道岔虚拟测试设备
文献发布时间:2023-06-19 11:52:33
技术领域
本申请涉及轨道列车技术领域,特别涉及一种道岔虚拟测试设备。
背景技术
道岔控制系统是保证轨道交通线路系统安全性、可靠性的关键装置,其主要作用是对道岔的各机构进行控制和检测及同上位信号系统的信息交互,保证车辆正常安全的改变线路。因此,道岔控制系统中的道岔控制程序是否可靠至关重要,相关技术中,采用道岔实物测试台架进行系统集成测试或编程软件自带仿真功能进行控制软件代码逻辑功能仿真测试。
存在以下技术问题:道岔实物测试台架的成本高、周期长。
申请内容
本申请旨在至少在一定程度上解决相关技术中的技术问题之一。
为此,本申请的目的在于提出一种基于道岔虚拟测试设备。该设备可以有效提升道岔控制程序的测试效率,降低测试成本和测试周期。
为了实现上述目的,本申请公开的一种基于道岔虚拟测试设备,包括:仿真系统、控制器和测试工作站,其中,
所述测试工作站与所述控制器通信连接,所述测试工作站用于生成测试用例,并将所述测试用例发送给所述控制器;
所述控制器预存有道岔控制程序,所述控制器用于通过所述道岔控制程序执行所述测试用例,以生成控制指令,并将所述控制指令发送给所述仿真系统;
所述仿真系统用于生成虚拟道岔台架,并根据所述控制指令控制所述虚拟道岔台架执行相应的动作,并向所述测试工作站反馈所述虚拟道岔台架执行相应的动作的结果;
所述测试工作站用于根据所述仿真系统反馈的所述虚拟道岔台架执行相应的动作的结果,判断所述道岔控制程序是否正确。
根据本申请的基于道岔虚拟测试设备,可以有效提升道岔控制程序的测试效率,降低测试成本和测试周期。
附图说明
图1为本发明一个实施例的道岔虚拟测试设备的结构框图;
图2为本发明实施例的基于道岔虚拟测试设备的道岔控制程序测试方法的流程图;
图3为本申请另一个实施例的道岔虚拟测试设备的结构框图。
具体实施方式
下面详细描述本申请的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。
以下结合附图描述根据本申请实施例的道岔虚拟测试设备及基于道岔虚拟测试设备的道岔控制程序测试方法。
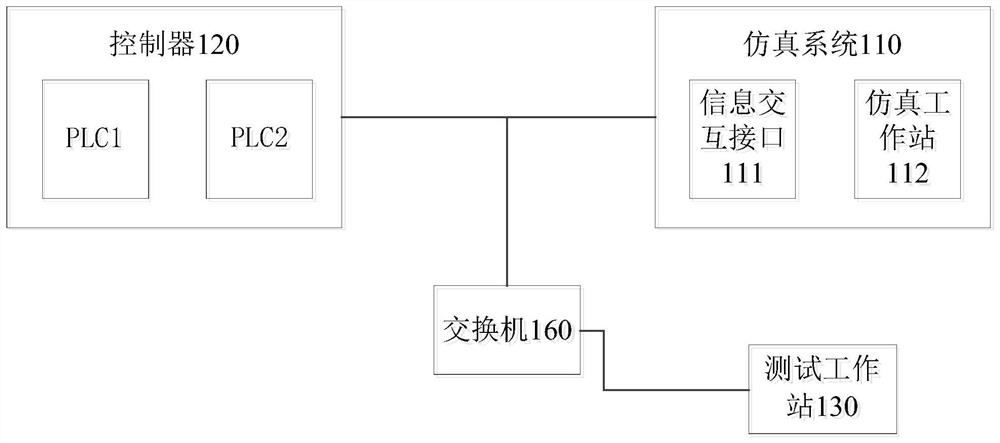
在描述根据本申请实施例的道岔控制程序测试方法之前,首先结合图1对道岔虚拟测试设备进行说明,如图1所示,道岔虚拟测试设备,包括:仿真系统110、控制器120和测试工作站130。其中,仿真系统110用于生成虚拟道岔台架,控制器120预存有道岔控制程序。
图2是根据本发明一个实施例的基于道岔虚拟测试设备的道岔控制程序测试方法的流程图。如图2所示,根据本发明一个实施例的基于道岔虚拟测试设备的道岔控制程序测试方法,包括:
S101:测试工作站生成测试用例,并将测试用例发送给控制器。
在具体示例中,测试工作站还用于对道岔控制程序进行自动化测试,以判定道岔控制程序是否正确。
具体来说,测试工作站可以根据需求文档生成测试用例,其中,所述测试用例包括多个动作命令以及一一对应于所述多个动作命令的执行时间和执行结果。
例如:需求为依次在第一时刻至第三时刻执行第一动作至第三动作,第一动作例如为控制道岔闭合至第一轨道、第二动作为控制道岔切换到第二轨道,第三动作为控制道岔切换到第三轨道。则测试用例中包括第一至第三时刻,一一对应于第一至第三时刻的第一动作至第三动作,以及一一对应于第一动作至第三动作的第一执行结果至第三执行结果。
S102:控制器通过道岔控制程序执行测试用例,以生成控制指令,并将控制指令发送给所述仿真系统。
在具体示例中,控制器通过道岔控制程序根据测试用例确定多个动作命令以及一一对应于多个动作命令的执行时间,并在当前时间到达多个动作的执行时间中的一个动作的执行时间时,向所述仿真系统发送对应于所述一个动作的执行时间的动作控制指令。即:道岔控制程序首先分析测试用例,提取出第一至第三时刻,以及一一对应于第一至第三时刻的第一动作至第三动作,然后,当达到第一时刻时,生成第一动作的控制指令,以此类推。
S103:仿真系统根据控制指令控制虚拟道岔台架执行相应的动作,并向所述测试工作站反馈所述虚拟道岔台架执行相应的动作的结果。
