致动的喷射器系统
文献发布时间:2023-06-19 12:02:28
相关申请的交叉引用
本申请要求2018年12月11日提交的编号为16/216,120的申请的权益,该申请的公开内容通过引用合并于此。
技术领域
背景技术
各种类型的运载工具,诸如汽车、卡车、摩托车、公共汽车、船、飞机、直升机、割草机、休闲车、游乐园车辆、农场设备、建筑设备、有轨电车、高尔夫球车、火车、手推车等,可以配备各种类型的传感器,以便检测运载工具的环境中的对象。例如,运载工具诸如自主运载工具可以包括扫描和记录来自运载工具的环境的数据的LIDAR、雷达、声纳、相机或其它这样的成像传感器。来自这些传感器中的一种或更多种的传感器数据可以用于检测对象及其各自的特征(位置、形状、航向、速度等)。
然而,这些运载工具经常受到会导致这些传感器上堆积碎屑和污染物的环境元素诸如雨、雪、泥土、冷凝物等影响。通常,传感器包括盖以保护传感器的内部传感器部件免受碎屑和污染物影响,但随着时间的推移,盖本身可能变脏。这样,由于内部传感器部件发送和接收的信号被碎屑和污染物阻挡,所以内部传感器部件的功能可能受到阻碍。
发明内容
本公开的方面提供了一种用于清理传感器盖的系统。该系统可以包括:喷射器;支撑件,其中喷射器安装到支撑件;以及定位装置,其中定位装置配置为调节喷射器在支撑件上的位置,以及其中喷射器配置为将流体流引导至传感器盖。
在一些情况下,喷射器包括喷嘴,其中喷嘴被定位成将流体流引导至传感器盖的一区域。在一些示例中,喷嘴是可调节的,以将流体流引导至传感器盖的另外的区域。
在一些情况下,该系统可以包括一个或更多个附加喷射器。所述一个或更多个附加喷射器可以安装在支撑件上。在一些示例中,该系统可以包括一个或更多个附加支撑件。所述一个或更多个附加喷射器可以安装在所述一个或更多个附加支撑件上。在一些情况下,定位装置可以是线性致动器。线性致动器可以经由臂附接到喷射器,其中臂被配置为调节喷射器在支撑件上的位置。
在一些情况下,支撑件可以包括多个凹槽,喷射器可以包括齿轮系统,其中齿轮系统在所述多个凹槽中是可旋转的。喷射器可以进一步包括涡轮机,其中涡轮机被配置为使齿轮系统在所述多个凹槽中旋转。
在一些情况下,该系统可以进一步包括轨道。支撑件可以位于轨道内。在一些情况下,该系统可以进一步包括电机。电机可以配置为使支撑件在轨道内以及围绕传感器盖旋转。支撑件可以附接到轨道,电机被配置为使轨道围绕传感器盖旋转。
在一些情况下,该系统可以进一步包括用于向喷射器提供流体的泵。
在一些情况下,该系统可以进一步包括致动器,其中致动器可以被配置为调节支撑件相对于传感器盖的高度。
在一些情况下,流体可以是水、防冻剂、清洁剂、气体和肥皂中的一种或更多种。
在一些情况下,该系统可以进一步包括监测传感器,其中监测传感器被配置为检测一种或更多种元素在传感器盖上的堆积。在一些示例中,所述一种或更多种元素可以是冰、雪和冷凝物的任何组合。在一些情况下,监测传感器在检测到一种或更多种元素在传感器盖上的堆积时可以触发喷射器朝着所述一种或更多种元素的方向将流体流引导到传感器盖上。
附图说明
本技术借由示例而非借由限制在附图的图中示出,在附图中类似的附图标记指代相似的元件,附图包括:
图1示出了根据本公开的方面的附接到运载工具的传感器。
图2示出了根据本公开的方面的连接到电机的传感器盖。
图3示出了根据本公开的方面的将流体流引导到传感器盖上的喷嘴。
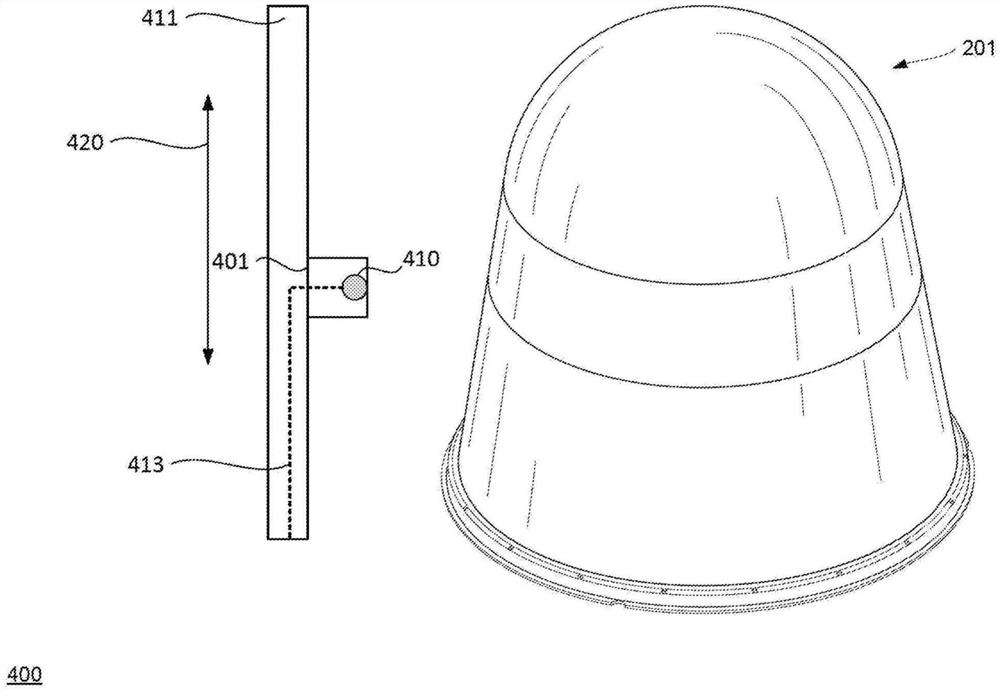
图4示出了根据本公开的方面的可重新定位的喷射器系统。
图5A和图5B示出了根据本公开的方面的喷射器的重新定位。
图6示出了根据本公开的方面的可重新定位的喷射器系统。
图7示出了根据本公开的方面的液压重新定位系统。
