磁停车传感器
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及一种磁停车传感器。本发明还涉及一种用于制造磁停车传感器的方法。本发明还涉及一种用于求取停车位的可用性状态的方法。本发明还涉及一种计算机程序产品。
背景技术
在车辆交通方面,停车是对交通拥堵和城市景观具有显著影响的一大问题。停车空间的减少越来越多地导致全自动化的和机械的停车系统的发展,然而其中,这些系统也由于其制造成本和维护成本而受到限制。
APLM(英语:automated parking lots management,自动化停车位管理)环境中的磁信号强度分析是高度非线性问题,并且能够通过自适应结构基于参考测量来进行近似。
Katai I.所著的《Generalized number systems in Euclidean spaces》(Math,and Comp.第38修订版,2003年,第883页)和Katai I.、Szabo J.所著的《Canonical numberSystems for complex integers》(Acta Sci.Mth.Szeged,第37期,1974年)公开一种用于将数值映射到数空间的数学理论。
Bunde A.、S.Haviin所著的《Fractals and disordered Systems》(Springer出版社,柏林,海德堡,1991年)公开了介观尺度的无序效应并且提出以数学语言描述这种效应的工具。
发明内容
本发明的任务在于提供一种改善的磁停车传感器。
根据第一方面,该任务借助一种磁停车传感器来解决,该停车传感器具有:
检测装置,其用于以三个坐标检测停车位区域中的地磁测量值;
先进先出型存储装置,地磁测量值能够被加载到该先进先出型存储装置中,其中,能够针对先进先出型存储装置中的磁测量值中的每个求取磁可变性
求取装置,其设置用于将地磁测量值的x分量和y分量映射成复数,其中,所述复数能够根据定义数量的地磁测量值的可变性进行求取,并且该求取装置设置用于定义数制(Zahlensystem),该数制具有定义数量的元素,这些元素相应于地磁测量值的可变性并且相应于所述复数,并且该求取装置设置用于通过求取以下多项式的根λ
λ
其中,n表示地磁测量值的可变性,λ表示数论辅助变量(“伊藤变量”)。
其中,2×log(λ
以这种方式,借助磁停车传感器能够实现对停车位的可用性状态的易于执行的求取,因为复数能够非常简单地以复数表示进行表示。“简单性”体现在:将两个分量(磁x和磁y)视为复数并由此简化运算(乘法、加法等)。否则,必须将这些分量视为两元素的向量。此外,传统微控制器例如也使用复杂算术,使得能够简单地执行求取。由此,该方法能够在具有有限计算能力的电池运行的微控制器中简单实现,该微控制器借助合适的编程语言,例如汇编语言、C、C++等进行编程。由此,即使在不利运行条件下,也支持磁停车传感器在现场的长运行时间。
有利地,为了求取停车位的可用性状态,不需要大开销的计算操作(例如小波变换等)。其结果是,磁测量中的度量(Metrik)被映射到复数基(komplexe Zahlenbasis)中,其中,将先进先出型存储装置用于分别提供最新测量值,并由此考虑到对地磁测量的变化的物理影响、结构影响、通信影响、材料影响等。
根据第二方面,该任务借助一种用于制造磁停车传感器的方法来解决,该方法具有以下步骤:
提供检测装置,其用于以三个坐标检测停车位区域中的地磁测量值;
提供与检测装置功能性连接的先进先出型存储装置,地磁测量值能够被加载到该先进先出型存储装置中,其中,能够针对先进先出型存储装置中的磁测量值中的定义数量的磁测量值的x分量和y分量求取磁可变性;