在具体示例中,仿真系统可以根据对应于所述一个动作的执行时间的动作控制指令控制虚拟道岔台架执行所述一个动作,并向所述测试工作站反馈所述虚拟道岔台架执行所述一个动作的结果。
S104:所述测试工作站将所述仿真系统反馈的所述虚拟道岔台架执行所述一个动作的结果,与所述测试用例中对应于所述一个动作的执行结果进行对比,判断所述道岔控制程序是否正确。
例如:所述仿真系统根据第一至第三时刻的动作控制指令控制所述虚拟道岔台架分别执行第一动作至第三动作,并向所述测试工作站反馈所述虚拟道岔台架执行第一动作至第三动作的第一至第三动作的结果;测试工作站将所述虚拟道岔台架执行第一动作至第三动作的第一至第三动作的结果,与测试用例中第一动作至第三动作的第一执行结果至第三执行结果进行对比,从而确定出道岔控制程序是否安全可靠。
假设测试用例中的第一时刻至第三时刻对应时刻1至时刻3,第一动作至第三动作对应所述虚拟道岔台架执行的三种动作,如动作1至动作3,而且,测试用例也包括有对应于动作1至动作3相对应的理论的执行结果1至执行结果3。所述仿真系统将在时刻1时虚拟道岔台架是否执行了动作1,在时刻2是否执行了动作2,在时刻3是否执行了动作3的结果反馈给所述测试工作站,所述测试工作站将所述仿真系统反馈来的结果与测试用例中的执行结果进行对比,如果两者相同,则说明虚拟道岔台架是按照道岔控制程序的执行逻辑执行的动作,即:表示道岔控制程序的执行逻辑完全正确,也就是说,道岔控制程序正确,反之,则表示虚拟道岔台架的执行逻辑存在错误,也就是说,道岔控制程序存在错误。即本申请的道岔虚拟测试设备可以简单且有效地测试出道岔控制程序的正确性。
根据本申请实施例的基于道岔虚拟测试设备的道岔控制程序测试方法,可以有效提升道岔控制程序的测试效率,降低测试成本和测试周期。
进一步地,如图3所示,道岔虚拟测试设备还包括人机交互接口140,人机交互接口140预存有人机交互程序,该方法还包括:人机交互接口接收用户的操作指令,并通过所述人机交互程序执行所述操作指令,以得到所述虚拟道岔台架执行相应的动作的指令,并将所述虚拟道岔台架执行相应的动作的指令发送给所述仿真系统,以使所述仿真系统控制所述虚拟道岔台架执行相应的动作,并且通过所述虚拟道岔台架执行相应的动作的结果确定所述人机交互程序是否正确。
例如:控制道岔虚拟测试设备在三维空间中转动、放大、缩小等,从而确定出人机交互程序是否可靠。
图1是根据本申请一个实施例的道岔虚拟测试设备的结构框图。
如图1所示,根据本申请一个实施例的道岔虚拟测试设备,包括:仿真系统110、控制器120和测试工作站130。进一步地,如图3所示,还包括人机交互接口140。
其中,所述测试工作站130与所述控制器120通信连接,所述测试工作站130用于生成测试用例,并将所述测试用例发送给所述控制器120;
所述控制器120预存有道岔控制程序,所述控制器120用于通过所述道岔控制程序执行所述测试用例,以生成控制指令,并将所述控制指令发送给所述仿真系统110;
所述仿真系统110用于生成虚拟道岔台架,并根据所述控制指令控制所述虚拟道岔台架执行相应的动作,并向所述测试工作站130反馈所述虚拟道岔台架执行相应的动作的结果;
所述测试工作站130用于根据所述仿真系统110反馈的所述虚拟道岔台架执行相应的动作的结果,判断所述道岔控制程序是否正确。
当然,测试工作站130还可以监测人机交互程序的执行状态,例如:监测出第一时刻至第三时刻,以及在第一时刻至第三时刻执行的动作情况。例如:假设第一时刻至第三时刻对应时刻1至时刻3,第一动作至第三动作对应人机交互程序的三种执行状态,则可以通过观测时刻1至时刻3人机交互接口的三种执行状态来确定人机交互程序是否正确。
其中,人机交互接口140与仿真系统110通信,人机交互接口140预存有人机交互程序,所述人机交互接口140用于接收用户的操作指令,并通过所述人机交互程序执行所述操作指令,以得到所述虚拟道岔台架执行相应的动作的指令,并将所述虚拟道岔台架执行相应的动作的指令发送给所述仿真系统110,以使所述仿真系统110控制所述虚拟道岔台架执行相应的动作。
