拖布移除提醒方法、装置及清洁机器人系统
文献发布时间:2023-06-19 11:50:46
技术领域
本申请涉及自动清洁技术领域,特别是涉及一种拖布移除提醒方法、装置及清洁机器人系统。
背景技术
扫地机器人又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。随着科学技术的飞速发展和人民生活水平的不断提高,扫地机器人在人们日常生活中使用越来越广泛,逐渐成为家居生活必不可少的一种家用电器。
大多数扫地机器人集吸尘、拖地于一体,不仅可以完成简单的清扫操作,还能对地面进行深度清洁。然而,受用户地板材质的限制,扫地机器人用来进行拖地的拖布不能长时间与地板接触。例如,当地板材质为木质时,若扫地机器人完成拖地之后不及时将拖布移除,则很容易使木质地板受潮腐坏,严重影响地板的使用寿命。故传统的扫地机器工作可靠性较差。
发明内容
基于此,有必要针对传统的机器人工作可靠性差的问题,提供一种拖布移除提醒方法、装置及清洁机器人系统。
一种拖布移除提醒方法,包括:获取清洁器人工作环境的地板材质信息;当所述地板材质信息为易受潮腐坏材质时,在清洁机器人上桩进行充电的过程中,根据设置于充电桩的第一霍尔检测器发送的霍尔检测信号分析充电桩是否安装有防水垫;当充电桩未安装有防水垫时,推送移除拖布的提醒信息。
在一个实施例中,所述获取清洁器人工作环境的地板材质信息的步骤,包括:控制清洁机器人的超声波检测器开启向地面发射超声波;接收所述超声波检测器根据地面反射的超声波生成的超声检测信号进行分析,得到地板材质信息。
在一个实施例中,所述获取清洁器人工作环境的地板材质信息的步骤,包括:控制清洁机器人的悬崖检测器开启向地面发射红外光线;接收所述悬崖检测器根据地面反射的红外光线生成的红外检测信号进行分析,得到地板材质信息。
在一个实施例中,所述当所述地板材质信息为易受潮腐坏材质时,在清洁机器人上桩进行充电的过程中,根据设置于充电桩的第一霍尔检测器发送的霍尔检测信号分析充电桩是否安装有防水垫的步骤,包括:
当所述地板材质信息为易受潮腐坏材质时,检测清洁机器人是否开启拖地工作模式;当清洁机器人开启拖地工作模式时,在清洁机器人上桩进行充电的过程中,根据设置于充电桩的第一霍尔检测器发送的霍尔检测信号分析充电桩是否安装有防水垫。
在一个实施例中,所述当所述地板材质信息为易受潮腐坏材质时,检测清洁机器人是否开启拖地工作模式的步骤之后,还包括:当清洁机器人未开启拖地工作模式时,控制清洁机器人上桩充电。
在一个实施例中,所述检测清洁机器人是否开启拖地工作模式的步骤,包括:检测清洁机器人是否安装拖布支架。
在一个实施例中,所述检测清洁机器人是否安装拖布支架的步骤,包括:控制清洁机器人的第二霍尔检测器开启运行;根据所述第二霍尔检测器输出的霍尔检测信号分析清洁机器人是否安装拖布支架。
在一个实施例中,所述当所述地板材质信息为易受潮腐坏材质时,在清洁机器人上桩进行充电的过程中,根据设置于充电桩的第一霍尔检测器发送的霍尔检测信号分析充电桩是否安装有防水垫的步骤之后,还包括:当充电桩安装防水垫时,控制机器人上桩进行充电。
一种拖布移除提醒装置,包括:地板材质信息获取模块,用于获取清洁器人工作环境的地板材质信息;防水垫安装分析模块,用于当所述地板材质信息为易受潮腐坏材质时,在清洁机器人上桩进行充电的过程中,根据设置于充电桩的第一霍尔检测器发送的霍尔检测信号分析充电桩是否安装有防水垫;提醒信息推送模块,用于当充电桩未安装有防水垫时,推送移除拖布的提醒信息。