图8示出了根据本公开的方面的在支撑件上具有多个喷射器的可重新定位的喷射器系统。
图9示出了根据本公开的方面的具有多个支撑件的可重新定位的喷射器系统。
图10示出了根据本公开的方面的可伸缩的可重新定位的喷射器系统。
图11示出了根据本公开的方面的位于轨道中的可伸缩的可重新定位的喷射器系统。
图12示出了根据本公开的方面的污染物去除系统。
图13示出了根据本公开的方面的可重新定位的喷射器系统。
具体实施方式
本技术涉及去除或以其它方式防止环境元素在传感器上堆积以便确保适当的操作。传感器可以包括盖以保护内部传感器部件免受诸如雨、雪、灰尘、泥土、冷凝物和其它此类碎屑(这里统称为污染物)的元素影响。然而,盖本身会随着时间的推移被覆盖,诸如当在建筑工地附近操作时被泥土覆盖,或当在暴风雪期间操作时被雪覆盖。此外,传感器的内部(即在传感器盖之内)和传感器的外部环境(即在传感器盖之外)之间的温差可能导致在传感器的盖上形成冷凝物。因此,由于内部传感器部件发送和接收的信号可能被所述元素和/或冷凝物阻挡,所以传感器的内部传感器部件的功能可能受到阻碍。这些问题在具有较大盖的传感器中可能加剧,因为在较大的传感器盖上元素堆积的可能性更大,并且在依赖这些传感器生成的数据来做出驾驶决策的自主运载工具的情况下尤其成问题。
堆积在传感器盖上的污染物可以通过提供临时或连续的流体流而被去除。例如,诸如冬季风暴期间的雪和冰的污染物可能随着运载工具在旅途中前进而堆积在传感器盖上。在污染物对传感器的内部部件的操作产生影响时或之前,位于传感器盖周围的可包括喷嘴的喷射器可以提供定向流体流以喷射和/或融化掉污染物。然而,对于较大的传感器盖,位于传感器盖周围的喷射器可能无法以到达和清除污染物所需的距离、方向或力来提供流体流。此外,当流体流以不足以有效清除污染物的力施加到传感器盖时,可能需要更多的流体,导致流体的低效使用。
为了解决这些问题,可重新定位的喷射器系统可以将喷射器对准在一位置,在该位置处可以以足以高效去除污染物的力施加流体流。可重新定位的喷射器系统可以包括喷射器和支撑件。喷射器可以可移动地安装或以其它方式附接到支撑件,使得喷射器可以在支撑件上上下移动。喷射器可以包括配置为输送流体流以去除污染物的喷嘴。
喷射器相对于传感器的位置可以通过定位装置来调节。致动器可以使喷射器在支撑件上上下移动,从而调节喷射器相对于传感器盖的对准。在一些情况下,定位装置可以经由减速驱动器和涡轮机被液压地操作。就此而言,喷射器相对于传感器的定位可以通过经由涡轮机驱动流体流来调节,涡轮机进而可以使减速驱动器旋转,这进而可以使喷射器在凹槽内沿第一方向移动。流体流可以在流过涡轮机之后由喷射器的喷嘴输出。当流体流停止时,涡轮机可以不再由流体驱动并且喷射器可以沿相反的第二方向移动。
多个喷射器可以位于支撑件上,并且多于一个的支撑件可以位于传感器周围。就此而言,每个喷射器可以能够将流体流引导到传感器盖的相同或不同的区域。此外,将多于一个的支撑件定位在传感器周围可以允许一个支撑件上的喷射器将流体流引导到传感器盖的无法被位于不同支撑件上的其它喷射器喷射到的部分。
轨道可以位于传感器周围,以提供用于使一个或更多个支撑件绕传感器行进的路径。通过这样做,支撑件上的喷射器可以能够向传感器盖的多个部分提供流体流。
运载工具可以具有一个或更多个传感器以检测运载工具外部的对象,诸如其它运载工具、道路中的障碍物、交通信号、标志、树木等。例如,如图1所示的运载工具101可以包括捕获图像并记录可由运载工具内的计算装置处理的数据的激光器、声纳、雷达、相机和/或任何其它检测装置。运载工具的传感器诸如LIDAR、雷达、相机、声纳或其它此类成像传感器可以捕获图像并检测对象及其特征,诸如位置、取向、尺寸、形状、类型、移动的方向和速度等。图像可以包括由传感器捕获的原始(即,未经处理的)数据和/或由相机传感器捕获的图片和视频。图像还可以包括处理过的原始数据。例如,来自传感器的原始数据和/或前述特征可以被量化或整理成描述性函数或向量以供计算装置处理。图像可以被分析以确定运载工具的位置,并在需要时检测和响应对象。