提供与先进先出型存储装置功能性连接的求取装置,该求取装置设置用于将地磁测量值映射成复数,其中,复基数能够根据地磁测量值的可变性进行求取,并且该求取装置设置用于定义数制,该数制具有定义数量的元素,这些元素相应于地磁测量值的可变性并且相应于所述复基数,该求取装置还设置用于通过求取多项式λ
根据第三方面,该任务借助一种用于求取停车位的可用性状态的方法来解决,该方法具有以下步骤:
三维地检测停车位区域中的地磁测量值;
将地磁测量值加载到先进先出型存储装置中;
针对先进先出型存储装置中的磁测量值中的定义数量的磁测量值的x分量和y分量求取磁可变性;
将地磁测量值映射成复数,其中,根据地磁测量值的可变性求取这些复数,并且定义数制,该数制具有定义数量的元素,这些元素相应于地磁测量值的可变性并且相应于所述复数;
通过求取多项式λ
磁停车传感器的优选扩展方案是从属权利要求的主题。
有利的磁停车传感器的特征在于,将三维磁测量值的x分量和y分量映射到定义的复数基1-i中。以这种方式,使用经验证的复数基来映射x分量和y分量,使得能够实现停车位可用性状态的可靠求取。借助该数基,可以特别良好地执行停车位的已占用/未占用的区分。这是基于大量系列测量,通过在离线分析中进行大量检查所确定的。
磁停车传感器的另一有利扩展方案的特征在于,借助求取装置能够以定义的时间间隔内执行计算。由此,有利地支持磁停车传感器的节能运行,由此能够实现磁停车传感器的长运行时间。
磁停车传感器的另一有利扩展方案的特征在于,先进先出型存储装置构造用于二的次幂个地磁测量值。由此,可以分别使用最新的地磁测量值。通过二次幂,可以在编程技术上以简单的方式(通过改变指数)改变先进先出型存储装置的容量。由此有利地支持:能够根据指数调整探测率。这种方式可以有利地确定磁停车传感器的探测精度的大小。磁停车传感器的另一有利扩展方案的特征在于,先进先出型存储装置构造用于二的次幂个地磁测量值,优选用于128个或256个或512个或1024个测量值。由此,可以有利地实现磁停车传感器的非常高的探测精度。
附图说明
在下文中根据多个附图以其他特征和优点详细描述本发明。相同的或功能相同的元素具有相同的附图标记。附图尤其旨在说明对于本发明重要的原理而不一定按比例实施。为清楚起见可以设置,并非在全部附图中绘制出附图标记。
所公开的方法特征类似地由相应公开的设备特征得出,反之亦然。这尤其表示,关于磁停车传感器的特征、技术优点和实施方案以类似的方式由关于用于制造磁停车传感器的方法或者关于用于求取停车位可用性状态的方法的相应实施方案、特征和优点得出,反之亦然。
在附图中示出:
图1示出理想磁停车传感器信号;
图2示出实际磁停车传感器信号;
图3以三个笛卡尔坐标示出实际磁停车传感器信号;
图4针对停车位的已占用状态示出所提出的方法的工作方式的原理性图示;
图5示出针对停车位的空闲状态示出所提出的方法的工作方式的原理性图示;
图6示出所提出的磁停车传感器的一种实施方式的原理性方框图;
图7示出用于制造所提出的磁停车传感器的方法的原理性流程。
具体实施方式
本发明的核心构思尤其在与:提出一种基于磁信号分析的低成本磁停车传感器。
图1示出磁停车传感器(未示出)的信号S的理想时间变化过程。可以看出,信号S在理想情况下为矩形,其中,矩形信号的上值表示停车位的已占用状态,矩形信号的下值表示停车位的空闲状态。显然,所提到的分配也可以是相反的(即上值相应于空闲状态,下值相应于占用状态,未示出)。在这种情况下,信号S的可变性为1。
与之对照,图2示出磁停车传感器信号S的实际时间变化过程。可以看出,该信号基本上强振荡地但具有矩形分量地形成,这例如由于地磁影响、环境影响、天气影响、地理影响、其他车辆的影响等所造成。因此其结果是,磁停车传感器的实际信号S的可变性V显著更高、例如约100至120。可变性V在此理解为:地磁信号S如何随机地或者“混沌”地形成。借助Haar小波(矩形基)将可变性V计算为等矩形函数(幅度和相位相同)的“距离”。这表示,值100表示与Haar小波(矩形函数)的偏差强度。在信号无干扰的情况下,可变性为1(如图2的信号的情况)。在强干扰的情况下,可变性可以直至100甚至更高(如图3的信号S的情况)。
