一种摇床用的移动接矿装置
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及摇床接矿技术领域,尤其是涉及一种摇床用的移动接矿装置。
背景技术
公知的,选矿摇床是从床面的出料端外角开始向接料槽内进行下料,然后下料的位置逐渐向内角移动,因此接料槽内的接料盘需要随之进行移动,传统接料盘的移动是由工人来完成的,但是由于现场摇床数量较多,都采用人工调整接料盘的话,会造成人工成本的大幅提高,而且需要工人来判断什么时候移动接矿盘,从而可能会出现失误的情况;综上所述,目前市场上需要一种能够自动控制接料盘移动的装置。
发明内容
为了克服背景技术中的不足,本发明公开了一种摇床用的移动接矿装置。
为实现上述发明目的,本发明采用如下技术方案:
一种摇床用的移动接矿装置,包含安装在接料槽侧面的接料轨道,与接料轨道对应滑动连接的位移支架,以及与位移支架对应连接且位于接料槽内的接料盘;所述位移支架远离接料轨道的侧面设有被测块,且位移支架外设有能够驱动位移支架移动的控制小车;所述控制小车包含小车本体、线性导轨、连锁机构和能够检测被测块位置的对中传感器;所述小车本体的顶部面设有与接料轨道同向的线性导轨,连锁机构的移动端与线性导轨对应滑动连接,连锁机构的连锁端能够与位移支架对应固定连接,所述对中传感器通过安装杆设置在连锁机构的顶部面;
优选的,所述接料轨道由槽钢和两角钢构成,槽钢对应安装于接料槽的侧壁面,且槽钢的槽口与位移支架相对应,槽钢的两侧面分别与一角钢的开口端对应连接;
优选的,所述位移支架对应槽钢槽口的侧面设有能够固定自身位置的自锁机构;
优选的,所述自锁机构包含杠杆锁头、扭力弹簧和安装座,杠杆锁头的锁头端与槽钢的槽底面对应抵触,杠杆锁头的中部与扭力弹簧的一端对应连接,扭力弹簧对应套设在立柱上,立柱通过安装座与位移支架固定连接,且扭力弹簧的另一端与安装座对应固定连接,杠杆锁头的解锁端对应朝向位移支架,且位移支架的表面设有与该解锁端相对应的开口;
优选的,所述杠杆锁头的锁头端端面设有橡胶垫;
优选的,所述连锁机构包含滑动小车和电动推杆,滑动小车的底部面与线性导轨对应滑动连接,滑动小车的顶部面设有安装杆和电动推杆,电动推杆的伸缩端对应朝向位移支架;
优选的,所述电动推杆的伸缩端端头设有水平限位块,且限位块与电动推杆对应垂直;
优选的,所述限位块的端部设有导柱,导柱与限位块对应垂直,且滑动小车的顶部面设有与该导柱相配合的导套;
优选的,所述线性导轨内设有用于驱动滑动小车移动的螺杆电机;
优选的,所述安装杆由两根立柱和置物杆对应连接构成,两立柱安装在连锁机构的顶部面,两立柱的顶端均与置物杆的一端对应连接,置物杆的另一端与对中传感器对应连接。
由于采用如上所述的技术方案,本发明具有如下有益效果:
本发明公开的一种摇床用的移动接矿装置,通过控制小车能够带动连锁机构在多个摇床之间移动,从而依次控制各个摇床中的位移支架和接料盘移动,无需人工操作,省时省力,极大降低了摇床选矿作业中的人工成本;通过控制连锁机构的连锁端伸出,并与位移支架固定连接后,控制小车再移动时即可带动位移支架一同移动,从而实现位移支架的自动移动,同样达到减小工人劳动量的目的,并且自动运行的精度较高,不会出现误判的情况;另外,通过对中传感器与被测块的配合检测,能够让控制小车判断自身是否达到工作位置,是实现位移支架自动移动的前提条件。