传感器可以布置在运载工具的外部或内部周围。例如,壳体130、140、142、150、152可以包括例如一个或更多个LIDAR装置。传感器还可以并入典型的运载工具部件,诸如尾灯/转向信号灯104和/或侧视镜108。在一些情况下,一个或更多个激光器、雷达、声纳、相机和/或其它此类成像传感器可以安装在顶部,诸如在壳体122中,附接到安装座120。
运载工具传感器可以由内部传感器部件、用于容纳内部传感器部件的盖以及盖窗组成。盖窗可以被构造在传感器盖上的特定位置,并且内部传感器部件可以通过盖窗发送和接收一个或更多个信号。传感器盖可以配置成各种形状和尺寸,诸如球体、圆柱体、长方体、圆锥体、棱柱体、棱锥体、立方体等。例如,如图2所示,传感器201的传感器盖215可以被配置为使得它具有圆顶形部分217,该圆顶形部分217具有呈平截头体形状的侧壁205。传感器盖215可以由诸如塑料、玻璃、聚碳酸酯、聚苯乙烯、丙烯酸、聚酯等的材料组成。
如上所述,盖可以包括盖窗,内部传感器部件可以通过该盖窗发送和接收信号。例如,如图2进一步所示,传感器盖215的侧壁205可以包括并入其中的盖窗216,以允许信号(未示出)穿透传感器盖215。尽管盖窗216被示出为仅是侧壁205的一部分,但是在一些情况下,整个侧壁205可以被构造为盖窗。此外,多个盖窗可以位于传感器盖215上。盖窗216可以由与传感器盖215相同或不同的材料组成。在一些情况下,整个传感器盖215或传感器盖的大部分可以是可被内部传感器部件发送和接收的信号穿透的,从而允许整个传感器盖215用作盖窗。
传感器可以经由传感器轴附接到电机。例如,如图2进一步所示,传感器轴230可以包括第一端232和第二端234。传感器轴的第一端232可以附接到传感器电机220,传感器轴的第二端234可以连接到传感器201和传感器盖215,诸如传感器盖的基部206。就此而言,传感器轴的第一端232可以经由带、齿轮、链条、摩擦辊等附接到电机320。电机220可以使传感器轴230在第一方向235上旋转,导致整个传感器201也在第一方向235上旋转。在一些实施方式中,传感器轴230可以仅使传感器盖215旋转,而不使传感器的内部部件旋转。传感器201和电机220可以均位于运载工具的内部或外部。
可以通过提供临时或连续的流体流来去除堆积在传感器盖上的元素。例如,当运载工具诸如在暴风雪和/或冰暴期间在旅途中前进时,可能代表雪和冰、泥土、泥浆、沙子、树叶或其它此类元素的污染物330可以堆积在传感器201的传感器盖215上,如图3所示。在污染物330影响传感器的内部部件的操作时或之前,位于传感器盖215附近的喷嘴310,诸如喷射喷嘴,可以提供定向流体流320以喷射和/或融化掉污染物330,如图3进一步所示。流体可以是任何类型的液体,诸如水、防冻剂、清洁剂、气体和/或肥皂。
可重新定位的喷射器系统可以将喷射器对准在一位置,在该位置处可以以足以高效去除污染物和碎屑的力施加流体流。可重新定位的喷射器系统调节喷射器位置的能力允许喷射器克服固定装置(例如,图3所示的喷嘴310)遇到的问题,包括无法以到达并清除传感器盖上的污染物所需的距离、方向和/或力来提供流体流。转向图4的示例,可重新定位的喷射器系统400可以包括喷射器401和位于传感器诸如传感器201附近的支撑件411,如图4所示。喷射器401可以可移动地安装或以其它方式附接到支撑件411,使得喷射器可以在支撑件上上下移动,如箭头420所示。导管413,诸如橡胶软管,可以位于支撑件411内。导管413的一端可以连接到位于喷射器401上和/或内的喷嘴410以输送流体。在一些情况下,导管413可以部分地或完全地从支撑件的外部通向喷射器。
