矢量共轴手持云台一体无人机及其智能系统
文献发布时间:2023-06-19 11:47:31
技术领域
本发明属于矢量无人机与手持云台等技术领域,具体涉及矢量共轴手持云台一体无人机及其智能系统。
背景技术
传统无人机大致可分为两类,一类是具有机翼的固定翼无人机,另一类是没有机翼的多旋翼无人机,本发明无人机则为以一种多旋翼无人机。传统多旋翼无人机多为四轴,其技术趋于成熟,外形上也形成了固定的标准,难以改变。因为旋翼的固定,只能通过各个螺旋桨之间的桨速差来改变无人机的姿态,实现转向前进等功能,进而导致传统多旋翼无人机的机动性、灵活性较差。
同时,由于多旋翼无人机的旋翼轴数量较多,在设计时需要注意螺旋桨之间的距离,不能使桨叶之间有接触的可能,因此不可避免的增大了多旋翼无人机的尺寸。而根据已有的结论:在桨径尺寸相同的情况下,单桨桨效比多桨桨效更大,多桨桨径为几个小桨直径相加得到最终桨径。而在相同桨效下,与多轴旋翼无人机相比,矢量共轴无人机的体积更加小巧、通过性更好。
再次,传统的多旋翼无人机在每一个螺旋桨下面都需要安装一个动力电机,一架无人机有几轴就需要配置几个电机,十分耗费能源,不够环保。而就拿四轴的无人机与矢量共轴无人机相比,由上面结论可知,在桨效相同的情况下,四个电机要比一个电机能源耗费要高,由此看来矢量共轴无人机更加节能环保。
最后,传统的航拍无人机和手持云台是不同的两款产品。其中,航拍无人机可以飞行到高空获得更广阔的拍摄视角,但不能像手持云台那样方便拿在手里随时随地拍摄。而手持云台能方便拿在手里随时随地拍摄,但却不能像航拍无人机那样飞到空中拍摄更美的风景。
发明内容
本发明的目的是提供矢量共轴手持云台一体无人机,以解决背景技术中提出的问题。同时,本发明还提供基于矢量共轴手持云台一体无人机的智能系统。
本发明采用如下技术方案:
本发明提供的矢量共轴手持云台一体无人机,包括动力单元和机身,所述机身主要包括机身外壳和设于机身外壳内的两舵机、电源及控制模块;还包括云台,动力单元连接于机身顶端,云台连接于机身底端;
动力单元包括由上下两电机构成的同轴电机、分别与上下两电机连接的上螺旋桨对和下螺旋桨对、连接于同轴电机底端的矢量机构;上螺旋桨对和下螺旋桨对分别由上、下电机带动反向旋转;
所述矢量机构由矢量轴固定环、外轴倾斜环、内轴倾斜环从外向内同轴设置;一轴水平贯穿外轴倾斜环和内轴倾斜环且通过两环的圆心,用来连接外轴倾斜环和内轴倾斜环;通过两短轴连接外轴倾斜环和矢量轴固定环;内轴倾斜环通过一内轴心座与同轴电机底端相连,矢量轴固定环底端通过若干连接杆与下方的矢量轴底座连接;
所述两舵机中一舵机的输出轴通过一连杆连接外轴倾斜环外端,另一舵机的输出轴通过另一连杆连接内轴倾斜环外端。
作为优选,矢量轴底座下方预留若干用于安装减震球的减震孔。
作为优选,云台通过一云台连接机构与机身底端连接,所述云台连接机构为云台旋转盘;所述机身包括一底座,所述底座为带内螺纹的结构;该结构与所述云台旋转盘的上轴,通过该上轴将该结构与云台旋转盘可拆卸连接。
作为优选,云台旋转盘下方设置若干安装减震球的减震孔,云台旋转盘通过减震球与云台连接。
本发明提供的智能系统,包括图像类型标记与分类模块、图像分类模块、无人机安全路线规划模块和预警模块;所述图像类型标记与分类模块,用来对输入的图像进行分类标记并获得训练样本集;所述图像分类模块设置于服务器端或云端,用来利用图像类型标记与分类模块的训练结果对无人机拍摄的视频和/或图像进行分类;所述无人机安全路线规划模块,用来基于无人机拍摄的视频和/或图像的分类结果,来进行无人机的路线规划;所述预警模块用来对施工现场的不安全事件进行预警。
进一步的, 无人机安全路线规划模块进一步包括:
二维卫星地图构建模块,用来接收无人机航拍影像和/或无人机激光扫描技术采集的施工区域建筑物高度信息,构建带高度信息的二维卫星地图;
二维障碍物网格卫星地图构建模块,用来将二维卫星地图按需求平均划分为若干二维网格,网格的高度信息设定为其覆盖区域高度的最大值,一个网格当作一个航点,标记二维数字地图中的障碍物,由此得到二维障碍物网格卫星地图;
路径设置模块,用来运用Dijkstra方法得出一系列航点信息,得到起始位置至目的位置的安全飞行路径;航点高度为二维网格的高度信息和用户预设安全值之和。
进一步的,预警模块进一步包括:
异常停靠预警模块,用来当图像分类模块识别到车辆与异常区域重叠,则触发预警;
人员闯入危险区域预警模块,用来当图像分类模块识别到人员图像与危险区域图像发生重叠,则触发预警;
未穿戴安全帽预警模块, 用来当图像分类模块识别出人但未检测到安全帽,或检测到安全帽但未与人头部像素叠加,则触发预警。
本发明无人机打破了传统的多旋翼无人机结构,利用反向双桨同轴电机和矢量结构设计了一款具有矢量推力属性的无人机。同时,该无人机将航拍无人机和手持云台的优点有机结合,能够实现多领域、多环境、多功能的应用。
本发明的优点和有益效果罗列如下:
(1)原材料普通,加工难度低,装配细节部位设计巧妙,既满足了机身的结构强度,又降低了加工成本。
(2)打破了传统的多旋翼无人机的结构设计,利用反向双桨同轴电机和矢量结构设计成了一款具有矢量推力线动力的无人机,具有较高的机动性、灵活性。
(3)在相同桨效下,本发明矢量共轴无人机的体积却要比多旋翼的小,与之相比更加小巧、通过性更好。
(4)与多旋翼无人机相比,本发明矢量共轴无人机更加节能环保,更具有优势。
(5)桨叶可折叠,云台可拆卸,结构简单,整体机身小巧轻便,方便携带。
(6)本无人机将航拍无人机和手持云台有机的结合在一起,能够实现多领域、多环境、多功能的应用。
(7)本无人机可应用于施工现场的管理,可实现自动巡查、危险预警,从而避免安全隐患,尤其适用于开放式的大型建筑工地和建造工地。
附图说明
图1为具体实施方式中该一体无人机的主视图;
图2为具体实施方式中该一体无人机的俯视图;
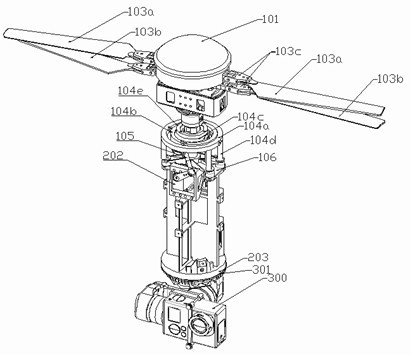
图3为具体实施方式中该一体无人机的立体图。
图中:
101-锥形顶盖,102-同轴电机,103a-上螺旋桨对,103b-下螺旋桨对,103c-活动浆夹,104a-矢量轴固定环,104b-外轴倾斜环,104c-内轴倾斜环,104d-连接杆,104e-内轴心座,105-连杆,106-矢量轴底座;
201-机身外壳,202-舵机,203-底座;
300-云台,301-云台连接机构。
具体实施方式
下面将结合附图和具体实施方式进一步说明本发明。
本发明矢量共轴手持云台一体无人机包括主要由两对反向螺旋桨对、同轴电机、三环同心的矢量机构组成的动力单元,可解决传统旋翼推力线方向不可变的问题,同时提升了桨效。圆柱形的机身外壳,有利于将无人机和手持云台有机结合。
为便于理解其内部结构,图1~3所示均为剖视图。见图1~3,本发明一体无人机包括动力单元、机身和云台300。动力单元设于机身顶部,云台300连接于机身底端。云台300通过一云台连接机构301与机身底端连接,本具体实施方式中,云台连接机构301为云台旋转盘。
动力单元主要包括同轴电机102、两对反向螺旋桨对、矢量机构,同轴电机102固定于锥形顶盖101下,同轴电机102由上下两个同轴的电机构成。两对反向螺旋桨对包括上螺旋桨对103a和下螺旋桨对103b,上螺旋桨对103a和下螺旋桨对103b分别与同轴电机102的上、下电机连接,由上、下电机带动绕相反方向旋转。本具体实施方式中,各螺旋桨各由一活动浆夹103c与相应的电机连接(本发明中活动浆夹103c数量为4,但附图中仅标记部分活动桨夹103c),活动浆夹103c分别与同轴电机102中上、下电机的齿轮轴连接,上、下电机带动齿轮主动,从而带动与活动浆夹103c连接的螺旋桨旋转。本具体实施方式中,螺旋桨可折叠,当同轴电机102停止转动,可将螺旋桨折叠;当同轴电机102运行,螺旋桨在离心力作用下展开。因为上螺旋桨对103a和下螺旋桨对103b互逆旋转,可抵消螺旋桨叶产生的反扭力,确保机身不自旋。
矢量机构采用三环同心的简洁结构,矢量机构设于同轴电机102底端,其用来控制无人机的偏转范围。矢量机构由矢量轴固定环104a、外轴倾斜环104b、内轴倾斜环104c从外向内同轴设置。外轴倾斜环104b和内轴倾斜环104c通过一水平贯穿两环圆心的轴连接,该轴记为内外环连接轴。通过两短轴连接外轴倾斜环104b和矢量轴固定环104a。矢量轴固定环104a底端通过四根塑料的连接杆104d与下方的矢量轴底座106连接。矢量轴底座106中部设置有用来安装舵机202的舵机板(未在图中画出),为获得减震功能,在矢量轴底座106下方预留若干用于安装减震球的减震孔。矢量机构通过一位于内轴倾斜环104c上方的内轴心座104e与同轴电机102底座相连,具体可通过螺丝或铆钉等连接件进行连接,连接件可选择材质为不易损坏的硬质PAL塑料。
