夹持杆9的夹钳11。
本发明的夹持杆9采用两段式设计,包括平直段901和倾斜段902,倾斜段902一端与侧支撑板8铰接,另一端连接平直段901,倾斜段902的倾斜方向自铰接的一端向下倾斜。
本发明的夹钳11包括把手12和U型卡槽13,U型卡槽13的端部与侧支撑板8铰接,侧支撑板8和夹持杆9均位于U型卡槽13的两块侧板之间,在进行夹持杆9锁紧时,U型卡槽13与倾斜段902接触,将夹持杆9卡住,防止松脱。
如图1、图3和图4所示,本发明的述定位组件包括定位销5和定位销套6,定位销5对称设置在固定底座1上,机器人底座4上设置与定位销位置对应的定位销套安装止口7,定位销套6设置在定位销套安装止口7上,定位销5穿过移动底座和机器人底座后与定位销套6连接。
本发明的机器人底座4上还同心设置若干与机器人底部相配合的凹止口14,其中直径较小的凹止口上缘高度与直径较大凹止口的底部平齐,能够安装底部尺寸不同的机器人,提高产线的可调整度,适应性好,机器人底部通过螺栓与机器人底座锁紧。
机器人底座4上设置用于定位后快速固定机器人底座的快速锁紧螺栓15,固定底座1上设置与快速锁紧螺栓15对应的锁紧螺栓孔16,快速锁紧螺栓15依次穿过机器人底座4、移动底座2后与锁紧螺栓孔16配合连接,在机器人进行高速动作时,提升稳定性,避免影响生产质量。
本发明可配合MES系统使用,在机器人位置切换完成后,由MES系统自动更新机器人的程序。
一种基于上述自动化产线机器人柔性布置结构的工位切换方法,包括步骤:
S01、首先按照自动化产线的生产需求,将固定底座固定在自动化产线上对应位置;
S02、将移动底座和机器人底座依次放入固定底座上,通过定位组件进行定位和连接;
S03、将机器人放入对应的凹止口内,锁紧夹紧机构,固定移动底座的位置,完成机器人位置的布置;
S04、在自动化产线更换产品时,按照与安装时相反步骤,拆卸机器人,重复步骤S02和S03,进行机器人工位的更换。
在步骤S01中,固定底座依据自动化产线产品的需求,预先固定,挪动移动底座和机器人的位置,与生产产品的要求相对应,在步骤S03中,在需要机器人高速移动时,使用快速锁紧螺栓进行机器人底座的固定。
以螺丝锁附类为例,生产线生产A、B两种产品,A产品在02工位需要做螺钉锁付,B产品需要在03工位做螺钉锁付。
其切换流程如下:停止生产线,拆卸机器人本体和线束、气管等部件,线束采用航空插头集成设计,整体拆卸,用时2分钟;
将移动底座和机器人底座整体搬移至03工位的固定底座上,用时3分钟;
使用夹紧机构进行移动底座的固定,将机器人放入对应的凹止口中,用时1分钟;
进行机器人线束、气管的安装,用时1分钟;
更换机器人操作端的螺丝枪,与需要生产的产品相匹配,用时1分钟;
通过MES系统进行机器人运行程序的切换,用时1分钟;
进行生产测试,检查机器人的安装是否符合要求,用时1分钟,机器人移动个切换流程不超过10分钟,即可进行生产,定位精度依靠固定底座的设置,相较于传统的工位切换方式,省略定位的步骤,节省工序时间,并且提升空间利用率。
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种自动化产线机器人柔性布置结构及工位切换方法
- 光伏产线无人储运自动化工位柔性对接系统