定位装置可以控制喷射器的对准。就此而言,可重新定位的喷射器系统500可以包括致动器501,如图5A和图5B所示。致动器501可以是能够将喷射器定位在一定位置的线性致动器。致动器501可以经由臂503附接到喷射器401。在启动时,致动器501可以将臂503移向传感器盖的圆顶形部分217,如图5A所示,或向下移向传感器盖的基部206,如图5B所示。喷射器401可以在与喷射器所附接到的臂503相同的方向上移动。尽管致动器501在图5A和图5B中被示出为位于运载工具511的主体内,但是致动器可以位于运载工具的主体外部、在支撑件内和/或在喷射器内。在一些情况下,定位驱动器可以是其上附接有载体的导螺杆。载体可以附接到一个或更多个喷射器。电机可以使导螺杆旋转,这可以导致载体和附接到其的喷射器沿着导螺杆移动。当螺杆的旋转方向反转时,载体可以在相反方向上移动。
喷射器相对于传感器盖的对准可以基于要清除的碎屑的位置。就此而言,致动器501可以从这里进一步描述的控制器接收指令,其中喷射器401应被定位以清除污染物。例如,控制器可以指示致动器501将喷射器401定位在传感器盖的圆顶形部分217附近以通过从喷嘴410提供流体流520来清除污染物530。在另一示例中,控制器可以指示致动器501将喷射器401定位在传感器盖的基部206附近以通过从喷嘴410提供流体流521来清除污染物531。
电机和能够移动喷射器的其它此类装置也可以用于控制喷射器的定位。例如,并且如图6所示,可与可重新定位的喷射器系统400相比较的可重新定位的喷射器系统600可以包括附接到减速驱动器602的电机601。减速驱动器可以经由诸如臂603的连接件附接到喷射器401。电机可以驱动减速驱动器602,其在支撑件411上上下移动喷射器401和/或臂603,如箭头620所示。减速驱动器602可以通过减少电机601产生的旋转移动的量来控制喷射器401的移动速率。
在一些情况下,定位装置可以被液压地操作。例如,如图7所示,定位装置可以包括齿轮系统701,诸如附接到位于喷射器401内的涡轮机703的减速驱动器。喷射器401可以附接到支撑件411内的凹槽711。就此而言,齿轮系统701的一个或更多个齿轮可以定位为使得它们在凹槽711内是可旋转的,如图7进一步所示。经过导管413的流体可以使涡轮机703旋转,这进而使齿轮系统702旋转。齿轮系统702的旋转可以使喷射器401从支撑件的基部730处的静止位置在凹槽711内沿第一方向移动,如箭头720所示。在流体停止经过喷射器401时,喷射器401可以在凹槽711中沿相反的第二方向移动回到支撑件411的基部730处的静止位置。
可重新定位的喷射器系统可以包括自动反向功能。自动反向功能可以包括开关,在喷射器到达支撑件上的一个或多个预定位置时,该开关使齿轮箱沿相反方向旋转。例如,自动反向功能可以在喷射器到达支撑件上的与传感器盖的顶部对应的位置时被触发,并在喷射器到达支撑件上的与传感器盖的底部对应的位置时被再次触发。在一些情况下,涡轮机和齿轮箱可以使凸轮(未示出)旋转,该凸轮控制喷射器在轴上的行进距离和行进方向。凸轮可以配置为在喷射器到达轴上的一定距离时自动改变喷射器的方向。