其中,仿真系统110建立虚拟道岔台架,并对虚拟道岔台架进行优化,以及建立虚拟道岔台架所需的智能逻辑组件,并创建检测智能逻辑组件运行的传感器。其中,仿真系统110包括:信息交互接口111和仿真工作站112。其中,信息交互接口111用于显示虚拟道岔台架以及虚拟道岔台架执行相应的动作(道岔运动),以通过虚拟道岔台架执行相应的动作的情况观测所述道岔控制程序是否正确。仿真工作站112用于生成虚拟道岔台架,并根据控制指令控制虚拟道岔台架执行相应的动作(道岔运动)。
作为一个具体的示例,信息交互接口111例如包括LED电视机,通过LED电视机显示3D的虚拟道岔台架,进而,可以通过信息交互接口111直观动态地观测虚拟道岔台架以及虚拟道岔台架的道岔运行情况,进而观测并确定所述道岔控制程序是否正确。
作为一个具体的示例,仿真工作站112可采用Tecnomatix平台实现,仿真工作站112可以对3D的虚拟道岔台架进行处理优化,例如:对3D的虚拟道岔台架中运动零部件部进行规划与验证、装配规划与验证、运动机构的规划、道岔工艺的规划分析与验证、运动干涉分析、虚拟调试与测试等。具体地,可通过控制器120的道岔控制程序对虚拟道岔台架进行控制,使虚拟道岔台架执行相应的动作(道岔运动),当然还可以向控制器120中反馈相应的动作(道岔运动)情况,如:执行的动作和执行的动作的时间。当然,也可以通过虚拟道岔台架进行安全互锁等功能的验证,并通过信息交互接口111呈现。
作为一个具体的示例,控制器120为2乘2取2冗余结构。在具体示例中,控制器包括两个PLC控制器(即:可编程逻辑控制器,Programmable Logic Controller)。如图3所示,两个PLC控制器为PLC1和PLC2,两个PLC控制器中一个PLC控制器(如PLC1)生成的控制指令用于对两个PLC控制器中另一个PLC控制器(如PLC2)生成的控制指令进行校验。
具体来说,以包括两个PLC控制器(即:PLC1和PLC2)的控制器120为例,则两个PLC控制器作为道岔控制程序执行的载体。道岔控制程序编译完成后分别下载到两个PLC控制器中,在两个PLC控制器执行完整的道岔控制程序的运算。
当然,控制器120还可以包括多个PLC控制器,其中,所述多个PLC控制器中一部分的PLC控制器生成的控制指令用于对剩余部分的PLC控制器生成的控制指令进行校验,以确定所述另一部分的PLC控制器生成的控制指令是否正确。
此外,人机交互接口140作为人机交互程序执行的载体。作为一个具体的示例,人机交互接口140可为触摸屏HMI(即:人机界面,Human Machine Interface),触摸屏HMI中执行人机交互程序。人机交互程序编译后下载到触摸屏HMI中,从而完成人机交互程序的运算。
结合图3所示,作为本申请另一个实施例,道岔虚拟测试设备,还包括:IO模块仿真器150,IO模块仿真器150与控制器120通信连接,IO模块仿真器150用于扩展普通IO和安全IO节点的仿真,并为控制器120提供虚拟的IO信号。例如:IO模块仿真器150采用Simulationunit,用于扩展普通IO及安全IO节点的仿真,并且,可以为控制器120提供虚拟的IO信号,从而,控制器120可以进一步验证道岔控制程序是否可靠,其中,IO至输入输出。
作为一个具体的示例,道岔虚拟测试设备,还包括:交换机160,所述交换机160分别与所述仿真系统110、所述控制器120、所述人机交互接口140、所述测试工作站130和所述IO模块仿真器150通信。即:交换机160作为通信的中转站,完成仿真系统110、所述控制器120、所述人机交互接口140、所述测试工作站130和所述IO模块仿真器150之间的通信服务。测试工作站130可以通过OPC通信协议监测所述道岔控制程序和所述人机交互程序的执行状态。
在具体示例中,交换机160可采用工业交换机,交换机160主要是组建局域网,为仿真系统110、所述控制器120、所述人机交互接口140、所述测试工作站130和所述IO模块仿真器150提供信息交互链路,其中仿真系统110、所述控制器120、所述人机交互接口140、所述测试工作站130和所述IO模块仿真器150之间进行数据交互。
在具体应用中,测试工作站130可以根据需求文档生成测试用例。