一种清洁机器人系统,包括清洁机器人、充电桩以及设置于清洁机器人的控制器和设置于充电桩的第一霍尔检测器,所述控制器连接所述第一霍尔检测器,所述控制器用于根据上述方法进行拖布移除提醒。
在一个实施例中,所述清洁机器人系统还包括设置于清洁机器人的第二霍尔检测器,所述第二霍尔检测器连接所述控制器。
在一个实施例中,所述清洁机器人系统还包括设置于清洁机器人的超声波检测器,所述超声波检测器连接所述控制器。
在一个实施例中,所述清洁机器人系统还包括信息提示装置,所述信息提示装置连接所述控制器。
上述拖布移除提醒方法、装置及清洁机器人系统,首先能够获取清洁机器人所处工作环境的地板材质信息进行分析;之后在地板材质信息为易受潮腐坏材质时,还能进一步结合清洁机器人上桩进行充电的充电桩是否安装有防水垫的分析判断;最终在充电桩未安装有防水垫的情况下,能够输出移除拖布的提示信息告知用户。通过上述方案,可结合实际情况,在清洁机器人上桩充电的充电桩没有安装防水垫的情况下,及时进行拖布移除提醒,从而避免充电过程中拖布长时间浸泡易受潮腐坏材质的地板,保证地板的使用寿命,有效提高清洁机器人的工作可靠性。
附图说明
为了更清楚地说明本申请实施例或传统技术中的技术方案,下面将对实施例或传统技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为一实施例中拖布移除提醒方法流程示意图;
图2为另一实施例中拖布移除提醒方法流程示意图;
图3为又一实施例中拖布移除提醒方法流程示意图;
图4为再一实施例中拖布移除提醒方法流程示意图;
图5为又一实施例中拖布移除提醒方法流程示意图;
图6为一实施例中拖布移除提醒装置结构示意图;
图7为一实施例中清洁机器人系统结构示意图;
图8为另一实施例中清洁机器人系统结构示意图;
图9为又一实施例中清洁机器人系统结构示意图。
具体实施方式
为了便于理解本申请,下面将参照相关附图对本申请进行更全面的描述。附图中给出了本申请的较佳的实施例。但是,本申请可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本申请的公开内容的理解更加透彻全面。
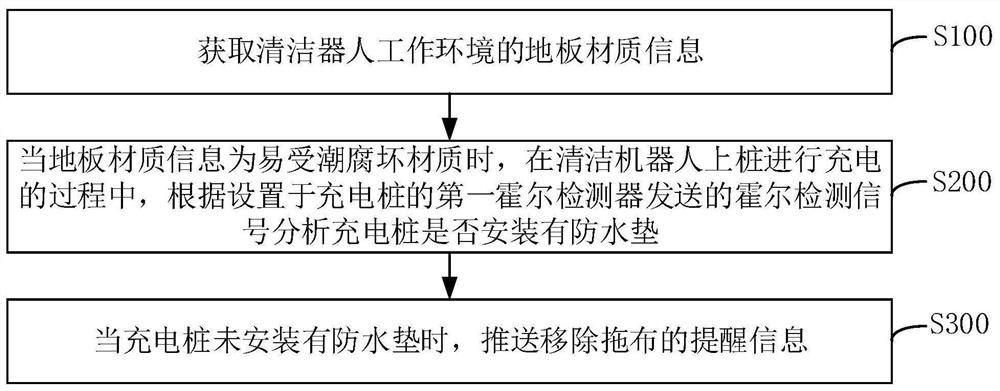
请参阅图1,一种拖布移除提醒方法,包括步骤S100、步骤S200和步骤S300。
步骤S100,获取清洁器人工作环境的地板材质信息。
具体地,清洁机器人工作环境即为清洁机器人进行清扫、拖地对应的区域。由于室内环境装修风格多样,对于不同的用户,地板装修材质选取也不完全相同,其中一些地板材质容易受潮腐坏(例如木质地板或者易生锈金属地板等),不宜长时间保持潮湿,或者说不宜长时间与水接触,否则使用寿命将会受到影响。而清洁机器人在对地面进行清扫时,若开启拖地工作模式,此时清洁机器人的拖布将不可避免的与地板接触。在清洁机器人停止工作时,清洁机器人将不会运动,而是停止在某一位置,若不及时将清洁机器人的拖布移除,将会导致拖布长时间浸泡地板的同一位置,很容易影响地板的使用寿命。故本实施例的方案,可结合地板材质信息进行分析,最终实现清洁机器人的拖布移除提醒。
应当指出的是,获取清洁机器人地板材质信息的操作,可以是在清洁机器人在工作(也即对地面进行清扫和/或拖地)过程中,清洁机器人上相应的器件进行检测分析得到,或者是清洁机器人停止工作后,通过设置于清洁机器人的相应器件进行分析得到。在其它实施例中,还可以是通过用户输入,具体采用何种方式来获取清洁机器人工作环境的地板材质信息,具体可结合用户需求进行不同选择。