支撑件可以包括多于一个的喷射器。例如,如图8所示,多个喷射器801A-801X可以位于单个支撑件811上,该支撑件811可以与支撑件411相比较。每个喷射器801A-801X可以能够将流体流引导至传感器盖215的相同或不同区域。例如,传感器盖215上的污染物830A-830X可以分别经受喷射器801A-801X输送的流体流820A-820X。每个喷射器801A-801X在支撑件811上的对准可以由一个或更多个致动器诸如致动器850控制。就此而言,每个致动器可以控制单个喷射器、成对喷射器或成组喷射器的对准。在一些情况下,可以使用电机代替致动器。尽管致动器850在图8中被示出为位于运载工具821的主体内,但是致动器可以位于运载工具的主体外部和/或在支撑件811或喷射器801A-801X内或附接到支撑件811或喷射器801A-801X。
多于一个的支撑件可以位于传感器盖周围。例如,图9示出了位于传感器盖215的相反两侧的两个支撑件911A和911B,它们可与支撑件411相比较。每个支撑件901A和901B上的可与喷射器401相比较的喷射器可以能够将流体流引导至传感器盖215的相同或不同部分。就此而言,每个喷射器的移动可以由一个或更多个致动器控制。
在一些情况下,当不使用时,支撑件可以缩回到运载工具的主体内。就此而言,当不使用时,致动器诸如图10所示的线性致动器1022可以将可分别与支撑件411和喷射器401相比较的支撑件1011和喷射器1001移动到运载工具1021的主体内,以避免干扰传感器201的操作。当需要可重新定位的喷射器系统时,线性致动器1022可以使支撑件伸出运载工具的主体。
轨道可以位于传感器周围。轨道可以提供围绕可重新定位的喷射器系统的支撑件的路径,可以旋转以将喷射器引导至传感器盖的不同部分。例如,如图11所示,轨道1101位于运载工具的主体(为清楚起见没有被示出)内并且支撑件1111附接到其。致动器1102可以使轨道1101内的支撑件1111和/或轨道本身在箭头1103所示的方向上旋转以定位可与喷射器401相比较的喷射器1104。喷射器相对于传感器201的位置可以由控制器确定,如这里所述。
可重新定位的喷射器系统可以是污染物去除系统的部分,该污染物去除系统可以包括泵以迫使流体通过喷嘴以将流体流输送到污染物。例如,如图12所示,污染物去除系统1200可以包括泵1255和可重新定位的喷射器系统1201,其可与污染物去除系统400和600相比较。泵1255和可重新定位的喷射器系统1201可以经由一个或更多个导管1260A-C连接在一起。所述一个或更多个导管可以是能够使流体传导到污染物去除系统的部件的或能够使流体从污染物去除系统的部件传导的橡胶、塑料、金属或其它此类管道。尽管图12中示出了三个导管1260A-C,但是污染物去除系统中可以存在更少或更多的导管。就此而言,导管的数量可以基于污染物去除系统1200内的装置的数量和这些装置之间所需的连接件的数量。例如,随着可重新定位的喷射器系统1201中的喷嘴和喷射器的数量增加,如这里所讨论的,来自泵1255和/或加热器1230的导管的数量可以增加。另外,污染物去除系统可以包括多于一个的泵和加热器,这导致需要附加的导管。
污染物去除系统1200包括流体源1250。就此而言,流体源1250可以是储存由可重新定位的喷射器系统1210输出的流体的塑料储液器或其它此类容器。例如,并且如图12所示,泵1255可以经由导管1260C连接到流体源1250。在一些情况下,泵1255可以位于流体源1250内。当污染物去除系统1200诸如通过控制器1280的控制操作时,泵1255可以使流体以特定压力通过导管1260A-C从流体源1250行进到可重新定位的喷射器系统1201。
可重新定位的喷射器系统1201可以以特定的速度将(多个)定向流体流施加到传感器盖。就此而言,参照图12和图13两者,基于由泵1255产生的流体的压力和喷嘴410的流速,可以控制和调节由喷嘴410输出的流体520的定向流的速度。就此而言,喷嘴410的流速和由泵1255产生的压力可以增大和/或减小以产生特定速度的定向流体流1320。在一些情况下,定向流体流可以具有从距喷嘴面约25mm或更大或更小处测得的约8米/秒或更大或更小的速度,以清理距喷嘴面约4mm或更大或更小处的传感器盖诸如传感器盖215。