图3在三个坐标方向x、y、z上示出实际磁停车传感器的信号S。在坐标x、y和z方向上的各个分量是强振荡的,这表示磁信号S在总体上的高可变性。
提出以特殊方式对磁信号S在所有坐标x、y、z上已知的可变性进行分析处理。首先,借助检测装置10(未示出)将地磁信号的所检测的测量值的x分量和y分量写入到先进先出型存储装置20(例如环形存储器)中,该存储装置构造为具有二次幂的大小。在此,二次幂例如是128、优选为25、更优选为512或1024。通过二次幂,可以在编程技术上以简单方式(通过改变指数)改变先进先出型存储装置的容量。先进先出型存储装置20的该值越大,则所提出的用于识别停车位可用性状态的方法就越可靠。
先进先出型存储装置20的大小还取决于所提出的磁停车传感器所使用的硬件的计算能力,由系统决定地,该硬件经常仅具有低的电池资源和计算资源,并且设置用于在现场持续长时间使用。所提出的磁停车传感器的计算单元优选构造为本身已知的微控制器或者微处理器,该微控制器或微处理器以汇编代码编程。
基于对具有特定地磁特性的地理位置处的大量(例如几百次的)实验的离线分析,求取所检测的测量值M的可变性V并且选择复数基b,该地磁测量值M被映射到该复数基中。
此外,定义具有定义数量(例如128或256或512或1024或其他二次幂)的测量值M的域F,其大小取决于地磁信号S的可变性V。所述数量的域元素F=x+i*y表示地磁测量值,其中,x表示实部(磁x值),y表示虚部(磁y值)。
现在,基于Katai和Szabo在Acta Math Sci Szeged(1974年)中的已知学说以通用数制(b,F)的形式来表示域F。
数制的边界(b,F)=∑a
2log(λ
其中,n表示可变性,λ
在此,a、b、k为整数,使得∑a
现在,通过求取多项式λ
在具有相应幅度|b|>1的各个复数x+i*y中,可以在使用系数0、1、2,……,N-1的情况下表示正整数。
在所提出的用于求取停车位的可用性状态的磁停车传感器中,将复数基的概念扩展到复数,即复数z=x+i*y,其中x和y是借助复数基b以z=∑a
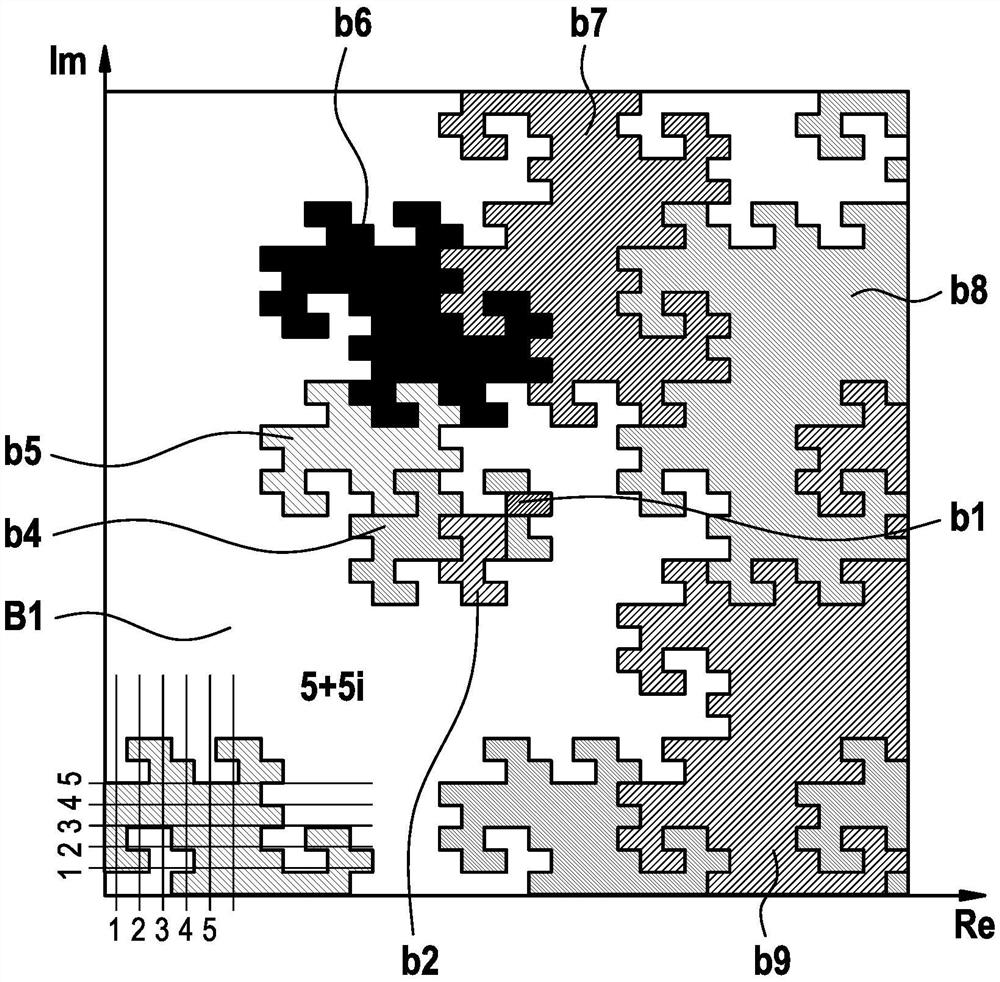
可以在复平面上以以下方式将复数基b=n+/-i的复数表示可视化,这例如在图4中示例性示出:
将整个平面划分为相应于复数的相同四边形,然后以阴影标注这些四边形,在使用数0、1、2,……,n
在图4中,相应于复数基b的数(优选在使用数0、1的情况下,b=1-i)的所有正方形都以阴影标注。不同阴影表明延伸长度。
由图4可看出,该“拼图”并未完全覆盖整个区域,而是区域b1...b9的螺旋形继续向外延伸。
因此,不能通过复数基b=1-i表示值-1。由此,负的磁测量值是不被允许的并且因此无法通过所提出的方法来表示。因此其结果是,所提出的方法仅允许用于正的地磁测量值M。
以类似的方式,复数基1+i得出螺旋线,其表示由1-i所获得的图形的实轴的映射(未示出)。图4因此原理性地示出所提出的方法的工作方式。可以看出未以阴影标注的浅色区域B1以及各个四边形的区域b1...b9,这些四边形表示地磁信号S到复数基b的映射。因此其结果是,由对浅色区域B1至阴影区域b1……b9的整体边界走向的分析,能够推断出停车位的可用性状态。区域B1相对于其他区域b1……b9的整体的高度崎岖或分形的边界区域尤其表示停车位的已占用状态。
