用于中压和/或高压开关装置的接地开关和相应的开关装置
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及一种用于中压和/或高压开关装置的接地开关,其中,为了将开关装置的触头元件接地,接地开关具有可运动的开关元件和布置在开关元件的自由端上的触头装置,该触头装置包括用于电气接触触头元件的主触头和辅助触头,其中,开关元件在第一位置与第二位置之间来回运动,在第一位置中主触头和辅助触头都不电气接触触头元件,在第二位置中主触头和辅助触头都电气接触触头元件,并且其中,触头元件具有用于与辅助触头电气接触的结构。
本发明还涉及一种相应的开关装置,其具有这种接地开关。
背景技术
当使用接地开关接通和关断耦合电流时,根据电压等级并且尤其是在关断时(由连续流动的电流引起),会出现开关电弧。尤其是从420kV电压等级开始,开关电弧可以在接地开关的整个关断路径上延伸,或者只能在接地电路装置的停止之后才会在“关”位置热熄灭。
为了保护主触头系统免受由开关电弧(电弧基点)造成的损坏,在开关设备中安装辅助触头系统是很常见的,保护主触头系统免受由开关电弧造成的损坏。如有必要,还需要保护相邻的开关设备部件免受开关电弧的影响,因为开关电弧在热扩散时会转换到相邻的开关设备部段中并且可能损坏相邻的设备部件或例如引起短路。
文献DE 199 49 493 Al示出一种用于中压开关装置的接地开关,其中,为了将开关装置的接触件接地,接地开关具有可运动的开关元件和布置在开关元件的自由端上的触头装置,该触头装置包括两个作为主触头的接触刀片和作为辅助触头的预点火喇叭,用于电气接触接触件,其中,开关元件在第一位置与第二位置之间可来回运动,在第一位置中主触头和辅助触头均未电气接触接触件,在第二位置中主触头和辅助触头都电气接触接触件,并且其中,接触件具有设计成缝隙的用于与辅助触头电气接触的结构。在接通接地开关时,辅助触头相对于主触头用作超前的触头。
发明内容
本发明所要解决的技术问题是,提供使接地开关非常突然地断开的措施。
该技术问题通过独立权利要求的特征来解决。有利的设计方案在从属权利要求中给出。
在按照本发明的用于中压和/或高压开关装置的接地开关中,其中,为了将开关装置的触头元件接地,接地开关具有可运动的开关元件和布置在开关元件的自由端上的触头装置,该触头装置包括用于电气接触触头元件的主触头和辅助触头,其中,开关元件在第一位置与第二位置之间来回运动,在第一位置中主触头和辅助触头都不电气接触触头元件,在第二位置中主触头和辅助触头都电气接触触头元件,并且其中,触头元件具有用于与辅助触头电气接触的结构,在该接地开关中规定,辅助触头由触头装置的弯曲刚性的臂形成,其中,主触头固定不动地布置在触头装置的内部。
现在,形成辅助触头的弯曲刚性的臂可以这样与触头元件的用于与辅助触头电气接触的结构配合,使得其在接地开关断开时利用弹性快速运动与触头元件脱开。以这种方式,接地开关在主触头已经相对较远地离开触头元件的时刻非常突然地断开。
触头开关一般理解为触头开关的元件的布置,也即理解为触头开关装置。因此,这些元件中的一个是触头元件,该触头元件具有用于与辅助触头电气接触的结构。该元件在触头开关的断开位置中与触头开关的其他元件分开。
存在主触头系统以及辅助触头系统,主触头系统具有主触头和触头元件作为触头和配对触头,辅助触头系统具有辅助触头和触头元件的结构作为触头和配对触头。