附图说明
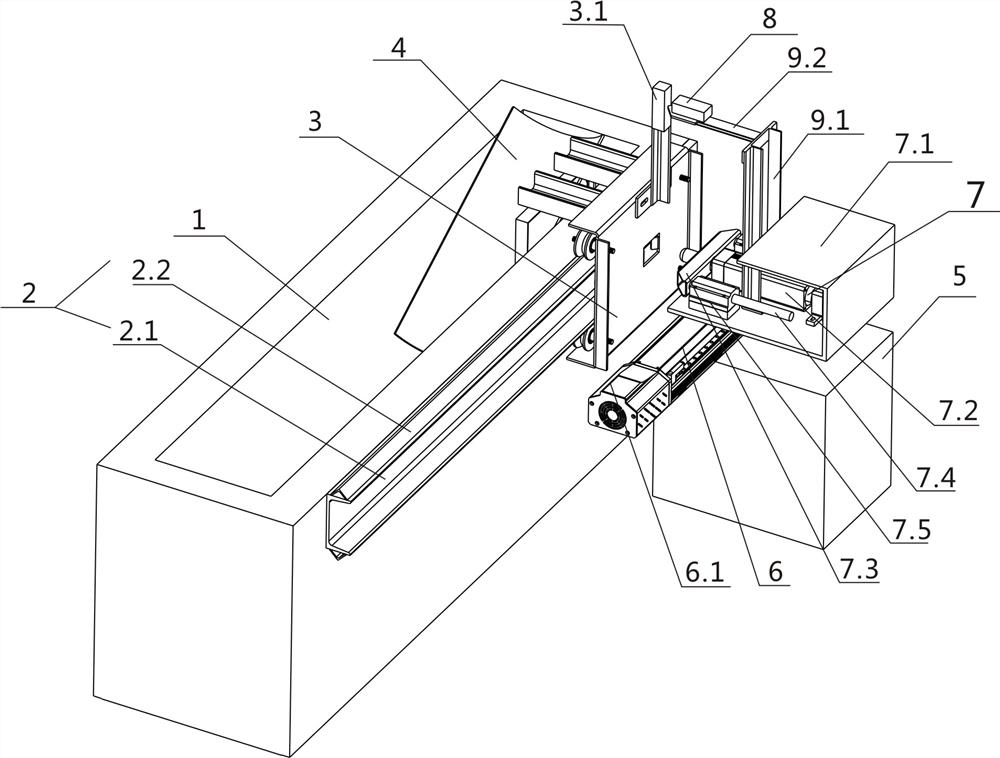
图1为本发明的结构示意图;
图2为本发明的另一结构示意图;
图3为图2的A部放大示意图。
图中:1、接料槽;2、接料轨道;2.1、槽钢;2.2、角钢;3、位移支架;3.1、被测块;4、接料盘;5、小车本体;6、线性导轨;6.1、螺杆电机;7、连锁机构;7.1、滑动小车;7.2、电动推杆;7.3、限位块;7.4、导柱;7.5、导套;8、对中传感器;9、安装杆;9.1、立柱;9.2、置物杆;10、自锁机构;10.1、杠杆锁头;10.2、扭力弹簧;10.3、立柱;10.4、安装座;10.5、橡胶垫。
具体实施方式
通过下面的实施例可以详细的解释本发明,公开本发明的目的旨在保护本发明范围内的一切技术改进。
结合附图1-3所述的一种摇床用的移动接矿装置,包含安装在接料槽1侧面的接料轨道2,根据需要,所述接料轨道2由槽钢2.1和两角钢2.2构成,槽钢2.1对应安装于接料槽1的侧壁面,且槽钢2.1的槽口与位移支架3相对应,槽钢2.1的两侧面分别与一角钢2.2的开口端对应连接,位移支架3上的滑轮轮面,同样设有与角钢2.2对应配合的环槽,从而让接料轨道2和位移支架3之间的连接强度更高,位移支架3的移动更加平稳,与接料轨道2对应滑动连接的位移支架3,以及与位移支架3对应连接且位于接料槽1内的接料盘4;此外,所述位移支架3对应槽钢2.1槽口的侧面设有能够固定自身位置的自锁机构10;
根据需要,所述自锁机构10包含杠杆锁头10.1、扭力弹簧10.2和安装座10.4,杠杆锁头10.1的锁头端与槽钢2.1的槽底面对应抵触,杠杆锁头10.1的中部与扭力弹簧10.2的一端对应连接,扭力弹簧10.2对应套设在立柱10.3上,立柱10.3通过安装座10.4与位移支架3固定连接,且扭力弹簧10.2的另一端与安装座10.4对应固定连接,通过锁头端与接料轨道2之间的摩擦力以及扭力弹簧10.2所施加的弹性作用力,使得本自锁机构10达到让位移支架3位置固定的目的,杠杆锁头10.1的解锁端对应朝向位移支架3,且位移支架3的表面设有与该解锁端相对应的开口,当连锁机构7的连锁端穿过该开口,并抵住杠杆锁头10.1的解锁端移动一定距离后,杠杆锁头10.1的锁头端在扭力弹簧10.2的作用下则会不再抵触接料轨道2,此时自锁机构10得到解锁,控制小车再移动时即可带动唯一支架3一同移动,特别的,所述杠杆锁头10.1的锁头端端面设有橡胶垫10.5,用于增加该锁头端与接料轨道2之间的摩擦力,提高自锁机构10的自锁能力;所述位移支架3远离接料轨道2的侧面设有被测块3.1,且位移支架3外设有能够驱动位移支架3移动的控制小车,当对中传感器8检测到对应摇床上的被测块3.1时,说明到达指定工位,此时停止控制小车,并且对连锁机构7的位置进行微调,让对中传感器8与被测块3.1的位置对准,然后再将连锁机构7的连锁端与位移支架3固定连接,将控制小车与位移支架3相互锁定,让控制小车接下来能够带动位移支架3一同移动;
