车辆控制装置、车辆控制方法、车辆、信息处理装置、信息处理方法以及程序
文献发布时间:2023-06-19 12:02:28
技术领域
本技术涉及车辆控制装置、车辆控制方法、车辆、信息处理装置、信息处理方法以及程序,并且具体而言,涉及使得能够实现车辆的平稳停车和出库的车辆控制装置、车辆控制方法、车辆、信息处理装置、信息处理方法以及程序。
背景技术
以往,提出了如下方案,即,在用户按下远程控制钥匙按钮时,向三面被包围的停车场中的并行停车的两辆车发送指令,前方车辆一旦出库,后侧的车辆就接着出库,并且前方车辆再次停车,以便使后侧的车辆自动出库(例如,参照专利文献1)。
引文列表
专利文献
专利文献1:日本专利申请公开号2011-178264
发明内容
本发明要解决的问题
但是,专利文献1中描述的发明是以预先在远程控制钥匙中登记了与两辆车有关的车辆信息为前提。因此,专利文献1中描述的发明可以应用于例如像在家中停车时一样预先确定要停车的车辆的情况。然而,难以将专利文献1中描述的发明应用于如在公共停车场中那样没有预先确定要停车的车辆的情况。
本技术是考虑到这种情况而作出的,并且能够使车辆平稳地停车和出库。
问题的解决方案
根据本技术的第一方面的车辆控制装置包括:远程操作控制单元,其批准作为执行车辆的远程操作的权限的远程操作权;以及动作控制单元,其根据由被授予所述远程操作权的信息处理装置响应于给其他车辆的移动指令而执行的远程操作来控制所述车辆的动作。
由车辆控制装置执行的根据本技术的第一方面的车辆控制方法包括批准作为执行车辆的远程操作的权限的远程操作权,以及根据由被授予所述远程操作权的信息处理装置响应于给其他车辆的移动指令而执行的远程操作来控制所述车辆的动作。
根据本技术的第一方面的程序使计算机执行如下处理,包括批准作为执行车辆的远程操作的权限的远程操作权,以及根据由被授予所述远程操作权的信息处理装置响应于给其他车辆的移动指令而执行的远程操作来控制所述车辆的动作。
根据本技术的第二方面的车辆包括驱动单元;远程操作控制单元,其批准作为执行远程操作的权限的远程操作权;以及动作控制单元,其根据由被授予所述远程操作权的信息处理装置响应于给其他车辆的移动指令而执行的远程操作来控制所述驱动。
根据本技术的第三方面的信息处理装置包括车辆检测单元,其检测第一车辆;以及车辆控制单元,其请求作为远程地操作第一车辆的权限的远程操作权,并且在被授予所述远程操作权的情况下,响应于移动第二车辆的指令,远程地操作第一车辆。
根据本技术的第三方面的由信息处理装置执行的信息处理方法包括检测第一车辆;请求作为远程地操作第一车辆的权限的远程操作权;以及在被授予远程操作权的情况下,响应于移动第二车辆的指令来远程地操作第一车辆。
根据本技术的第三方面的程序使计算机执行如下处理,所述处理包括如下步骤:检测第一车辆;请求作为远程地操作第一车辆的权限的远程操作权;以及在被授予远程操作权的情况下,响应于移动第二车辆的指令来远程地操作第一车辆。
在本技术的第一方面中,批准作为执行车辆的远程操作的权限的远程操作权;以及根据由被授予所述远程操作权的信息处理装置响应于给其他车辆的移动指令而执行的远程操作来控制所述车辆的动作。
在本技术的第二方面中,批准作为执行远程操作的权限的远程操作权;以及根据由被授予所述远程操作权的信息处理装置响应于给其他车辆的移动指令而执行的远程操作来控制驱动单元。
在本技术的第三方面中,检测第一车辆;请求作为远程地操作第一车辆的权限的远程操作权;以及在被授予远程操作权的情况下,响应于移动第二车辆的指令来远程地操作第一车辆。
附图说明
图1是示出应用了本技术的停车控制系统的实施例的框图。
图2是示出停车场的示例性配置的图。
图3是示出车辆控制单元的示例性配置的框图。
图4是示出控制装置的示例性配置的框图。
图5是示出停车控制单元的示例性配置的框图。
图6是用于说明控制装置的处理的流程图。
图7是用于说明停车控制系统的处理的序列图。
图8是用于说明车辆的处理的流程图。
具体实施方式
在下文中,将描述用于执行本技术的模式。将按照以下顺序进行描述。
1.实施例
2.修改
3.其他
<1.实施例>
首先,将参考图1至图8描述本技术的实施例。
<停车控制系统1的示例性配置>
图1示出应用本技术的停车控制系统1的示例性配置。
停车控制系统1是控制停车场中的车辆的停车和出库的系统。
停车控制系统1包括车辆11-1至11-n、信息终端12-1至12-n、控制装置13和网络21。车辆11-1至11-n、信息终端12至12-n和控制装置13经由网络21彼此连接并彼此通信。车辆11-i(i=1至n)和信息终端12-i(i=1至n)可以不通过网络21而直接相互通信,此外,车辆11-1至11-n可以不通过网络21而直接相互通信。
注意,在下文中,在不需要将车辆11-1至11-n和信息终端12-1至12-n彼此区分的情况下,车辆11-1至11-n被简称为车辆11,并且信息终端12-1至12-n被简称为信息终端12。
此外,车辆11和信息终端12不必具有一对一的关系。例如,多个信息终端12可以与单个车辆11相关联,或者多个车辆11可以与单个信息终端12相关联。
车辆11可以自动被驾驶,并且可以从外部远程执行(远程控制)一些操作。
信息终端12例如由诸如智能手机或移动电话的移动信息终端、或者钥匙链等车辆11用的信息终端构成。信息终端12经由网络21与车辆11通信,或者直接向车辆11发出指令或从车辆11获取各种信息。此外,信息终端12经由网络21与控制装置13通信,并与控制装置13交换各种信息。
控制装置13设置在停车场中。控制装置13经由网络21与各车辆11进行通信,并且远程操作各车辆11,以便控制各车辆11在停车场中的位置。
<停车场51的示例性配置>
图2示意性地示出了设置有停车控制系统1的停车场51的示例性配置。
在停车场51中,设置有入口52和出口53。例如,在入口52处设置入口门(未示出),并且在出口53处设置出口门(未示出)。入口门和出口门的打开和关闭由控制装置13控制。
在停车场51中设置专用的下车空间54和出库等待空间55。然后,将下车空间54和出库等待空间55以外的空间用作各车辆11的停车位。
例如,在从入口52进入停车场51之后,车辆11暂时停在下车空间54中。然后,如稍后所述,控制装置13远程操作车辆11,以便在车辆11中的用户下车之后将车辆11移动到停车位置。另外,如后所述,在车辆11出库的情况下,控制装置13远程操作车辆11,以便将车辆11从停车位置移动到出库等待空间55。然后,在用户进入停在出库等待空间55中的车辆11之后,车辆11通过出口53从停车场51出来。