步骤S200,当地板材质信息为易受潮腐坏材质时,在清洁机器人上桩进行充电的过程中,根据设置于充电桩的第一霍尔检测器发送的霍尔检测信号分析充电桩是否安装有防水垫。
具体地,易受潮腐坏材质即为长时间与水接触会发生变质,使用寿命会受到严重影响的材质。防水垫即为用来防止地板与水分(可以是清洁机器人的拖布上遗留的水分)接触的垫子。控制器在接收到地板材质信息之后,需要进一步分析此时的地板材质信息是否属于易受潮腐坏材质,若属于易受潮腐坏材质,则执行后续的防水垫设置检测操作;若当前材质信息不属于易受潮腐坏材质时,也就没有继续检测是否设置防水垫的必要。
可以理解,控制器进行地板材质信息是否属于易受潮腐坏材质分析的方式并不是唯一的。在一个实施例中,控制器预存有多种地板材质信息与相应地板材质信息是否属于易受潮腐坏材质的数据,当控制器获取地板材质信息之后,直接与预存的数据进行匹配分析,即可以得到当前地板材质信息是否属于易受潮腐坏材质的结论。
充电桩设置有第一霍尔检测器,且第一霍尔检测器与设置于清洁机器人的控制器通信连接。霍尔检测器即霍尔传感器,通过霍尔检测器可检测磁场的变化,进而通过磁场的变化来反映充电桩是否安装防水垫。本实施例中,防水垫设置有磁铁,并且将霍尔检测器设置于充电桩的防水垫安装位置处,在安装防水垫之后,霍尔检测器会检测到周围磁场发生变化,霍尔检测器将该磁场变化转换为霍尔检测信号并输出至控制器进行分析。当控制器接收到霍尔检测信号达到预设阈值时,即表示充电桩安装有防水垫。
步骤S300,当充电桩未安装有防水垫时,推送移除拖布的提醒信息。
具体地,当控制器根据接收到的霍尔检测信息进行分析,得到清洁机器人上桩进行充电的充电桩上并未安装防水垫之后,控制器将会向用户推送移除拖布的提醒信息。因为在清洁机器人所处工作环境中地板为易受潮腐坏材质,且充电桩也并未安装防水垫时,在充电过程中将会使得清洁机器人的拖布与地板长时间接触,此时为了避免长时间浸泡影响地板的使用寿命,此时控制器将会推送移除拖布的提醒信息。
应当指出的是,控制器推送移除拖布的提醒信息的方式并不是唯一的。在一个实施例中,清洁机器人或者充电桩还设置有信息提示装置,控制器与信息提示装置相连接,控制器可通过信息提示装置向用户推送移除拖布的提醒信息。根据信息提示装置的类型不同,对应的推送形式也会有所区别,具体可以以声、光等形式推送告知用户。在另一个实施例中,还可以是控制器与用户终端通信连接,可直接将移除拖布的提醒信息推送至用户终端,以告知用户。
请参阅图2,在一个实施例中,步骤S100包括步骤S110和步骤S120。
步骤S110,控制清洁机器人的超声波检测器开启向地面发射超声波;步骤S120,接收超声波检测器根据地面反射的超声波生成的超声检测信号进行分析,得到地板材质信息。
具体地,本实施例中采用超声波检测的方式进行地板材质信息的检测操作。在清洁机器人处于清洁工作过程中,设置于清洁机器人的超声波检测器可向地面发射超声波,根据地面材质的不同,被地面反射回超声波也会有所区别。超声波检测器接收地面反射的超声波之后,经过压电转换,得到对应的超声波检测信号,并发送至控制器。控制器内预存有超声波检测信号与地板材质信息对应关系的超声波信号数据库,控制器接收超声波检测信号之后,与预设的超声波信号数据库进行比对分析,即可以得到当前工作环境的地板材质信息。
请参阅图3,在一个实施例中,步骤S100包括步骤S130和步骤S140。
步骤S130,控制清洁机器人的悬崖检测器开启向地面发射红外光线;步骤S140,接收悬崖检测器根据地面反射的红外光线生成的红外检测信号进行分析,得到地板材质信息。