以这种方式能够通过图4看出,为了表示具有可变性V的地磁测量值M,替代非常多的区域,仅需要有限数量的区域(图4中:9个区域b1……b9),以便在很大程度上覆盖区域B1。在数基b=1-i的情况下检查这9个区域,由此可以以简单的方式满足微控制器领域中用于实现所提出的方法的实时性要求。大量离线分析表明,通过九个区域,基本上能够根据“自相似表面”原则完全地表征分形表面的多样性。
这考虑到以下事实:所提出的方法在具有有限计算能力和有限能量供给的计算单元中实现,其中必须以较长使用寿命运行简单数学运算。对于图4中停车位的已占用状态识别而言重要的是,在区域B1与其他区域b1...b9的整体之间的边界区域非常分形地或崎岖地形成。
如此选择复数基b,使得区域B1最大。这是根据测量实现的,其中,能够最佳地实现停车位的已占用状态与非占用状态之间的区分。
图5示出停车位的空闲状态或者说未占用的状态,其中可以看出,现在白色区域B1相对于其他区域b1……b4的整体的边界走向基本上比图4中更平滑地形成,并且因此表示停车位的空闲状态,其中,在这种情况下也对所有九个区域b1……b9进行分析。
因此其结果是,借助磁停车传感器100可以以简单的方式实现:通过求取分形边界走向的形成来确定停车位是空闲的还是已占用的。
在一种有利构型中可以设置,多个磁停车传感器100彼此联网并且以这种方式构成如下系统:该系统能够将用户引导到空闲停车位。
图6示出所提出的磁停车传感器100的一种实施方式的原理性方框图。
可以看出检测装置10,其用于以三个坐标x、y、z检测停车位区域中的地磁测量值M。
与检测装置10功能性连接的是先进先出型存储装置20,地磁测量值M的x分量和y分量能够被加载到该存储装置中,其中,能够针对先进先出型存储装置20中的磁测量值M中的定义数量的磁测量值求取磁可变性V。
与先进先出型存储装置20功能性连接的是求取装置30,该求取装置设置用于将地磁测量值M(x+i*y)映射到复基数b中,其中,该复基数b能够根据地磁测量值M的可变性V进行求取,并且该求取装置设置用于定义数制(b,F),该数制具有定义数量的元素n,这些元素相应于地磁测量值M的可变性V并且相应于所述复基数b,并且该求取装置设置用于通过求取多项式λ
磁停车传感器100优选以定义的时间间隔、例如每10s执行停车位可用性状态的求取。
该方法构造成计算机程序产品,其具有用于在磁停车传感器100上实施该方法的优选以汇编语言、C、C++等编码的软件程序形式的代码单元。
图7示出用于制造所提出的磁停车传感器100的方法的流程。
在步骤200中,提供以三个坐标x、y、z检测停车位区域中的地磁测量值M的检测装置10。
在步骤210中,提供与检测装置10功能性连接的先进先出型存储装置20,地磁测量值M的x分量和y分量能够被加载到该存储装置中,其中,能够针对先进先出型存储装置20中的磁测量值M中的定义数量的磁测量值求取磁可变性V。
在步骤220中,提供与先进先出型存储装置20功能性连接的求取装置30,该求取装置设置用于将地磁测量值M映射到复基数b中,其中,该复基数b能够根据地磁测量值M的可变性进行求取,并且该求取装置设置用于定义数制(b,F),该数制具有定义数量的元素n,这些元素相应于地磁测量值M的可变性并且相应于所述复基数;并且该求取装置设置用于通过求取多项式λ
综上所述,借助本发明提出一种具有有利的所谓的分离基(例如1-i)的磁停车传感器,其实现对停车位的已占用状态和未占用状态之间的区别的清楚识别。有利地,可以将用于物联网应用的低成本微机电系统(MEMS)传感器用于所提出的停车传感器。
尽管已在上文中根据具体实施例描述本发明,但本领域技术人员也可以在不偏离本发明核心的情况下,实现上文中未公开或仅部分公开的实施方式。
- 磁停车传感器
- 磁桥型电流传感器及磁桥型电流检测方法、以及用于该传感器与检测方法的磁桥