这里,如后所述,为了使各车辆11移动到停车位置或使车辆11从停车位置移动到出库等待空间55,控制装置13远程操作各车辆11以根据需要变换车辆11。此时,停车位的一部分被确保为变换空间56,并且用于变换车辆11。
<车辆控制系统100的示例性配置>
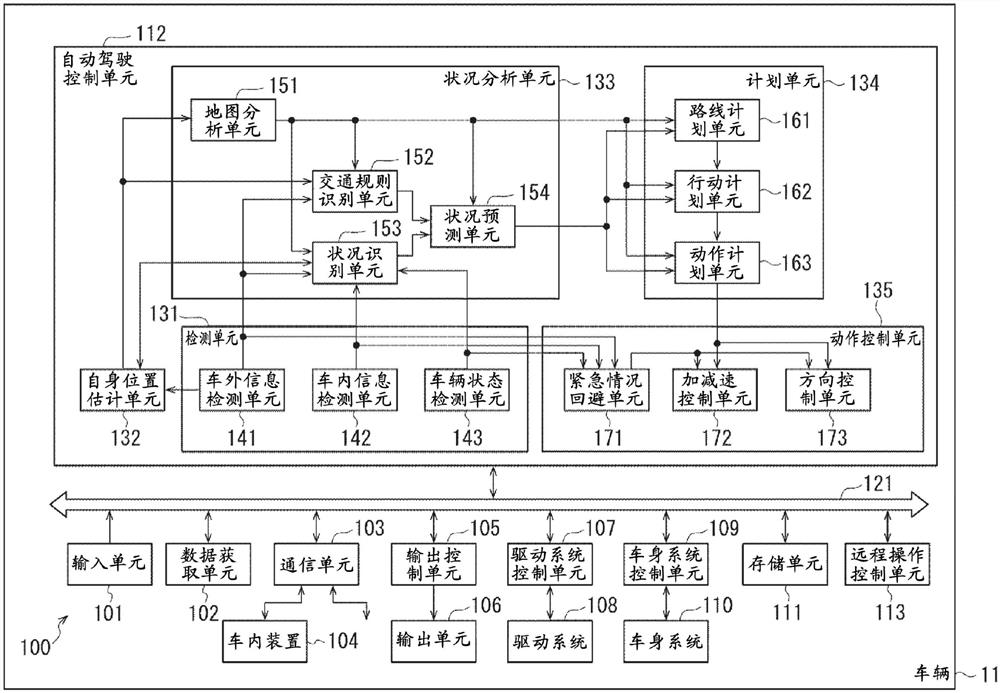
图3是示出在作为本技术可以应用的移动体控制系统的示例的每个车辆11中设置的车辆控制系统100的示意性功能的示例性配置的框图。
注意,在下文中,在每个车辆11区别于其他车辆11的情况下,每个车辆11被称为本车。
车辆控制系统100包括输入单元101、数据获取单元102、通信单元103、车载装置104、输出控制单元105、输出单元106、驱动系统控制单元107、驱动系统108、车身系统控制单元109、车身系统110、存储单元111、自动驾驶控制单元112和远程操作控制单元113。输入单元101、数据获取单元102、通信单元103、输出控制单元105、驱动系统控制单元107、车身系统控制单元109、存储单元111、自动驾驶控制单元112和远程操作控制单元113经由通信网络121相互连接。通信网络121包括例如符合可选标准的车载通信网络,例如控制器局域网(CAN)、局域互连网络(LIN)、局域网(LAN)或FlexRay(注册商标)、总线等。注意,车辆控制系统100的每个单元可以在没有通信网络121的情况下直接连接。
注意,在下文中,在车辆控制系统100的每个单元经由通信网络121执行通信的情况下,省略对通信网络121的描述。例如,在输入单元101和自动驾驶控制单元112经由通信网络121彼此通信的情况下,简单地描述输入单元101和自动驾驶控制单元112彼此通信。
输入单元101包括由乘员用来输入各种数据、指令等的装置。例如,输入单元101包括诸如触摸面板、按钮、麦克风、开关或操纵杆的操作装置以及除了手动操作之外可以使用声音、手势等的方法来执行输入的操作装置。此外,例如,输入单元101可以是诸如使用红外线和其他无线电波的远程控制装置或与车辆控制系统100的操作兼容的移动装置、可穿戴装置等的外部连接装置。输入单元101基于由乘员输入的数据、指令等产生输入信号,并将输入信号提供给车辆控制系统100的每个单元。
数据获取单元102包括获取用于车辆控制系统100的处理的数据的各种传感器等并将所获取的数据提供给车辆控制系统100的各单元。
例如,数据获取单元102包括检测本车的状态等的各种传感器。具体而言,例如,数据获取单元102包括陀螺仪传感器、加速度传感器、惯性测量装置(IMU)、检测加速踏板的操作量、制动踏板的操作量、方向盘的转向角、引擎速度、马达速度、车轮旋转速度等的传感器。
此外,例如,数据获取单元102包括检测本车外部的信息的各种传感器。具体而言,例如,数据获取单元102包括成像装置,诸如飞行时间(ToF)相机、立体相机、单目相机、红外相机或其他相机。此外,例如,数据获取单元102包括检测天气、气象现象等的环境传感器和检测本车周围的物体的周围信息检测传感器。环境传感器包括例如雨滴传感器、雾传感器、阳光传感器、雪传感器等。周围信息检测传感器包括例如超声波传感器、雷达、光检测和测距以及激光成像检测和测距(LiDAR)、声纳等。
此外,例如,数据获取单元102包括检测本车的当前位置的各种传感器。具体而言,例如,数据获取单元102包括从GNSS卫星接收GNSS信号的全球导航卫星系统(GNSS)接收器等。
此外,例如,数据获取单元102包括检测车载信息的各种传感器。具体而言,例如,数据获取单元102包括对驾驶员进行成像的成像装置、检测驾驶员的生物信息的生物传感器、收集车辆内部的声音的麦克风等。生物传感器例如设置在座椅表面、方向盘等中,并且检测坐在座椅上的乘员或握住方向盘的驾驶员的生物信息。
通信单元103与车载装置104、车辆外部的各种装置、服务器、基站等通信。通信单元103发送从车辆控制系统100的每个单元提供的数据,并将接收到的数据提供给车辆控制系统100的每个单元。注意,通信单元103所支持的通信协议没有特别限制。此外,通信单元103可以支持多种类型的通信协议。
例如,通信单元103通过使用无线LAN、蓝牙(注册商标)、近场通信(NFC)、无线USB(WUSB)等执行与车载装置104的无线通信。此外,例如,通信单元103通过使用通用串行总线(USB)、高清晰度多媒体接口(HDMI)(注册商标)、移动高清晰度链路(MHL)等经由未示出的连接端子(以及必要的线缆)与车载装置104进行有线通信。
此外,例如,通信单元103经由基站或接入点与存在于外部网络(例如,因特网、云网络或公司专用网络)上的装置(例如,应用服务器或控制服务器)通信。此外,例如,通信单元103通过使用对等(P2P)技术与本车附近的终端(例如,行人或商店的终端或机器类型通信(MTC)终端)进行通信。此外,例如,通信单元103执行V2X通信,诸如车辆与车辆间(车辆之间)通信、车辆与基础设施间(车辆和基础设施之间)通信、车辆与家间(本车与家之间)通信以及车辆与行人间(车辆和行人之间)通信。此外,例如,通信单元103包括信标接收单元,其接收从安装在道路等上的无线站发送的无线电波或电磁波,并且获取包括当前位置、拥塞、交通管制、所需时间等的信息。
车载装置104包括例如乘员的移动装置或可穿戴装置、或者携带在或附接到本车的信息装置、以及搜索到可选目的地的路线的导航装置等。
输出控制单元105控制向本车的乘员或本车外部输出各种信息。例如,输出控制单元105生成包括视觉信息(例如,图像数据)或听觉信息(例如,音频数据)中的至少一个的输出信号,并将所生成的信号提供给输出单元106,以便控制从输出单元106的视觉信息和听觉信息的输出。具体而言,例如,输出控制单元105合成由数据获取单元102的不同成像装置成像的图像数据,生成鸟瞰图像、全景图像等,并且将包括所生成的图像的输出信号提供给输出单元106。此外,例如,输出控制单元105生成包括针对诸如碰撞、接触、进入危险区域等的危险的警告声音、警告消息等的音频数据,并且将包括所生成的音频数据的输出信号提供给输出单元106。
输出单元106包括能够向本车的乘员或车辆外部输出视觉信息或听觉信息的装置。例如,输出单元106包括显示装置、仪表板、音频扬声器、耳机、诸如由乘员等佩戴的玻璃状显示器的可佩戴装置、投影仪、灯等。除了具有正常显示器的装置之外,包括在输出单元106中的显示装置可以是在驾驶员的视野中显示视觉信息的装置,例如,平视显示器、透射显示器、具有增强现实(AR)显示功能的装置等。