按照本发明优选的设计方案,触头元件的用于与辅助触头电气接触的结构被设计为可由弯曲刚性的臂从后面咬合的、具有导入斜面的后抓握结构。该结构尤其是钩头结构,也即以钩头形式的结构。由于这种形状,辅助触头在接地开关闭合时经由导入斜面平缓地进入后抓握结构上的相应的后抓握位置中,并且在接地开关断开时突然从触头元件上弹开或甩开。
尤其规定,主触头和辅助触头被布置成,使得辅助触头被设计为超前的辅助触头,该超前的辅助触头在接地开关闭合时在主触头之前接触触头元件。
按照本发明的另一个优选的设计方案,接地开关可运动地支承在基座元件上。在此优选规定,触头元件通过基座元件接地。为此,基座元件被接地或基座元件是接地的。
关于基座元件特别优选规定,开关装置具有基座元件,并且接地开关被设计为附装式接地开关。
关于按照本发明的接地开关还优选规定,主触头由触头装置的刚性的臂形成,其中,触头装置通过两个臂分叉。
根据按照本发明的接地开关的优选的实施方式,弯曲刚性的臂通过扭力弹簧接入触头装置。由此,可以预紧弯曲刚性的臂。在此,优选规定,扭力弹簧布置在刚性的臂的自由端上。
在按照本发明的具有接地开关的中压和/或高压开关装置中,接地开关为了将触头元件接地而具有可运动的开关元件和布置在开关元件的自由端上的触头装置,在该中压和/或高压开关装置中规定,接地开关是前面提到的接地开关。触头元件是接地开关的构件或中压和/或高压开关装置中的至少一个构件。
附图说明
在下文中,本发明的实施例在附图中示意性示出并且在下面更详细地描述。附图中:
图1示出了具有根据本发明的优选的第一实施方式的接地开关的中压和/或高压开关装置的一部分,
图2示出了在图1中所示的接地开关闭合时的运动过程,
图3示出了在图1中所示的接地开关断开时的运动过程,
图4示出了在具有略微改变的辅助触头的接地开关闭合时的运动过程,
图5示出了在具有略微改变的辅助触头的接地开关断开时的运动过程,
图6示出了在具有不同地略微改变的辅助触头的接地开关闭合时的运动过程,和
图7示出了在具有不同地略微改变的辅助触头的接地开关断开时的运动过程。
具体实施方式
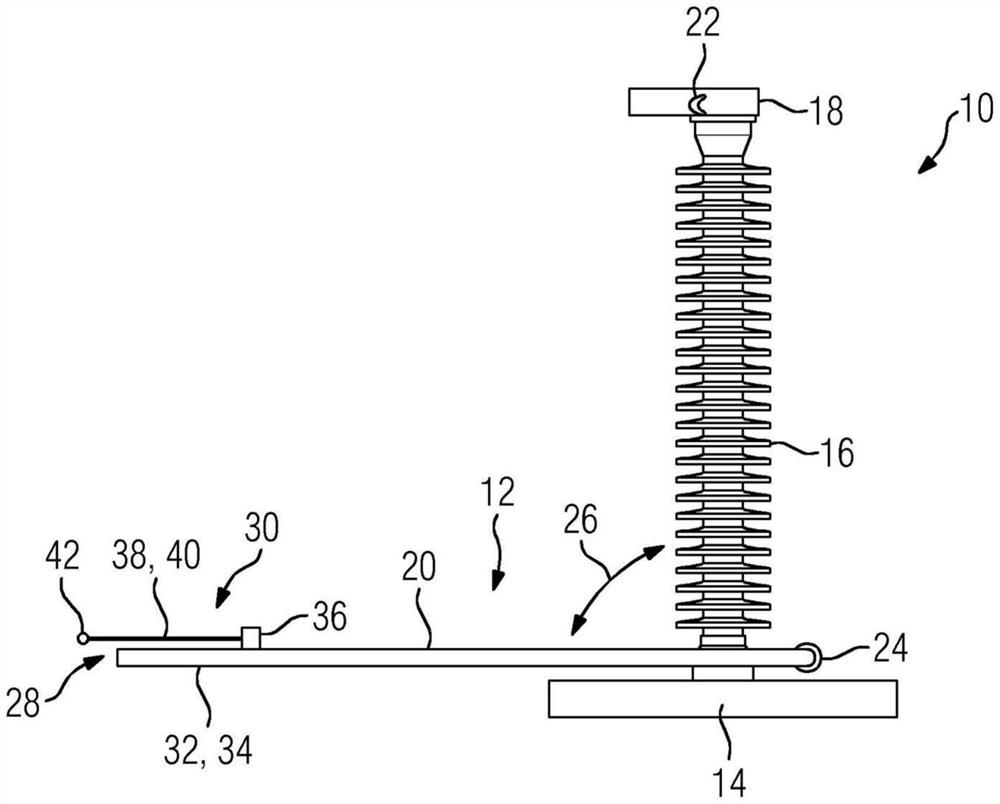
图1示出了包括用于中压和/或高压开关装置10的接地开关12的中压和/或高压开关装置10的一部分。接地开关12在此被设计为所谓的附装式接地装置,开关装置10的所示部分由设计为基板的基座元件14组成,该基座元件承载绝缘子16,在该绝缘子16上布置有触头元件18,该触头元件18通过绝缘子16与基座元件14电绝缘。
接地开关12具有用于将由触头元件18形成的配对触头接地的开关元件20。触头元件18可以被视为接地开关12的构件,但始终是接入有接地开关12的中压和/或高压开关装置10的一部分。触头元件18具有结构22,以下结合开关元件20的各个构件再次详细讨论该结构的形状和功能。
开关元件20通过支架24可运动地、更准确地说可枢转地支承在基座元件14上(双箭头26)并且在其自由端28上具有触头装置30。触头装置30本身具有刚性的臂32,该刚性的臂形成开关元件20的主触头34。在触头装置30的分叉部36处,分支出弯曲刚性的臂38,该弯曲刚性的臂形成触头装置30的辅助触头40。术语“触头”在此当然尤其涉及电气触头。因此,两个臂32、38也被称为接触臂32、38。在弯曲刚性的臂38的自由端上存在辅助触头40的球形的终端元件42。弯曲刚性的臂38优选由铝制成,触头元件18的结构22由不锈钢制成。