具体地,悬崖检测器即为清洁机器人工作过程中进行清洁机器人距离地面距离信息检测的器件。悬崖检测器利用红外检测原理,实现距离测量。而红外光线在照射到物体时,根据不同物体的材质,被其反射的红外光线的强弱也不同,利用这一原理,还可进一步利用悬崖检测器来实现地板材质信息的检测操作。同样的,清洁机器人开启进行工作的过程中,设置于清洁机器人的悬崖检测器可向地面发射红外光线,根据地面材质的不同,被地面反射回红外光线也会有所区别。悬崖检测器接收地面反射的红外光线之后,进行光电转换得到对应的红外检测信号,并发送至控制器。控制器内预存有红外检测信号与地板材质信息对应关系的红外信号数据库,控制器接收红外检测信号之后,与预设的红外信号数据库进行比对分析,即可以得到当前工作环境的地板材质信息。本实施例不需要增加额外的器件,利用清洁机器人原有的悬崖检测器即可实现地板材质信息检测,具有节约资源、有利于清洁机器人小体积布局的优点。
请参阅图4,在一个实施例中,步骤S200包括步骤S210和步骤S220。
步骤S210,当地板材质信息为易受潮腐坏材质时,检测清洁机器人是否开启拖地工作模式;步骤S220,当清洁机器人开启拖地工作模式时,在清洁机器人上桩进行充电的过程中,根据设置于充电桩的第一霍尔检测器发送的霍尔检测信号分析充电桩是否安装有防水垫。
具体地,本实施例中,在控制器分析得到清洁机器人工作区域的地板材质为易受潮腐坏材质时,控制器并非直接接收霍尔检测信号进行充电桩是否安装防水垫的检测,而是首先进行清洁机器人是否开启拖地工作模式的检测,只有在清洁机器人开启了拖地工作模式,才会进一步进行是否安装防水垫的检测操作。
可以理解,控制器进行检测清洁机器人是否开启拖地工作模式的方式并不是唯一的,在一个实施例中,可以是通过检测控制器自身是否有拖地相关的执行命令接收或发送。在另一个实施例中,由于拖地工作模式需要安装对应的拖布支架,故还可以是通过外部检测器检测是否安装拖布支架来实现。
通过本实施例的方案,在清洁机器人进行防水垫的检测操作之前,还会先进行清洁机器人是否启用拖地工作模式的检测,只有在启用拖地工作模式的情况下,才会有拖布与地板长时间接触的可能,此时才会进一步执行是否安装防水垫检测的操作,否则也就没有进行是否安装防水垫检测的必要。通过本实施例的方案,可进一步提高拖布移除提醒方法的操作可靠性。
因此,请结合参阅图4,在一个实施例中,步骤S210之后,该方法还包括步骤S230。
步骤S230,当清洁机器人未开启拖地工作模式时,控制清洁机器人上桩充电。
具体地,在该实施例中,清洁机器人并未开启拖地工作模式,此时也就没有充电过程中拖布与地板接触的可能。故此时直接控制清洁机器人上桩进行充电即可。
在一个实施例中,检测清洁机器人是否开启拖地工作模式的步骤,包括:检测清洁机器人是否安装拖布支架。
具体地,在清洁机器人开启拖地模式进行拖地时,由于该过程需要清洁机器人的拖布操作工作,故本实施例中,通过检测机器人是否安装拖布支架,实现清洁机器人是否开启拖地工作模式的检测,清洁机器人安装了拖布支架,即表明清洁机器人开启了拖地工作模式。
在一个实施例中,检测清洁机器人是否安装拖布支架的步骤,包括:控制清洁机器人的第二霍尔检测器开启运行;根据第二霍尔检测器输出的霍尔检测信号分析清洁机器人是否安装拖布支架。