驱动系统控制单元107生成各种控制信号,并将所生成的信号提供给驱动系统108,以控制驱动系统108。此外,驱动系统控制单元107根据需要向除驱动系统108以外的各单元提供控制信号,并且发出驱动系统108的控制状态的通知等。
驱动系统108包括与本车的驱动系统相关的各种装置。例如,驱动系统108包括产生驱动力的驱动力产生装置(诸如内燃机、驱动马达等)、将驱动力传递到车轮的驱动力传递机构、调节转向角的转向机构、产生制动力的制动装置、防抱死制动系统(ABS)、电子稳定控制(ESC)、电子动力转向装置等。
车身系统控制单元109生成各种控制信号,并将所生成的信号提供给车身系统110,以控制车身系统110。此外,车身系统控制单元109根据需要向除了车身系统110之外的每个单元提供控制信号,并且发出车身系统110的控制状态的通知等。
车身系统110包括安装在车身上的各种车身系统装置。例如,车身系统110包括无钥匙进入系统、智能钥匙系统、电动车窗装置、电动座椅、方向盘、空调、各种灯(例如,前灯、背光、指示器、雾灯等)等。
存储单元111包括例如磁存储装置,诸如只读存储器(ROM)、随机存取存储器(RAM)或硬盘驱动器(HDD)、半导体存储装置、光存储装置、磁光存储装置等。存储单元111存储由车辆控制系统100的每个单元使用的各种程序、数据等。例如,存储单元111存储地图数据,例如,诸如动态地图的三维高精度地图、覆盖广阔区域并且具有比高精度地图低的精度的全局地图、包括本车周围的信息的局部地图等。
自动驾驶控制单元112控制诸如自主行驶或驾驶辅助的自动驾驶。具体而言,例如,自动驾驶控制单元112执行协作控制以实现高级驾驶员辅助系统(ADAS)的功能,包括本车的碰撞避免或冲击缓和、基于车辆之间的距离的跟随行驶、车速维持行驶、本车碰撞警告、本车的车道偏离警告等。此外,例如,自动驾驶控制单元112执行用于自动驾驶的协作控制,以在不依赖于驾驶员的操作的情况下自主地行驶车辆。自动驾驶控制单元112包括检测单元131、自身位置估计单元132、状况分析单元133、计划单元134和动作控制单元135。
检测单元131检测控制自动驾驶所需的各种信息。检测单元131包括车外信息检测单元141、车内信息检测单元142以及车辆状态检测单元143。
车外信息检测单元141基于来自车辆控制系统100的各单元的数据或信号,执行用于检测本车外的信息的处理。例如,车外信息检测单元141对本车周围的物体执行检测处理、识别处理、追踪处理、以及检测与物体之间的距离的处理。作为检测对象的物体例如包括车辆、人、障碍物、构造物、道路、信号灯、交通标识、道路标识等。此外,例如,车外信息检测单元141执行用于检测本车周围的环境的处理。作为检测对象的周围环境例如包括天气、温度、湿度、亮度、路面状况等。车外信息检测单元141将表示检测处理结果的数据提供给状况分析单元133的自身位置估计单元132、地图分析单元151、交通规则识别单元152、状况识别单元153、以及动作控制单元135的紧急情况回避单元171等。
车内信息检测单元142基于来自车辆控制系统100的各单元的数据或信号,执行检测车内信息的处理。例如,车内信息检测单元142执行用于认证和识别驾驶员的处理、用于检测驾驶员的状态的处理、用于检测乘员的处理、用于检测车内环境的处理等。作为检测对象的驾驶员的状态,例如包括身体状态、觉醒度、集中度、疲劳度、视线方向等。作为检测对象的车载环境,例如包括温度、湿度、亮度、气味等。车内信息检测单元142将表示检测处理结果的数据提供给状况分析单元133的状况识别单元153、动作控制单元135的紧急情况回避单元171等。
车辆状态检测单元143基于来自车辆控制系统100的各单元的数据或信号,执行用于检测本车状态的处理。作为检测对象的本车状态,例如包括速度、加速度、转向角、是否发生异常、异常的内容、驾驶操作状态、电动座椅的位置和倾斜、门锁状态、其他车载装置的状态等。车辆状态检测单元143将表示检测处理结果的数据提供给状况分析单元133的状况识别单元153、动作控制单元135的紧急情况回避单元171等。
自身位置估计单元132基于来自车辆控制系统100的诸如车外信息检测单元141、状况分析单元133的状况识别单元153等各单元的数据或信号,执行估计本车的位置、姿势等的处理。此外,自身位置估计单元132根据需要生成用于估计自身位置的局部地图(在下文中,称为自身位置估计地图)。例如,自身位置估计地图是使用诸如同时定位和地图绘制(SLAM)的技术的具有高精度的地图。自身位置估计单元132将表示估计处理的结果的数据提供给状况分析单元133的地图分析单元151、交通规则识别单元152、状况识别单元153等。此外,自身位置估计单元132使存储单元111存储自身位置估计图。
状况分析单元133执行用于分析本车以及周围的状况的处理。状况分析单元133包括地图分析单元151、交通规则识别单元152、状况识别单元153和状况预测单元154。
地图分析单元151根据需要使用来自车辆控制系统100的诸如自身位置估计单元132、车外信息检测单元141等的各单元的数据或信号,执行对存储单元111中存储的各种地图进行分析的处理,并构建包括自动驾驶处理所需的信息的地图。地图分析单元151将所构建的地图提供给交通规则识别单元152、状况识别单元153、状况预测单元154、计划单元134的路线计划单元161、行动计划单元162、动作计划单元163等。
交通规则识别单元152基于来自车辆控制系统100的诸如自身位置估计单元132、车外信息检测单元141或地图分析单元151的各单元的数据或信号,执行用于识别本车周围的交通规则的处理。根据该识别处理,例如,识别本车周围的交通灯的位置和状态、本车周围的交通管制的内容、本车能够行驶的车道等。交通规则识别单元152将指示识别处理的结果的数据提供给状况预测单元154等。
状况识别单元153基于来自车辆控制系统100的诸如自身位置估计单元132、车外信息检测单元141、车内信息检测单元142、车辆状态检测单元143或地图分析单元151的各单元的数据或信号,执行识别本车的状况的处理。例如,状况识别单元153执行用于识别本车的状况、本车周围的状况、本车的驾驶员的状况等的处理。此外,状况识别单元153根据需要生成用于识别本车周围的状况的局部地图(下文中,称为状况识别地图)。状况识别图是例如占用网格图(Occupancy Grid Map)。