因此存在具有主触头32和辅助触头40的触头装置30,用于相应地电气接触触头元件18或该触头元件的相应结构18。主触头32在此接触触头元件18的基座,辅助触头40经由触头元件18的上述的结构22接触触头元件18。
为了电气接触辅助触头40,触头元件18的结构22被设计为可由弯曲刚性的臂38从后面咬合的、具有导入斜面的后抓握结构。该结构22在此尤其是钩头形的结构22。由于该形状,辅助触头40在接地开关12闭合时经由导入斜面平缓地进入后抓握结构22上的相应的后抓握位置并且在接地开关断开时突然从触头元件18上弹开或甩开。
此处所示的接地开关12是以用于任何结构类型的断路开关的所谓的附装式接地装置的结构形式的接地开关12。但其也可以被设计为独立的接地开关12。
辅助触头40具体地由铝棒(锥形,AL 7075 T6)形成,触头元件18的结构22由不锈钢钩头形成。
如所述的,不锈钢钩头是接地开关12的固定的触头元件18的组成部分,锥形铝棒是接地开关12的通过开关元件20可运动的触头装置30。锥形铝棒在自由端上具有小的由不锈钢制成的终端元件42,用于介电屏蔽和用于吸收开关电弧。
因此,辅助触头40的设计详细地具有下列特征:
-铝棒(通过分叉部36固定在开关元件20上),其具有
ο材料AL 7075T6(特定的柔韧性、弹簧特性、良好的导电性),
ο锥形形状(允许杆的整个长度上具有柔韧性),和
ο由不锈钢制成的圆形终端元件42。
用作辅助配对触头的结构22是不锈钢钩头,该不锈钢钩头是用作配对触头的触头元件18的一部分。
图2至图7现在示出了接地开关12的不同的变型和其在闭合(箭头44)和断开(箭头46)时的运动过程。
在此给出辅助触头40的下列作用方式:
在接通接地开关12(图2、图4和图6)时,辅助触头40用作相对于接地开关12的触头装置30的主触头34超前的触头。设计为具有由不锈钢制成的圆形终端元件42的铝棒的弯曲刚性的臂38在主触头系统18、34运行期间与设计为不锈钢钩头的结构22的导入斜面接触,直到臂38然后由于触头装置30的进一步运动而与结构22咬合。电流路径通过辅助触头系统22、38、42闭合,主触头系统18、32可以在没有电压的情况下接通。
在断开接地开关12(图3、图5和图7)时,辅助触头系统22、38、42仍然闭合。接地开关12的主触头系统18、32可以无电压地断开。设计为不锈钢钩头的结构22防止辅助触头40的设计为铝棒的弯曲刚性的臂38在断开时与由刚性的臂32(接地臂)形成的主触头34一起沿“断开”方向运动。弯曲刚性的臂38本身张紧(类似于鞭子),直到弯曲刚性的臂38的突出的长度穿过钩头形的结构22而终止。如果弯曲刚性的臂38离开结构22,则其会甩回其起始位置(箭头48)。辅助触头系统22、38、42的电气接触由此以非常高的速度断开。由于辅助触头系统22、38、42非常快地切换,开关电弧被避免或只是微弱的或最小的。
图2示出了在图1中所示的接地开关12闭合时的运动过程,图3示出了在图1中所示的接地开关12断开时的运动过程。
该变型下面被称为具有较短的弯曲刚性的臂38(尤其是铝棒)的辅助触头系统22、38、42。
给出下列开关顺序以及该变型的下列优点和缺点:
接通:接触辅助触头系统22、38、42→接触主触头系统18、32。
断开:断开主触头系统→预紧辅助触头系统22、38、42→快速切断。
优点:
用于切换小的电感性电流和直到额定电压等级245kV的电压的成本低廉的变型(在详细结构设计时限制或扩展)。