所述控制小车包含小车本体5、线性导轨6、连锁机构7和能够检测被测块3.1位置的对中传感器8,特别的,对中传感器8能够设为无触点接近开关,当接近开关感应到被测块3.1时,即可向控制小车的控制器内输出停车信号,并且光电式接近开关的感应精度更高,相应更快,从而更有利于连锁机构7的对准;所述小车本体5的顶部面设有与接料轨道2同向的线性导轨6,连锁机构7的移动端与线性导轨6对应滑动连接,根据需要,所述线性导轨6内设有用于驱动滑动小车7.1移动的螺杆电机6.1,通过螺杆电机6.1能够让滑动小车7.1移动距离的精度更高,从而保证连锁机构7与位移支架3对准的精度;所述连锁机构7的连锁端能够与位移支架3对应固定连接,此外,所述连锁机构7包含滑动小车7.1和电动推杆7.2,滑动小车7.1的底部面与线性导轨6对应滑动连接,滑动小车7.1的顶部面设有安装杆9和电动推杆7.2,电动推杆7.2的伸缩端对应朝向位移支架3,通过电动推杆7.2伸入位移支架3的开口内,然后抵住自锁机构10中杠杆锁头6.1的解锁端,让杠杆锁头6.1的锁头端与接料轨道2不再抵触,实现解锁的目的,并且该连锁机构7随着小车本体5一同移动,从而保持自锁机构10位于解锁状态;
另外,所述电动推杆7.2的伸缩端端头设有水平限位块7.3,且限位块7.3与电动推杆7.2对应垂直,该限位块7.3能够限制电动推杆7.2的伸缩端伸出的长度,从而避免出现电动推杆7.2的伸缩端伸出过长,而让杠杆锁头6.1的解锁端抵触到接料轨道2上的情况,特别的,限位块7.3与位移支架3之间相接触面对应平行,根据需要,所述限位块7.3的端部设有导柱7.4,导柱7.4与限位块7.3对应垂直,且滑动小车7.1的顶部面设有与该导柱7.4相配合的导套7.5,从而保证电动推杆7.2伸缩端的动作线路更加精确,不会出现偏移的情况,另外,电动推杆7.2的两侧对称设有限位块7.3、导柱7.4和导套7.5构成的限位机构,进一步提高电动推杆7.2伸缩端的动作线路的精确性;所述对中传感器8通过安装杆9设置在连锁机构7的顶部面,根据需要,所述安装杆9由两根立柱9.1和置物杆9.2对应连接构成,两立柱9.1安装在连锁机构7的顶部面,两立柱9.1的顶端均与置物杆9.2的一端对应连接,置物杆9.2的另一端与对中传感器8对应连接,通过两立柱9.1能够保证置物杆9.2和对中传感器8的支撑强度,置物杆9.2与立柱9.1为垂直状态,让置物杆9.2上安装的对中传感器8能够尽可能的靠近位移支架3,从而提高对中传感器8和被测块3.1的感应精度,减小连锁机构7和位移支架3之间的连锁误差。
实施本发明所述的一种摇床用的移动接矿装置时,首先由摇床向主机发出需要有移动接矿盘4的信号,待控制小车接收到信号后,向对应的摇床处移动,当控制小车上的对中传感器8感应到指定摇床上的被测块3.1时,控制小车自动停车,之后调整连锁机构7在线性导轨6上的位置,使对中传感器8与被测块3.1之间精确对位,接下来将连锁机构7的连锁端伸出,并与位移支架3固定连接,最后控制小车再带动连锁机构7和位移支架3一同移动,实现自动调整接料盘4位置的目的。
本发明未详述部分为现有技术。
- 一种摇床用的移动接矿装置
- 一种实验室摇床接矿装置