作为识别对象的本车的状况,例如包括本车的位置、姿势、移动(例如速度、加速度、移动方向等)、是否发生异常、内容等。作为识别对象的本车周围的状况,例如包括本车周围的静止物的种类和位置、本车周围的移动体的种类、位置和移动(例如,速度、加速度、移动方向等)、本车周围的道路的形状、路面的状态、本车周围的天气、温度、湿度、亮度等。作为检测对象的驾驶员的状态,例如包括身体状况、觉醒度、集中度、疲劳度、视线移动、驾驶操作等。
状况识别单元153将指示识别处理的结果的数据(必要时包括状况识别图)提供给自身位置估计单元132、状况预测单元154等。此外,状况识别单元153使存储单元111存储状况识别图。
状况预测单元154基于来自车辆控制系统100的诸如地图分析单元151、交通规则识别单元152、状况识别单元153等的各单元的数据或信号,执行用于预测本车的状况的处理。例如,状况预测单元154执行用于预测本车的状况、本车周围的状况、驾驶员的状况等的处理。
作为预测对象的本车的状况,例如包括本车的行为、异常的发生、可行驶距离等。作为预测对象的车辆周围的状况,例如包括本车周围的移动体的行为、信号灯的状态变化、诸如天气的环境变化等。作为预测对象的驾驶员的状况,例如包括驾驶员的行为、身体状况等。
状况预测单元154将表示预测处理结果的数据与来自交通规则识别单元152和状况识别单元153的数据一起提供给计划单元134的路线计划单元161、行动计划单元162、动作计划单元163等。
路线计划单元161基于来自车辆控制系统100的诸如地图分析单元151、状况预测单元154的每个单元的数据或信号来计划到目的地的路线。例如,路线计划单元161基于全球地图,设定从当前位置到指定目的地的路线。此外,例如,路线计划单元161基于诸如拥堵、事故、交通管制、施工等状况或驾驶员的身体状况等,适当地变更路线。路线计划单元161将表示所计划的路线的数据提供给行动计划单元162等。
行动计划单元162基于来自车辆控制系统100的诸如地图分析单元151或状况预测单元154的各单元的数据或信号,计划本车在计划时间内安全地行驶由路线计划单元161计划的路线的行动。例如,行动计划单元162进行诸如起步、停止、行进方向(例如,前进、后退、左转、右转、转弯等)、行进车道、行进速度、超车等的计划。行动计划单元162将表示所计划的本车的行动的数据提供给动作计划单元163等。
动作计划单元163基于来自车辆控制系统100的诸如地图分析单元151或状况预测单元154的各单元的数据或信号,计划本车的实现由行动计划单元162计划的行动。例如,动作计划单元163计划加速度、减速度、行进轨迹等。动作计划单元163将表示本车的计划动作的数据提供给动作控制单元135的加减速控制单元172或方向控制单元173等。
动作控制单元135控制本车的动作。动作控制单元135包括紧急情况回避单元171、加减速控制单元172和方向控制单元173。
紧急情况回避单元171基于车外信息检测单元141、车内信息检测单元142以及车辆状态检测单元143的检测结果,执行用于检测诸如碰撞、接触、进入危险区域、驾驶员的异常、车辆的异常等的紧急情况的处理。在检测到紧急情况的发生的情况下,紧急情况回避单元171计划本车的动作,以回避诸如急停、急转弯等的紧急情况。紧急情况回避单元171将表示本车的计划动作的数据提供给加减速控制单元172或方向控制单元173等。
加减速控制单元172控制加减速,以实现由动作计划单元163或紧急情况回避单元171计划的本车的动作。例如,加减速控制单元172计算用于实现计划的加减速或急停而对驱动力产生装置或制动装置的控制目标值,并将表示计算出的控制目标值的控制指令提供给驱动系统控制单元107。
方向控制单元173控制实现由动作计划单元163或紧急情况回避单元171计划的本车的动作的方向。例如,方向控制单元173计算实现由动作计划单元163或紧急情况回避单元171计划的行驶轨迹或急转弯而对转向机构的控制目标值,并将表示计算出的控制目标值的控制指令提供给驱动系统控制单元107。
远程操作控制单元113控制车辆11的远程操作。例如,远程操作控制单元113经由通信单元103与外部(例如,控制装置13)进行通信,并且批准作为在预定范围内远程操作车辆11的权限的远程操作权。此外,在从被授予远程操作权的一方(被允许执行远程操作的一方)接收到用于执行远程操作的信号(在下文中,被称为远程操作信号)的情况下,远程操作控制单元113响应于接收到的远程操作信号批准远程操作。在允许远程操作的情况下,远程操作控制单元113将远程操作信号提供给车辆控制系统100的每个单元。
<控制装置13的示例性配置>
图4是示出控制装置13的示例性配置的框图,更具体而言,示出在控制装置13由计算机(信息处理装置)配置的情况下的示例性配置。
在控制装置13中,中央处理单元(CPU)201、只读存储器(ROM)202和随机存取存储器(RAM)203经由总线204彼此连接。
另外,输入/输出接口205连接到总线204。输入单元206、传感器单元207、输出单元208、存储单元209、通信单元210和驱动器211连接到输入/输出接口205。
输入单元206包括诸如键盘、鼠标、麦克风等的输入装置。
传感器单元207包括检测停车场51中或周围的每个车辆11的位置和移动的传感器,例如,成像装置、超声波传感器、雷达、LiDAR、声纳等。
输出单元208包括诸如显示器或扬声器的输出装置。
存储单元209包括硬盘、非易失性存储器等。
通信单元210包括网络接口等。
驱动器211驱动诸如磁盘、光盘、光磁盘或半导体存储器的可移除介质212。
注意,在下文中,在控制装置13的每个单元经由总线204和输入/输出接口205执行通信的情况下,省略对总线204和输入/输出接口205的描述。例如,在CPU 201和通信单元210经由总线204和输入/输出接口205彼此通信的情况下,简单地描述CPU 201和通信单元210彼此通信。
<停车控制单元251的示例性配置>
图5是示出通过由控制装置13的CPU 201执行预定控制程序而实现的停车控制单元251的功能的示例性配置的框图。
停车控制单元251控制停车场51内的各车辆11的位置。停车控制单元251包括车辆检测单元261、计划单元262、车辆控制单元263以及门控制单元264。
车辆检测单元261基于从传感器单元207或经由通信单元210和网络21提供的传感器数据,与各车辆11进行通信,以便检测停车场51内或周围的车辆11的位置和移动。车辆检测单元261将表示车辆11的位置和移动的检测结果的数据提供给计划单元262、车辆控制单元263和门控制单元264。