缺点:
在这样设计的附装式接地装置中,由于设计为铝棒的弯曲刚性的臂38的突出,可能破坏不利的接地位置的击穿距离(可能需要通过对基座元件14设计调整来避免)。
图4示出了在具有略微改变的辅助触头40的接地开关12的变型闭合时的运动过程。图5示出了已在图4中示出的接地开关12的断开时的运动过程。
该变型下面被称作辅助触头系统22、38、42,其具有较长的弯曲刚性的臂38(尤其是铝棒)。
给出下列开关顺序以及该变型的下列优点和缺点:
接通:接触辅助触头系统22、38、42→接触主触头系统18、32。
断开:断开主触头系统→预紧辅助触头系统→快速切断。
优点:
用于切换电感性电流和额定电压等级245至420kV的电压的成本低廉的变型(在详细结构设计时限制或扩展)。
缺点:
在这样设计的附装式接地装置中,由于设计为铝棒的弯曲刚性的臂38的突出可能损坏不利的接地位置的击穿距离(可能需要通过对基座元件14设计调整来避免)。
图6示出了具有略微改变的辅助触头40的接地开关12的另一个变型的闭合时的运动过程。图7示出了已在图4中示出的接地开关12断开时的运动过程。在该变型中,弯曲刚性的臂38固定在刚性的臂32的自由端上并且以其自由端指向与刚性的臂32相反的方向(“悬挂的固定”)。
该变型在下面被称作辅助触头系统22、38、42,其具有较长的弯曲刚性的臂38(尤其是铝棒)和弹簧辅助装置。
这种具有在铝棒的固定端部上的附加弹簧元件(此处为扭力弹簧50)和铝棒的悬挂的固定的变型产生特别快速的开关速度。
给出下列的开关顺序以及该变型的下列优点和缺点:
接通:接触辅助触头系统→接触主触头系统。
断开:断开主触头系统→预紧辅助触头系统→快速切断。
优点:
用于切换电感性电流和从420kV起的额定电压等级的电压的变型(在详细结构设计时限制或扩展)。取决于结构类型,在附装式接地装置中,由于设计为铝棒的弯曲刚性的臂38的突出,不损坏不利的接地位置的击穿距离。
缺点:
比不带扭力弹簧的变型更麻烦且成本更高。
通过使用辅助触头装置获得下列优点:
-接地开关在断开过程中随动(nachlaufen),并因此保护主触头(切换电容性和电感性的剩余电流)。
-可以通过铝棒的直径和长度调整随动。
-辅助触头的速度并因此切换效率也可以通过铝棒的柔韧性确定,因此可以通过铝棒的直径和长度调整。
-与传统解决方案相比,使铝和不锈钢的使用最小化并且避免使用其他特殊材料,例如钨。
-与具有大量辅助触头和弹簧支承装置的系统相比,小质量的使用可以实现棒的更快的加速(更高的切换速度)。
-在仅具有枢转运动的接地开关中并且在具有枢转-推进运动的接地开关中使用。
-尤其是,所选的铝的弹性能够实现在离开不锈钢钩头时如此高的速度,以至于不会实际上产生电弧(时间很短,以至于可以几乎无电弧地切换,“无电弧特性(no-arcfeature)”)。与之相比,传统的解决方案总是导致长期存在的(大)电弧。
附图标记列表:
10 中压和/或高压开关装置
12 接地开关
14 基座元件
16 绝缘子
18 触头元件
20 开关元件
22 钩头结构
24 支架
26 双箭头(枢转运动)
28 自由端
30 触头装置
32 刚性的臂
34 主触头
36 分叉部
38 弯曲刚性的臂
40 辅助触头
42 终端元件
44 箭头
46 箭头
48 箭头
50 扭力弹簧
- 用于中压和/或高压开关装置的接地开关和相应的开关装置
- 用于高压断路器柜的隔离开关和接地开关的联锁装置