具体地,检测清洁机器人是否安装拖布支架的方式并不是唯一的,本实施例利用霍尔检测器来实现。拖布支架设置有磁铁,并且将第二霍尔检测器设置于清洁机器人的拖布安装位置处,在安装拖布支架之后,第二霍尔检测器会检测到周围磁场发生变化,第二霍尔检测器将该磁场变化转换为霍尔检测信号并输出至控制器进行分析。当控制器接收到霍尔检测信号达到预设阈值时,即表示清洁机器人安装有拖布支架。
请参阅图5,在一个实施例中,步骤S200之后,该方法还包括步骤S400。
步骤S400,当充电桩安装防水垫时,控制机器人上桩进行充电。
具体地,在清洁机器人回充上桩进行充电的过程中,检测充电桩是否安装有防水垫的操作之后,若检测到充电桩已经安装了防水垫,即此时用户已经在充电桩处做了防水措施,也就没有提醒进行移除拖布的必要。故在该种情况下,只需要控制清洁机器人执行上桩进行充电的操作即可。
通过本实施例的方案,既可以实现移除拖布的提醒信息的合理推送,还能避免已经安装防水垫的情况下,清洁机器人仍然推送除拖布的提醒信息的情况发生,能够有效提高用户使用体验。
上述拖布移除提醒方法,首先能够获取清洁机器人所处工作环境的地板材质信息进行分析;之后在地板材质信息为易受潮腐坏材质时,还能进一步结合清洁机器人上桩进行充电的充电桩是否安装有防水垫的分析判断;最终在充电桩未安装有防水垫的情况下,能够输出移除拖布的提示信息告知用户。通过上述方案,可结合实际情况,在清洁机器人上桩充电的充电桩没有安装防水垫的情况下,及时进行拖布移除提醒,从而避免充电过程中拖布长时间浸泡易受潮腐坏材质的地板,保证地板的使用寿命,有效提高清洁机器人的工作可靠性。
请参阅图6,一种拖布移除提醒装置,包括:地板材质信息获取模块100、防水垫安装分析模块200和提醒信息推送模块300。
地板材质信息获取模块100用于获取清洁器人工作环境的地板材质信息;防水垫安装分析模块200用于当地板材质信息为易受潮腐坏材质时,在清洁机器人上桩进行充电的过程中,根据设置于充电桩的第一霍尔检测器发送的霍尔检测信号分析充电桩是否安装有防水垫;提醒信息推送模块300用于当充电桩未安装有防水垫时,推送移除拖布的提醒信息。
在一个实施例中,地板材质信息获取模块100还用于控制清洁机器人的超声波检测器开启向地面发射超声波;接收超声波检测器根据地面反射的超声波生成的超声检测信号进行分析,得到地板材质信息。
在一个实施例中,地板材质信息获取模块100还用于控制清洁机器人的悬崖检测器开启向地面发射红外光线;接收悬崖检测器根据地面反射的红外光线生成的红外检测信号进行分析,得到地板材质信息。
在一个实施例中,防水垫安装分析模块200还用于当地板材质信息为易受潮腐坏材质时,检测清洁机器人是否开启拖地工作模式;当清洁机器人开启拖地工作模式时,在清洁机器人上桩进行充电的过程中,根据设置于充电桩的第一霍尔检测器发送的霍尔检测信号分析充电桩是否安装有防水垫。
在一个实施例中,防水垫安装分析模块200还用于当清洁机器人未开启拖地工作模式时,控制清洁机器人上桩充电。
在一个实施例中,防水垫安装分析模块200还用于检测清洁机器人是否安装拖布支架。
在一个实施例中,防水垫安装分析模块200还用于控制清洁机器人的第二霍尔检测器开启运行;根据第二霍尔检测器输出的霍尔检测信号分析清洁机器人是否安装拖布支架。
在一个实施例中,提醒信息推送模块300还用于当充电桩安装防水垫时,控制机器人上桩进行充电。
关于拖布移除提醒装置的具体限定可以参见上文中对于拖布移除提醒方法的限定,在此不再赘述。上述拖布移除提醒装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