计划单元262基于从车辆控制单元263提供的每个车辆11的出库调度信息,创建停车场51中的每个车辆11的出库计划。出库调度信息例如包括各车辆11的出库调度时间。此外,计划单元262基于车辆检测单元261对车辆11的检测结果和出库计划来创建停车场51中各车辆11的位置和移动的计划。计划单元262将表示各车辆11的位置和移动的计划的信息提供给车辆控制单元263。
车辆控制单元263经由通信单元210和网络21与车辆11进行通信,并且与车辆11进行各种数据等的交换。例如,车辆控制单元263获取或归还车辆11的远程操作权,并且对远程操作权被赋予车辆控制单元263的车辆11进行远程操作。车辆控制单元263从车辆11获取出库调度信息,并将所获取的信息提供给计划单元262。车辆控制单元263向车辆11通知下车空间54的位置,或者从车辆11接收表示用户下车的通知。
另外,车辆控制单元263判断是否允许车辆11的停车或出库,并且在许可车辆11的停车或出库的情况下,将该许可通知给门控制单元264。
门控制单元264控制在停车场51的入口52处的入口门和在出口53处的出口门。
<停车控制系统1的处理>
接下来,将参考图6至图8描述停车控制系统1的处理。
<控制装置13的处理>
首先,将参考图6中的流程图和图7中的序列图描述控制装置13的处理。
在步骤S1中,车辆检测单元261判断是否存在新停车的车辆11。
每辆车11在入口52前面例如在进入停车场51之前停止一次。
另一方面,在基于来自传感器单元207的传感器数据或者通过经由通信单元210和网络21与车辆11通信而检测到停在停车场51的入口52前面的车辆11的情况下,车辆检测单元261确定存在新停车的车辆11(在下文中,称为要新停车的车辆),并且过程进行到步骤S2。
在步骤S2中,车辆控制单元263请求远程操作权。具体而言,车辆检测单元261将检测到新停车的车辆的情况通知给车辆控制单元263。车辆控制单元263产生用于请求远程操作权的远程操作权请求信号,并经由通信单元210和网络21将所产生的信号发送到将新停车的车辆。
响应于此,在后述的图8的步骤S51中,新停车的车辆接收远程操作权请求信号。
在步骤S3中,车辆控制单元263判定是否被授予远程操作权。
具体而言,在后述的图8的步骤S52中判定为被授予远程操作权的情况下,在步骤S53中,新停车的车辆发送远程操作权授予信号。
远程操作权授予信号包括控制装置13对新停车的车辆进行远程操作所需的远程操作信息。例如,远程操作信息包括新停车的车辆的车辆信息、远程操作所需的密码、能够远程操作的车辆11的操作范围的信息。此外,例如,远程操作权授予信号可以包括出库调度信息,该出库调度信息包括新停车的车辆从停车场51出库的调度时间。
另一方面,在经由网络21和通信单元210从新停车的车辆接收到远程操作权授予信号的情况下,车辆控制单元263确定被授予远程操作权,并且过程进行到步骤S4。
注意,根据远程操作权的授予而许可远程操作的操作被限制在使新停车的车辆在停车场51内移动所需的范围内。例如,许可加速、减速、制动、行进方向(转向角)等的远程操作。另一方面,不许可与新停车的车辆的移动无关的操作的远程操作,诸如关闭/打开车门、空调或访问个人信息。
此外,能够远程操作的操作根据需要受到限制。例如,新停车的车辆的速度、移动距离、移动范围(例如,在停车场51中)等受到限制。
此外,例如,执行远程操作的地点或时间中的至少一个是有限的。例如,能够进行远程操作的地点被限制在停车场51内,或者能够进行远程操作的时间被限制为在要新停车的车辆的出库调度时间之前的时间。
由此,能够在通过远程操作使新停车的车辆移动的同时,防止被盗、车辆闯入、个人信息的泄露、能耗的浪费等。
在步骤S4中,控制装置13通知下车地点。具体而言,车辆控制单元263生成包括下车空间54的位置的下车地点通知信号,并经由通信单元210和网络21将所生成的信号发送给新停车的车辆。
此外,车辆控制单元263向门控单元264通知车辆控制单元263许可新停车的车辆停车。门控制单元264通过打开停车场51的入口52的入口门来允许要新停车的车辆进入停车场51。
另一方面,在后述的图8的步骤S54中,新停车的车辆接收下车地点通知信号。
在步骤S5中,车辆控制单元263判定用户是否已从车辆下车。重复执行步骤S5中的确定处理,直到确定用户已经从车辆下车。
例如,在将新停车的车辆移动到下车空间54之后,新停车的车辆的用户从新停车的车辆下车。在检测到用户已经从车辆下车的情况下,在稍后描述的图8中的步骤S56中,要新停车的车辆向控制装置13发送用于通知用户已经从车辆下车的下车通知信号。
响应于此,在经由网络21和通信单元210从新停车的车辆接收到下车通知信号的情况下,车辆控制单元263确定用户已经从车辆下车,过程进行到步骤S6。
在步骤S6中,控制装置13计划各车辆11的移动。
具体而言,车辆控制单元263对计划单元262指示创建用于使新停车的车辆停车的计划。
计划单元262从车辆检测单元261获取指示停车场51中的每个车辆11的位置的信息。例如,计划单元262基于停车场51内的各车辆11的位置、各车辆11的出库调度时间等,计划包括新停车的车辆的停车场51内的各车辆11的布置。
另外,计划单元262根据需要使新停车的车辆移动到计划停车位置,并计划各车辆11的移动,以实现计划的布置。另外,例如,计划单元262根据需要计划各车辆11的移动路线、移动顺序等。
计划单元262将表示所创建的计划的信息提供给车辆控制单元263。
在步骤S7中,车辆控制单元263移动各车辆11。具体而言,车辆控制单元263根据计划单元262创建的计划经由通信单元210和网络21将远程操作信号发送到要被远程操作的车辆11。
例如,在由计划单元262计划各车辆11的移动的情况下,车辆控制单元263向各车辆11发送包括各车辆11的移动路线和停车位置的远程操作信号。此外,车辆控制单元263根据各车辆11的移动顺序等控制向各车辆11发送远程操作信号的定时。由此,根据计划的移动顺序和移动路线,远程操作各车辆11,使其移动到计划的停车位置。
另外,例如,在由计划单元262仅计划各车辆11的布置的情况下,车辆控制单元263向各车辆11发送包括各车辆11的停车位置的远程操作信号。响应于此,在相互通信且相互协作的同时,远程操作车辆11,使其自主地移动到计划的停车位置。
由此,将新停车的车辆停在计划的停车位置,并根据需要变更其他车辆11的布置。
此后,过程进行到步骤S8。