一连杆105的一端连接外轴倾斜环104b外端,具体来说可与内外环连接轴的外端连接,连杆105另一端通过柳钉与下方舵机202的输出轴连接。即舵机202的输出轴通过连杆105连接外轴倾斜环104b外端。本发明包括两舵机,所以配套两连杆,附图中仅画出一舵机和一连杆,另一舵机和连杆的连接原理相同,只是连杆的连接位置略有区别。另一连杆的一端内轴倾斜环104c外端,具体来说可与位于内轴倾斜环104c外端的内外环连接轴连接,连杆另一端通过柳钉与下方的另一舵机的输出轴连接。
本发明无人机机身与其他无人机机身结构无异,主要包括机身外壳201及设于机身外壳201内的舵机202、电源及控制模块,控制模块用来接收外部指令并控制舵机202。矢量机构通过矢量轴底座106所设减震球与机身外壳201顶端相连,可减少机身抖动,更利于无人机的控制。机身外壳201内预留电源槽和其他大量空间,可安装舵机202、电源和其他控制单元。机身外壳201的底座203为带内部螺纹的可拆卸结构,该可拆卸结构与云台旋转盘匹配,通过内螺纹与云台旋转盘上轴连接,从而实现云台主体与机身的可拆卸连接。作为优选,在云台旋转盘下方也设置若干安装减震球的减震孔,云台旋转盘通过减震球与云台300连接,使得云台300更为实用。
本发明无人机主要材料可采用PLA塑料,PLA塑料是一种兼容3D打印机的塑料,可在200°C融化。可利用3D打印工艺制作本发明无人机的骨架,所得无人机整体结构牢固安全,质量轻巧,环保节能。
本发明无人机所对应的智能系统包括图像类型标记与分类模块、图像分类模块、无人机安全路线规划模块和预警模块。
下面将分别对智能系统各模块的实现方法进行详细描述。
(1)图像类型标记与分类模块
图像类型标记与分类模块,用来对输入的图像进行分类标记获得训练样本集。首先,采集大量图像,通过人工标记方式对图像进行分类标记,获得训练所需的样本集。为加快图像标记速度,减少人工标记工作量,可利用yolov3引擎辅助标记,再通过人工标记修正误差。
(2)图像分类模块
图像分类模块设置于服务器端或云端,用来利用图像类型标记与分类模块的训练结果对无人机拍摄的视频或图像进行分类。首先,进行图像的训练学习。利用图像类型标记与分类模块获得样本集,将样本集输入神经网格进行训练,训练结果可用于图像的分类预测。将无人机拍摄的图像回传至服务器端或云端,即可实现图像分类。
本发明利用darkner53网络结构进行训练,基本全用卷积层进行降维并提取特征,并生成9个anchor box分别进行大中小物体的识别。训练过程不断进行正向传播和反向传播,来调节节点值,最终获得训练权重,即训练结果。
(3)无人机安全路线规划模块
无人机安全路线规划模块用来基于无人机拍摄的建筑物视频和/或图像,进行路线规划。
该模块的路径规划过程如下:首先,接收无人机航拍影像和/或无人机激光扫描技术采集的施工区域建筑物高度信息,构建带高度信息的二维卫星地图;然后,将地图按需求平均划分为若干二维网格,网格的高度信息设定为其覆盖区域高度的最大值,一个网格当作一个航点,标记二维数字地图中的障碍物,由此得到二维障碍物网格卫星地图;接着,运用Dijkstra方法得出一系列航点信息,得到起始位置至目的位置的安全飞行路径;航点高度为二维网格的高度信息和用户预设安全值之和。
(4)预警模块,当无人机应用于现场施工时,所述预警模块用来对施工现场的不安全事件进行预警。
不安全事件依据需求自定义,本具体实施方式中,自定义的不安全事件包括:施工停靠异常、人员闯入危险区域、未穿戴安全帽。利用图像分类模块可识别不安全事件相关的图像元素,从而触发危险预警。例如,当图像分类模块识别到车辆与异常区域重叠,则触发预警;当图像分类模块识别到人员图像与危险区域图像发生重叠,则触发预警;当识别出人,但未检测到安全帽,或检测到安全帽但未与人头部像素叠加,则触发预警。
本领域的普通技术人员将会意识到,这里所述的具体实施方式实施例是为了帮助理解本发明,应被理解为本发明保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍落在本发明的保护范围内。
- 矢量共轴手持云台一体无人机及其智能系统
- 矢量共轴手持云台一体无人机