一种采用双支腿结构的履带行走支腿机构
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及支腿技术领域,具体涉及一种采用双支腿结构的履带行走支腿机构。
背景技术
随着我国基础设施建设规模的迅速发展,各种水工构筑物、水利工程等建设项目日益增加,在水工构筑物、水利工程等建设项目的施工过程中,涉及到水下铺石、平整等基础施工作业。
目前国内外采用较多的是船舶运载和抛填石料,再以人工潜水作业对抛填石料进行平整,该种施工方式不仅受风浪影响极大,施工天数少,影响工程的整体进度,而且劳动强度大,施工安全性差且作业效率低。
为实现机械化、自动化、智能化施工,现有技术中,出现了一些水下铺石机器人,水下铺石机器人通常采用履带行走(底盘),在履带行走上需设置支腿机构,以便支持机身主体等结构。
现有的水下铺石机器人履带行走支腿机构采用的是单支腿结构,在整机下潜或上浮时,履带底盘容易绕铰点产生较大角度的偏转并缺乏调整手段,若履带底盘偏转较大角度并接触地面,会对履带底盘产生较大冲击,极易损坏支腿机构。
发明内容
有鉴于此,本发明的目的是提供一种适用于水下铺石机器人的采用双支腿结构的履带行走支腿机构,解决现有单支腿行走机构在下潜时履带底盘容易在水流冲击下绕铰点产生较大角度的偏转的问题,使设备的行走机构更加合理,避免因履带过度偏转带来的设备损坏问题,提升了设备的安全性。
本发明通过以下技术手段解决上述问题:一种采用双支腿结构的履带行走支腿机构,包括支腿、履带底盘和与履带底盘固定连接的连接座,所述支腿包括固定支腿和活动支腿,所述固定支腿包括竖向滑动套接的固定支腿外筒和固定支腿内筒,所述活动支腿包括竖向滑动套接的活动支腿外筒和活动支腿内筒,所述固定支腿内筒与活动支腿内筒之间通过补偿油缸连接;所述活动支腿内设置有支腿油缸,所述支腿油缸的缸筒与活动支腿外筒连接,所述支腿油缸的活塞杆与活动支腿内筒连接;所述连接座上开设有腰型孔,所述固定支腿内筒通过调节销轴与腰型孔匹配连接,所述活动支腿内筒通过连接销轴与连接座连接。
进一步,所述支腿油缸的缸筒顶部设置有支腿油缸座,所述支腿油缸座通过螺栓与活动支腿外筒的顶部固定连接。
进一步,所述支腿油缸的缸筒顶部通过缸筒销轴与支腿油缸座连接。
进一步,所述支腿油缸的活塞杆底部通过活塞杆销轴与活动支腿内筒连接。
进一步,所述固定支腿外筒和活动支腿外筒之间通过横梁连接。
进一步,所述固定支腿外筒、固定支腿内筒、活动支腿外筒和活动支腿内筒均为矩形筒状结构。
本发明的有益效果:
本发明的采用双支腿结构的履带行走支腿机构,包括支腿、履带底盘和与履带底盘固定连接的连接座,所述支腿包括固定支腿和活动支腿,所述固定支腿包括竖向滑动套接的固定支腿外筒和固定支腿内筒,所述活动支腿包括竖向滑动套接的活动支腿外筒和活动支腿内筒,所述固定支腿内筒与活动支腿内筒之间通过补偿油缸连接;所述活动支腿内设置有支腿油缸,所述支腿油缸的缸筒与活动支腿外筒连接,所述支腿油缸的活塞杆与活动支腿内筒连接;所述连接座上开设有腰型孔,所述固定支腿内筒通过调节销轴与腰型孔匹配连接,所述活动支腿内筒通过连接销轴与连接座连接。本申请的履带行走支腿机构,解决现有单支腿行走机构在下潜时履带底盘容易在水流冲击下绕铰点产生较大角度的偏转的问题,使设备的行走机构更加合理,避免因履带过度偏转带来的设备损坏问题,提升了设备的安全性。
附图说明
下面结合附图和实施例对本发明作进一步描述。
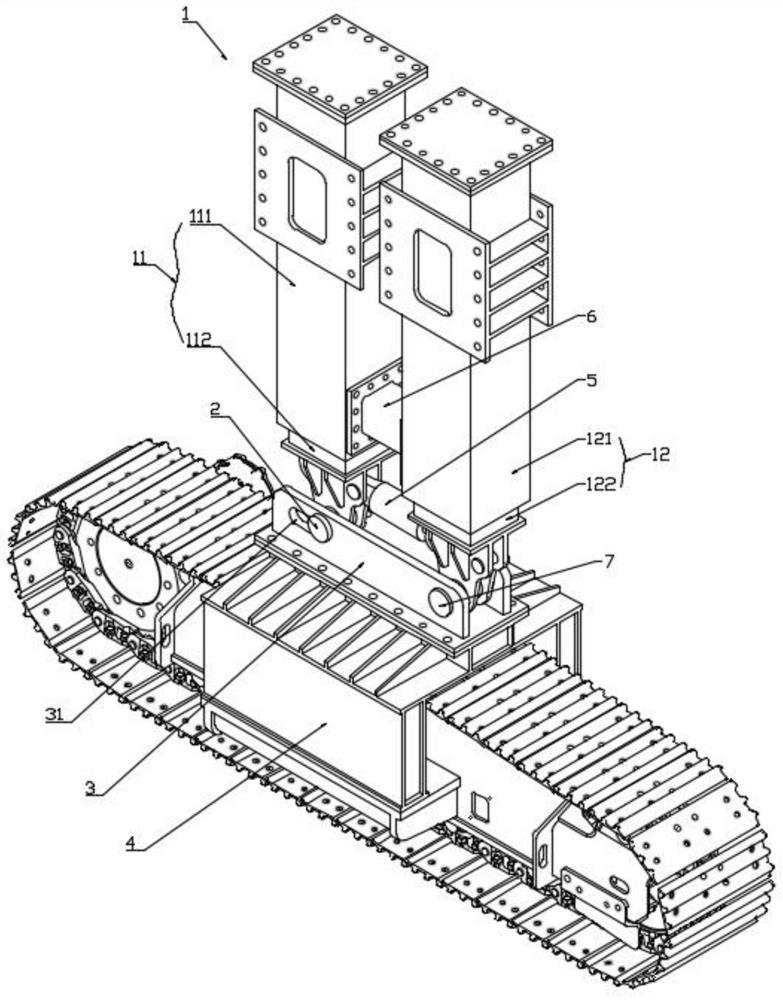
图1为本发明优选实施例的整体结构示意图;
图2为活动支腿的剖视图。
具体实施方式
以下将结合附图和实施例对本发明进行详细说明。
如图1-2所示,本实施例的采用双支腿结构的履带行走支腿机构,包括支腿1、连接座3和履带底盘4,所述支腿1包括固定支腿11和活动支腿12,所述固定支腿11包括竖向滑动套接的固定支腿外筒111和固定支腿内筒112,所述活动支腿12包括竖向滑动套接的活动支腿外筒121和活动支腿内筒122,所述固定支腿外筒111和活动支腿外筒121之间通过横梁6连接,以便提高结构的整体性和稳定性,所述固定支腿内筒112与活动支腿内筒122之间通过补偿油缸5连接,补偿油缸5具有一定的初始背压,提供初始拉力,防止固定支腿内筒112与活动支腿内筒122因力臂过长,受水流冲击产生变形,提高了结构的稳定性;同时,在行驶过程中,当履带底盘遇坡产生角度变化时,补偿油缸5也能进行自适应的伸缩。
所述活动支腿12内设置有支腿油缸126,所述支腿油缸126的缸筒顶部通过缸筒销轴125连接有支腿油缸座123,所述支腿油缸座123通过螺栓124与活动支腿外筒121的顶部固定连接;所述支腿油缸126的活塞杆底部通过活塞杆销轴127与活动支腿内筒122连接。行走支腿机构下潜或上浮时,支腿油缸可以提供一定的拉(压)力使履带底盘不会绕调节销轴有较大程度的上下偏摆,控制了履带底盘的落地姿态。
所述连接座3上开设有腰型孔31,所述固定支腿内筒112的底部通过调节销轴2与腰型孔31匹配连接,调节销轴2可相对腰型孔31滑动;所述活动支腿内筒122的底部通过连接销轴7与连接座连接。
所述固定支腿外筒、固定支腿内筒、活动支腿外筒和活动支腿内筒均为矩形筒状结构,避免了套接构件之间的相对旋转,进一步提高了结构的稳定性。
综上所述,采用本实施例的履带行走支腿机构,解决现有单支腿行走机构在下潜时履带底盘容易在水流冲击下绕铰点产生较大角度的偏转的问题,使设备的行走机构更加合理,避免因履带过度偏转带来的设备损坏问题,提升了设备的安全性。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种采用双支腿结构的履带行走支腿机构
- 一种采用双支腿履带行走底盘的水下铺石机器人