另一方面,在步骤S3中,车辆控制单元263未从新停车的车辆接收到远程操作权授予信号的情况下,车辆控制单元263确定未被授予远程操作权,跳过步骤S4至S7的处理,并且过程进入步骤S8。在这种情况下,不许可将新停车的车辆停在停车场51中。
此外,在步骤S1中确定不存在新停车的车辆11的情况下,跳过步骤S2至S7中的处理,并且过程前进至步骤S8。
在步骤S8中,车辆控制单元263判定是否被通知了出库计划。具体而言,在如后所述的图8的步骤S60中,在经由网络21和通信单元210接收到从车辆11发送的出库计划通知信号的情况下,车辆控制单元263确定被通知了出库计划,并且过程进入步骤S9。注意,出库调度通知信号包括出库调度信息,该出库调度信息包括车辆11的出库调度时间。
另外,在步骤S3的处理中从新停车的车辆接收到的远程操作权信息中包括出库调度信息的情况下,车辆控制单元263确定被通知了出库调度,并且过程进入步骤S9。
在步骤S9中,计划单元262更新出库计划。具体而言,车辆控制单元263将新接收到的出库调度信息提供给计划单元262。计划单元262基于所获取的出库调度信息来更新包括停车场51中的各车辆11的出库调度时间的出库计划。
此后,过程进行到步骤S10。
另一方面,在步骤S8中确定未被通知出库调度的情况下,跳过步骤S9中的处理,并且过程进行到步骤S10。
在步骤S10中,计划单元262确定是否存在应出库的车辆11。具体而言,在基于出库计划存在出库调度时间在从当前时间起的预定时间段内(例如,在三分钟内)的车辆11的情况下,计划单元262确定存在要出库的车辆11,并且过程进行到步骤S11。
在步骤S11中,控制装置13计划各车辆11的移动。
具体而言,车辆控制单元263对计划单元262发出指令,以创建使应出库的车辆11(以下,称为出库车辆)移动到出库等待空间55的计划。
计划单元262从车辆检测单元261获取指示停车场51中的每个车辆11的位置的信息。例如,计划单元262基于停车场51中的各车辆11的位置和各车辆11的出库调度时间等,计划出库车辆出库后的停车场51中的各车辆11的布置。
另外,计划单元262根据需要计划各车辆11的移动,使出库车辆移动到出库等待空间55,并实现计划的布置。另外,例如,计划单元262根据需要计划各车辆11的移动路线、移动顺序等。
计划单元262将表示所创建的计划的信息提供给车辆控制单元263。
在步骤S12中,与步骤S6中的处理类似,根据所创建的计划移动每个车辆11。由此,根据响应于移动出库车辆的指令(出库调度信息)的远程操作将出库车辆移动到作为预定的出库位置的出库等待空间55,并且根据需要,通过远程操作变更其他车辆11的布置。
在步骤S13中,车辆控制单元263归还要出库的车辆11的远程操作权。例如,车辆控制单元263生成用于归还远程操作权的远程操作权归还信号,并经由通信单元210和网络21将所生成的信号发送给出库车辆。
响应于此,出库车辆在如稍后描述的图8中的步骤S61中接收远程操作权归还信号。
此外,车辆控制单元263废弃出库车辆的远程操作信息。
另外,例如,车辆控制单元263在确认支付停车费后,向门控制单元264通知许可出库车辆出库。门控制单元264通过打开停车场51的出口53的门来许可出库车辆出库。
此后,过程返回到步骤S1,并且执行步骤S1中和之后的处理。
另一方面,在步骤S10中确定没有出库车辆的情况下,过程返回到步骤S1,并且执行步骤S1以后的处理。
<各车辆11的处理>
接下来,将参考图8中的流程图和图7中的序列图描述由每个车辆11执行的与图6中的控制装置13的处理对应的处理。
例如,当车辆11在入口52前面停止一次以便进入停车场51时,开始该处理。
在步骤S51中,远程操作控制单元113接收对远程操作权的请求。也就是说,远程操作控制单元113经由网络21和通信单元103接收在图6的步骤S2中从控制装置13发送的远程操作权请求信号。
在步骤S52中,远程操作控制单元113确定是否授予远程操作权。例如,远程操作控制单元113指示输出控制单元105显示远程操作权批准画面。输出单元106在输出控制单元105的控制下显示远程操作权批准画面。
对此,车辆11的用户(例如驾驶员)通过输入单元101选择是否批准远程操作权的授予。输入单元101将表示用户的选择结果的数据提供给远程操作控制单元113。
在用户许可授予远程操作权的情况下,远程操作控制单元113确定授予远程操作权,并且过程进行到步骤S53。
在步骤S53中,远程操作控制单元113授予远程操作权。具体而言,远程操作控制单元113生成远程操作权授予信号。此时,例如,在用户通过输入单元101输入出库调度时间的情况下,远程操作控制单元113使包括出库调度时间的出库调度信息包括在远程操作权授予信号中。远程操作控制单元113经由通信单元103和网络21向控制装置13发送远程操作权授予信号。
在步骤S54中,远程操作控制单元113接收关于下车地点的通知。具体而言,远程操作控制单元113经由网络21和通信单元103接收在图6的步骤S4中从控制装置13发送的下车地点通知信号。远程操作控制单元113指示输出控制单元105通知下车空间54的位置。例如,输出单元106在输出控制单元105的控制下输出表示下车空间54的位置的图像或声音。
然后,例如,新停车的车辆的用户将新停车的车辆移动到下车空间54。
在步骤S55中,状况识别单元153基于从车内信息检测单元142提供的指示用于检测车辆11中的信息的处理的结果的数据,确定用户是否已经下车。重复该确定处理,直到确定车辆11中的所有用户已经下车,并且在确定车辆11中的所有用户已经下车的情况下,该过程进行到步骤S56。
在步骤S56中,状况识别单元153通知用户已经下车。具体而言,状况识别单元153生成用于通知用户已经下车的下车通知信号,并经由通信单元103和网络21将所生成的信号发送到控制装置13。
在步骤S57中,远程操作控制单元113确定是否接收到控制装置13的指令。在图6的步骤S7或步骤S12中经由网络21和通信单元103接收到从控制装置13发送的远程操作信号的情况下,远程操作控制单元113确定接收到控制装置13的指令,并且过程进行到步骤S58。
在步骤S58中,车辆11执行与控制装置13的指令对应的处理。
在由远程操作信号指示的操作在许可范围内的情况下,远程操作控制单元113将远程操作信号提供给路线计划单元161。
例如,在远程操作信号中包括移动路线的情况下,路线计划单元161将表示远程操作信号中包括的移动路线的数据提供给行动计划单元162。