上述拖布移除提醒装置,首先能够获取清洁机器人所处工作环境的地板材质信息进行分析;之后在地板材质信息为易受潮腐坏材质时,还能进一步结合清洁机器人上桩进行充电的充电桩是否安装有防水垫的分析判断;最终在充电桩未安装有防水垫的情况下,能够输出移除拖布的提示信息告知用户。通过上述方案,可结合实际情况,在清洁机器人上桩充电的充电桩没有安装防水垫的情况下,及时进行拖布移除提醒,从而避免充电过程中拖布长时间浸泡易受潮腐坏材质的地板,保证地板的使用寿命,有效提高清洁机器人的工作可靠性。
请参阅图7,一种清洁机器人系统,包括清洁机器人10、充电桩20以及设置于清洁机器人10的控制器11和设置于充电桩20的第一霍尔检测器21,控制器11连接第一霍尔检测器21(图未示),控制器11用于根据上述方法进行拖布移除提醒。
具体地,清洁机器人工作环境即为清洁机器人10进行清扫、拖地对应的区域。由于室内环境装修风格多样,对于不同的用户,地板装修材质选取也不完全相同,其中一些地板材质容易受潮腐坏(例如木质地板或者易生锈金属地板等),不宜长时间保持潮湿,或者说不宜长时间与水接触,否则使用寿命将会受到影响。而清洁机器人10在对地面进行清扫时,若开启拖地工作模式,此时清洁机器人10的拖布将不可避免的与地板接触。在清洁机器人10停止工作时,清洁机器人10将不会运动,而是停止在某一位置,若不及时将清洁机器人10的拖布移除,将会导致拖布长时间浸泡地板的同一位置,很容易影响地板的使用寿命。故本实施例的方案,可结合地板材质信息进行分析,最终实现清洁机器人10的拖布移除提醒。
应当指出的是,获取清洁机器人10地板材质信息的操作,可以是在清洁机器人10在工作(也即对地面进行清扫和/或拖地)过程中,清洁机器人10上相应的器件进行检测分析得到,或者是清洁机器人10停止工作后,通过设置于清洁机器人10的相应器件进行分析得到。在其它实施例中,还可以是通过用户输入,具体采用何种方式来获取清洁机器人10工作环境的地板材质信息,具体可结合用户需求进行不同选择。
易受潮腐坏材质即为长时间与水接触会发生变质,使用寿命会受到严重影响的材质。防水垫即为用来防止地板与水分(可以是清洁机器人10的拖布上遗留的水分)接触的垫子。控制器11在接收到地板材质信息之后,需要进一步分析此时的地板材质信息是否属于易受潮腐坏材质,若属于易受潮腐坏材质,则执行后续的防水垫设置检测操作;若当前材质信息不属于易受潮腐坏材质时,也就没有继续检测是否设置防水垫的必要。
可以理解,控制器11进行地板材质信息是否属于易受潮腐坏材质分析的方式并不是唯一的。在一个实施例中,控制器11预存有多种地板材质信息与相应地板材质信息是否属于易受潮腐坏材质的数据,当控制器11获取地板材质信息之后,直接与预存的数据进行匹配分析,即可以得到当前地板材质信息是否属于易受潮腐坏材质的结论。
充电桩20设置有第一霍尔检测器21,且第一霍尔检测器21与设置于清洁机器人10的控制器11通信连接。霍尔检测器即霍尔传感器,通过霍尔检测器可检测磁场的变化,进而通过磁场的变化来反映充电桩20是否安装防水垫。本实施例中,防水垫设置有磁铁,并且将霍尔检测器设置于充电桩20的防水垫安装位置处,在安装防水垫之后,霍尔检测器会检测到周围磁场发生变化,霍尔检测器将该磁场变化转换为霍尔检测信号并输出至控制器11进行分析。当控制器11接收到霍尔检测信号达到预设阈值时,即表示充电桩20安装有防水垫。