作为一个具体的示例,测试工作站130的功能包括:测试用例的编写,道岔控制程序的自动化测试(判断所述道岔控制程序是否正确),以及道岔控制程序的编译、下载及控制器120的输入、输出信号的监控等。
在具体示例中,测试用例包括多个动作命令以及一一对应于所述多个动作命令的执行时间和执行结果。
进一步地,控制器120通过所述道岔控制程序根据所述测试用例确定多个动作命令以及一一对应于所述多个动作命令的执行时间,并在当前时间到达所述多个动作的执行时间中的一个动作的执行时间时,向所述仿真系统发送对应于所述一个动作的执行时间的动作控制指令。
进一步地,所述仿真系统110用于根据对应于所述一个动作的执行时间的动作控制指令控制所述虚拟道岔台架执行所述一个动作,并向所述测试工作站130反馈所述虚拟道岔台架执行所述一个动作的结果;
所述测试工作站130用于通过将所述仿真系统110反馈的所述虚拟道岔台架执行所述一个动作的结果,与所述测试用例中对应于所述一个动作的执行结果进行对比,判断所述道岔控制程序是否正确。
在具体示例中,测试工作站130的测试用例编写以及道岔控制程序的自动化测试(判断所述道岔控制程序是否正确),可以通过Labview软件完成。其中,采用Labview软件编写测试用例的具体方法,本领域技术人员在不付出创造性劳动的基础上就可根据测试的需求文档完成,在此不做赘述。需要说明的是,Labview可通过OPC通信协议读写控制器120及仿真工作站112的输出信号,并且,可以对测试用例进行管理。
在具体示例中,道岔控制程序的编译、下载及控制器120的输入、输出信号的监控等,可通过现有技术完成。
在具体应用中,道岔系统虚拟测试台架可在仿真工作站中通过Tecnomatix完成道岔部件模型的建立、物理属性的定义、运动属性的定义、运动仿真序列的创建,从而实现虚拟仿真运动。由于仿真工作站无法对控制器120(PLC控制器)的安全IO进行访问,需通过Simulation unit来仿真控制系统安全硬件。道岔控制程序和人机交互程序通过TIAPortal下载到控制器120和人机交互接口140,并通过交换机160进行硬件通信连接。在具体示例中,在控制器120的组态时,需要创建本地OPC服务器,通过OPC通信协议建立仿真工作站同控制器的连接,使仿真工作站中的智能组件和控制器的输入输出建立有机的链接,使测试工作站通过OPC通信协议实时访问控制器、人机交互接口140及仿真工作站的输入输出数据。Process Simulate中的输出参数是控制器中的输入控制条件指令,控制器输出指令作为控制Process Simulate运动状态的输入数据;再利用OPC Server完成仿真工作站与控制器120、测试工作站130和人机交互接口140等之间的通信,最终完成虚拟道岔台架的道岔运动(执行相应动作)。测试工作站130输出测试用例的执行结果,并将测试用例的执行结果与所述仿真系统110反馈来的所述虚拟道岔台架执行相应的动作的结果进行对比,从而,确定道岔控制程序是否正确。由于上述仿真所用软件均为现有技术,在此不做赘述。
另外,根据本发明实施例的道岔虚拟测试设备的具体实现方式与本发明实施例的基于道岔虚拟测试设备的道岔控制程序测试方法类似,具体请参见方法部分的描述,为了减少冗余,不做赘述。
本申请的道岔虚拟测试设备,可以有效提升道岔控制程序的测试效率,降低测试成本和测试周期。
进一步地,本申请的实施例公开了一种道岔测试设备,包括:根据上述任意一个实施例所述的道岔虚拟测试设备。该道岔测试设备可以有效提升道岔控制程序的测试效率,降低测试成本和测试周期。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施例或示例中。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本申请的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
尽管上面已经示出和描述了本申请的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本申请的限制,本领域的普通技术人员在本申请的范围内可以对上述实施例进行变化、修改、替换和变型。
- 道岔虚拟测试设备
- 一种用于虚拟轨道车辆的虚拟道岔系统及方法