另一方面,例如,在移动路线不包括在远程操作信号中的情况下,路线计划单元161经由通信单元103和网络21与停车场51内的其他车辆11进行通信,并与其他车辆11协作计划到指定的移动目的地的移动路线。路线计划单元161将表示所计划的移动路线的数据提供给行动计划单元162等。
行动计划单元162计划车辆11移动通过从路线计划单元161通知的移动路线的行动。行动计划单元162将表示所计划的车辆11的行动的数据提供给动作计划单元163等。
动作计划单元163计划车辆11的动作,以实现由行动计划单元162计划的行动。例如,动作计划单元163计划加速度、减速度、行进轨迹等。动作计划单元163将表示车辆11的计划动作的数据提供给动作控制单元135等。
动作控制单元135经由驱动系统控制单元107控制驱动系统108,控制车辆11的动作(例如加减速控制、方向控制等),以实现由动作计划单元163计划的车辆11的动作。
由此,车辆11根据通过控制装置13的远程操作而进行动作,并且向所指示的位置(例如,停车位置或出库等待空间55)移动。例如,车辆11根据控制装置13的远程操作从下车空间54移动到停车位置。此外,例如,车辆11根据响应于控制装置13的远程操作而执行的远程操作移动到其他停车位置,以将其他车辆从下车空间54移动到停车位置。另外,例如,车辆11根据响应于来自控制装置13的向其他车辆的向出库等待空间55移动的指令(出库调度信息),而进行使其他车辆向出库等待空间55移动的远程操作,从而向其他停车位置移动。此外,例如,车辆11根据响应于控制装置13对本车的移动到出库等待空间55的指令(出库调度信息)而执行的远程操作移动到出库等待空间55。
注意,例如,在由远程操作信号指示的操作在许可范围之外的情况下,远程操作控制单元113忽略远程操作信号。这防止车辆11根据远程操作执行许可范围之外的操作。
此后,过程进行到步骤S59。
另一方面,在步骤S57中确定没有接收到控制装置13的指令的情况下,跳过步骤S58中的处理,并且过程进行到步骤S59。
在步骤S59中,远程操作控制单元113确定是否接收到出库指令。
例如,在用户输入车辆11的出库指令的情况下,信息终端12生成包括出库调度时间的出库指令信号。出库调度时间基本上由用户设定。但是,例如,在用户指示立即使车辆出库的情况下,信息终端12将当前时间或当前时间之后的预定时间(例如,三分钟后)设置为出库调度时间。此外,例如,在用户指示在预定时间之后使车辆出库的情况下,信息终端12将当前时间之后的预定时间设置为出库调度时间。信息终端12经由网络21或直接将出库指令信号发送至车辆11。
在经由网络21和通信单元103接收到从信息终端12发送的出库指令信号的情况下,远程操作控制单元113确定接收到使车辆出库的指令,并且过程进行到步骤S60。
在步骤S60中,车辆11将出库调度通知信号发送到控制装置13。具体而言,远程操作控制单元113基于出库指令信号产生包括车辆11的出库调度时间的出库调度通知信号,并经由通信单元103和网络21将所产生的信号发送到控制装置13。
此后,过程进行到步骤S61。
另一方面,在步骤S59中确定没有接收到使车辆出库的指令的情况下,跳过步骤S60中的处理,并且过程进行到步骤S61。
在步骤S61中,远程操作控制单元113确定是否归还远程操作权。在确定没有归还远程操作权的情况下,过程返回到步骤S57。
然后,直到在步骤S61中确定远程操作权被归还之前,重复执行步骤S57和S61的处理。
另一方面,在步骤S61中,在经由网络21和通信单元103接收到在图6的步骤S13中由控制装置13发送的远程操作权归还信号的情况下,远程操作控制单元113确定远程操作权被归还,并且过程进行到步骤S62。
在步骤S62中,远程操作控制单元113禁用控制装置13的远程操作。此后,远程操作控制单元113禁止控制装置13的远程操作,并且即使当远程操作控制单元113从控制装置13接收到远程操作信号时,远程操作控制单元113也不响应。
此后,车辆11的处理完成。
另一方面,在步骤S52中,在用户不许可授予远程操作权的情况下,远程操作控制单元113确定不授予远程操作权,并且车辆11的处理完成。
如上所述,在停车场51中,能够平稳地进行各车辆11的停车和出库。
此外,能够有效地利用停车场51中的停车空间,并且能够增加能够停车的车辆的数量。这提高了停车场51的收益性。
此外,用户在停车时,仅使车辆11停在下车空间54,并且在出库时,仅使移动到出库等待空间55的车辆11搭乘即可。结果,用户不再需要复杂的工作,诸如搜索空余空间、进入停车位置、从停车位置出库、搜索车辆11停车的位置等。
<2.修改>
下面将描述上述本技术的实施例的修改。
控制装置13请求并归还远程操作权的定时可以改变。例如,控制装置13可以在车辆11刚进入停车场51之后请求远程操作,或者在车辆11刚离开停车场51之后归还远程操作。
另外,例如,在停车场51中,设置远程操作权的授予不被许可的车辆11专用的停车位。然后,在远程操作权的授予不被许可的情况下,例如与以往的停车场同样,用户只要自己将车辆11停在专用的停车位中或者使车辆11从该停车位出库即可。
另外,在以上的说明中,说明了车辆11向控制装置13发送出库调度通知信号的示例。但是,例如,与车辆11相关联的信息终端12向控制装置13发送与车辆11有关的出库调度通知信号。
此外,例如,信息终端12可以将出库调度通知信号发送到相关联的车辆11。响应于此,例如,车辆11可以创建行动计划并将所创建的行动计划发送到控制装置13。控制装置13可以远程操作其他车辆11,使得车辆11可以基于所接收的车辆11的行动计划根据行动计划来操作。
此外,本技术可以应用于例如在诸如仓库或建筑物的预定区域而不是普通停车场中停放多个车辆的情况。
此外,本技术可以应用于的车辆的类型不受特别限制。例如,本技术可以应用于除了汽车、卡车和公共汽车之外的诸如摩托车、自行车、个人移动装置、建筑机械、农业机械(拖拉机)等的车辆停在预定区域中的情况。
此外,本技术可以应用于除了车辆之外的移动体(诸如船舶或飞机)停在预定区域中的情况。
<3.其他>
<软件等的提供方法>
上述一系列处理可以由硬件或软件执行。在通过软件执行一系列处理的情况下,软件中所包括的程序被安装在车辆11和控制装置13中。
例如,在控制装置13中,CPU 201经由输入/输出接口205和总线204将存储在存储单元209中的程序加载到RAM 203,并执行该程序,使得执行该系列处理。
例如,可以通过将由控制装置13(CPU 201)执行的程序记录到作为封装介质的可移除介质212等来提供该程序。此外,可以经由诸如局域网、因特网和数字卫星广播的有线或无线传输介质来提供程序。