当控制器11根据接收到的霍尔检测信息进行分析,得到清洁机器人10上桩进行充电的充电桩20上并未安装防水垫之后,控制器11将会向用户推送移除拖布的提醒信息。因为在清洁机器人10所处工作环境中地板为易受潮腐坏材质,且充电桩20也并未安装防水垫时,在充电过程中将会使得清洁机器人10的拖布与地板长时间接触,此时为了避免长时间浸泡影响地板的使用寿命,此时控制器11将会推送移除拖布的提醒信息。
应当指出的是,控制器11推送移除拖布的提醒信息的方式并不是唯一的。在一个实施例中,清洁机器人10或者充电桩20还设置有信息提示装置,控制器11与信息提示装置相连接,控制器11可通过信息提示装置向用户推送移除拖布的提醒信息。根据信息提示装置的类型不同,对应的推送形式也会有所区别,具体可以以声、光等形式推送告知用户。在另一个实施例中,还可以是控制器11与用户终端通信连接,可直接将移除拖布的提醒信息推送至用户终端,以告知用户。
请参阅图8,在一个实施例中,清洁机器人系统还包括设置于清洁机器人10的第二霍尔检测器12,第二霍尔检测器12连接控制器11(图未示)。
具体地,本实施例中,在控制器11分析得到清洁机器人10工作区域的地板材质为易受潮腐坏材质时,控制器11并非直接接收霍尔检测信号进行充电桩20是否安装防水垫的检测,而是首先进行清洁机器人10是否开启拖地工作模式的检测,只有在清洁机器人10开启了拖地工作模式,才会进一步进行是否安装防水垫的检测操作。
可以理解,控制器11进行检测清洁机器人10是否开启拖地工作模式的方式并不是唯一的,在一个实施例中,可以是通过检测控制器11自身是否有拖地相关的执行命令接收或发送。在另一个实施例中,由于拖地工作模式需要安装对应的拖布支架,故还可以是通过外部检测器检测是否安装拖布支架来实现。
通过本实施例的方案,在清洁机器人10进行防水垫的检测操作之前,还会先进行清洁机器人10是否启用拖地工作模式的检测,只有在启用拖地工作模式的情况下,才会有拖布与地板长时间接触的可能,此时才会进一步执行是否安装防水垫检测的操作,否则也就没有进行是否安装防水垫检测的必要。通过本实施例的方案,可进一步提高拖布移除提醒方法的操作可靠性。
请参阅图9,在一个实施例中,清洁机器人系统还包括设置于清洁机器人10的超声波检测器13,超声波检测器13连接控制器11(图未示)。
具体地,具体地,本实施例中采用超声波检测的方式进行地板材质信息的检测操作。在清洁机器人10处于清洁工作过程中,设置于清洁机器人10的超声波检测器13可向地面发射超声波,根据地面材质的不同,被地面反射回超声波也会有所区别。超声波检测器13接收地面反射的超声波之后,经过压电转换,得到对应的超声波检测信号,并发送至控制器11。控制器11内预存有超声波检测信号与地板材质信息对应关系的超声波信号数据库,控制器11接收超声波检测信号之后,与预设的超声波信号数据库进行比对分析,即可以得到当前工作环境的地板材质信息。
上述清洁机器人系统,首先能够获取清洁机器人所处工作环境的地板材质信息进行分析;之后在地板材质信息为易受潮腐坏材质时,还能进一步结合清洁机器人上桩进行充电的充电桩是否安装有防水垫的分析判断;最终在充电桩未安装有防水垫的情况下,能够输出移除拖布的提示信息告知用户。通过上述方案,可结合实际情况,在清洁机器人上桩充电的充电桩没有安装防水垫的情况下,及时进行拖布移除提醒,从而避免充电过程中拖布长时间浸泡易受潮腐坏材质的地板,保证地板的使用寿命,有效提高清洁机器人的工作可靠性。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 拖布移除提醒方法、装置及清洁机器人系统
- 拖布移除提醒方法、装置及清洁机器人