在控制装置13中,通过在驱动器211中安装可移除介质212,可以经由输入/输出接口205将程序安装到存储单元209。此外,程序可以经由有线或无线传输介质由通信单元210接收,并被安装到存储单元209。另外,程序可以预先安装到ROM 202和存储单元209。
注意,由车辆11和控制装置13执行的程序可以是以时间序列方式执行处理的程序,或者是并行地或在必要的时刻,例如当进行呼叫时执行处理的程序。
此外,系统在此意味着多个部件(装置、模块(构件)等)的组件,并且不考虑所有部件是否在同一壳体中。因此,分别容纳在彼此不同的外壳中并经由网络连接的多个装置和具有容纳在一个外壳中的多个模块的单个装置都是系统。
此外,本技术的实施例不限于上述实施例,并且在不脱离本技术的范围的情况下可以进行各种改变。
例如,本技术可以具有云计算的配置,其中,由多个装置经由网络协作地单独执行单个功能。
此外,参照上述流程图描述的每个步骤可以由单个装置执行,并且可以由多个装置划分和执行。
此外,在一个步骤中包括多种处理的情况下,一个步骤中包括的多种处理可以由单个装置执行,或者可以由多个装置划分并执行。
<配置的组合示例>
本技术可以具有以下配置。
(1)一种车辆控制装置,包括:
远程操作控制单元,被配置为批准作为执行车辆的远程操作的权限的远程操作权;以及
动作控制单元,被配置为根据由被授予所述远程操作权的信息处理装置响应于给其他车辆的移动指令而执行的远程操作来控制所述车辆的动作。
(2)根据(1)所述的车辆控制装置,其中,
所述信息处理装置从所述其他车辆或与所述其他车辆相关联的信息终端接收移动指令,以及
所述动作控制单元根据由所述信息处理装置响应于移动指令与所述其他车辆的远程操作一起执行的远程操作来控制车辆的动作。
(3)根据(1)所述的车辆控制装置,其中,
所述其他车辆从与所述其他车辆相关联的信息终端接收所述移动指令,并且创建与所述移动指令相对应的行动计划,以及
所述动作控制单元根据由信息处理装置根据所述行动计划执行的远程操作来控制车辆的动作。
(4)根据(1)至(3)中任一项所述的车辆控制装置,其中,
所述远程操作控制单元允许在停车场中对车辆的远程操作,以及
所述动作控制单元根据在停车场中由所述信息处理装置的远程操作来控制车辆的动作。
(5)根据(4)所述的车辆控制装置,其中,
所述动作控制单元根据由所述信息处理装置指定的移动路线将车辆移动到停车场中的指定位置。
(6)根据(4)所述的车辆控制装置,还包括:
计划单元,被配置为计划与所述停车场中的其他车辆协作,到由所述信息处理装置指定的位置的行动,其中
所述动作控制单元根据由计划单元计划的行动将车辆移动到所指定的位置。
(7)根据(1)至(6)中任一项所述的车辆控制装置,其中,
所述远程操作控制单元限制车辆的速度、车辆的移动距离、车辆的移动范围、能够执行车辆的远程操作的地点以及能够执行车辆的远程操作的时间中的至少一个。
(8)根据(1)至(7)中任一项所述的车辆控制装置,其中,
所述远程操作控制单元不允许对车门的远程操作以及对车辆中的个人信息的访问。
(9)一种车辆控制方法,包括:
由车辆控制装置执行
批准作为执行车辆的远程操作的权限的远程操作权;以及
根据由被授予所述远程操作权的信息处理装置响应于给其他车辆的移动指令而执行的远程操作来控制所述车辆的动作。
(10)一种用于使计算机执行处理的程序,所述处理包括:
批准作为执行车辆的远程操作的权限的远程操作权;以及
根据由被授予所述远程操作权的信息处理装置响应于给其他车辆的移动指令而执行的远程操作来控制所述车辆的动作。
(11)一种车辆,包括:
驱动单元;
远程操作控制单元,被配置为批准作为执行远程操作的权限的远程操作权;以及
动作控制单元,被配置为根据由被授予所述远程操作权的信息处理装置响应于给其他车辆的移动指令而执行的远程操作来控制所述驱动单元。
(12)一种信息处理装置,包括:
车辆检测单元,被配置为检测第一车辆;以及
车辆控制单元,被配置为请求作为远程地操作所述第一车辆的权限的远程操作权,并且在被授予所述远程操作权的情况下,响应于移动第二车辆的指令,远程地操作所述第一车辆。
(13)根据(12)所述的信息处理装置,还包括:
通信单元,被配置为从所述第二车辆或者与所述第二车辆相关联的信息终端接收所述移动指令,其中
所述车辆控制单元响应于所述移动指令远程地操作所述第二车辆并且远程地操作所述第一车辆。
(14)根据(12)所述的信息处理装置,其中
所述第二车辆从与所述第二车辆相关联的信息终端接收移动指令,并且生成与所述移动指令相对应的行动计划,以及
所述车辆控制单元根据所述行动计划远程地操作所述第一车辆。
(15)根据(12)至(14)中任一项所述的信息处理装置,其中
所述车辆控制单元通过在停车场中移动所述第一车辆来控制所述第一车辆的位置。
(16)根据(15)所述的信息处理装置,其中
所述车辆控制单元向所述第一车辆指示停车场中的移动路线。
(17)根据(15)或(16)所述的信息处理装置,其中
所述车辆控制单元向进入停车场的车辆请求远程操作权。
(18)根据(15)至(17)中任一项所述的信息处理装置,其中
所述车辆控制单元在所述第一车辆从停车场出库的情况下,归还远程操作权。
(19)一种信息处理方法,包括:
由信息处理装置执行
检测第一车辆;
请求作为远程地操作所述第一车辆的权限的远程操作权;以及
在被授予远程操作权的情况下,响应于移动第二车辆的指令来远程地操作所述第一车辆。
(20)一种用于使计算机执行处理的程序,所述处理包括以下步骤:
检测第一车辆;
请求作为远程地操作所述第一车辆的权限的远程操作权;以及
在被授予远程操作权的情况下,响应于移动第二车辆的指令来远程地操作所述第一车辆。
注意,这里描述的效果仅是示例性的并且不限于这些。可能会有额外的影响。
附图标记列表
1停车控制系统
11-1至11-n车辆
12-1至12-n信息终端
13控制装置
51停车场
100车辆控制系统
107驱动系统控制单元
108驱动系统
112自动驾驶控制单元
113远程操作控制单元
131检测单元
132自身位置估计单元
133状况分析单元
134计划单元
135动作控制单元
141车外信息检测单元
143车辆状态检测单元
153状况识别单元
161路线计划单元
162行动计划单元
163动作计划单元
201CPU
251停车控制单元
261车辆检测单元
262计划单元
263车辆控制单元
264门控制单元
- 车辆控制装置、车辆控制方法、车辆、信息处理装置、信息处理方法以及程序
- 信息处理装置、车辆、信息处理系统、程序及信息处理方法