可重新定位的喷射器系统1201的一个或更多个喷嘴可以在特定方向上施加定向流体流。就此而言,参照图13,喷嘴410的方向可以是固定的或可调节的,并且可以被设置为使得其将定向流体流喷射到传感器盖的特定区域上。在一些情况下,喷嘴的方向可以被手动调节,使得喷嘴可以将定向流体流喷射到传感器盖的多于一个的区域上。在一些情况下,喷嘴410的方向可以由电机控制,使得喷嘴的方向可以例如响应于来自控制器1280的指令被自动引导到传感器盖的特定位置。
在某些情况下,可以基于喷嘴的方向和定向流体流的速度来调节定向流体流相对于传感器盖的角度。就此而言,定向流体流1320可以以特定角度接触传感器盖215,从而在特定方向上冲开传感器盖上的元素诸如污染物1330。例如,定向流体流1320可以接触传感器盖,使得污染物1330被向上并远离传感器窗216引导。
在一些情况下,当所述一个或更多个喷射器施加定向流体流时,传感器盖可以旋转。例如,如图2所示,传感器盖215可以在第一方向235上旋转。在传感器盖215的旋转期间,喷射器诸如喷射器401可以将流体流引导至传感器盖215。通过这样做,定向流体流可以接触传感器盖215的整个周界部分或区域,诸如整个传感器窗216或传感器盖的另外的某个部分。
当流体从泵行进到喷嘴时,加热器可以用于在流体被喷射到传感器上之前加热流体。例如,再次参照图12的污染物去除系统,加热器1230可以位于泵1255和喷嘴可重新定位的喷射器系统1201之间。当流体从泵1255经由导管1260B行进并经由导管1260A行进到可重新定位的喷射器系统1201时,加热器1230可以加热流体。当由可重新定位的喷射器系统1201输出时,加热的流体可以被喷射到传感器盖215上的元素诸如污染物1330上,从而使碎屑和污染物被流体融化,以及被吹走或以其他方式喷射走。在一些情况下,除了加热器1230之外或代替加热器1230,冷却器(未示出)可以用于使加压流体在由喷嘴输出之前冷却。加热器1230可以直接连接到流体源,从而加热流体源的内容物,诸如流体。在一些情况下,加热器可以被单独供电或使用来自运载工具的其它部件诸如传动系统或电子冷却回路的废热。为了加热或帮助加热器加热流体源1250内的流体,流体源1250可以位于运载工具的温暖部分,诸如在舱室内或靠近热源诸如传动系统或电子冷却回路。
在一些情况下,可以将加热的流体提供给传感器盖以防止或去除冷凝物堆积。就此而言,向传感器盖215施加临时或连续的加热流体流可以使传感器盖的温度升高,从而防止形成冷凝物。传感器盖215的加热还可以使传感器盖上的任何冷凝物更快地蒸发。例如,图13示出了堆积在传感器窗216上的可以是冷凝物的污染物1330,该传感器窗216并入到传感器201的传感器盖215中。加热的定向流体流可以被喷射在传感器窗216的在此已经堆积了污染物1330的部分上。通过这样做,传感器窗216可以升温,从而防止附加冷凝物的形成。另外,加热的定向流体流可以使堆积的凝结的污染物1330快速蒸发。此外,施加到盖的外表面的热可以通过传感器盖传导,加热传感器盖的内表面,导致冷凝物从传感器盖的内表面蒸发。
在一些情况下,可以将定向流体流提供到传感器盖上的位置,传感器通过所述位置捕获诸如图像、光等的传感器数据。如这里所讨论的,内部传感器部件可以通过传感器窗诸如传感器盖215上的传感器窗216发送和接收信号。因此,只要传感器窗216保持没有堆积物,内部传感器部件就可以继续捕获传感器数据而不受来自元素或冷凝物的干扰。因此,加热的和/或未加热的定向流体流可以仅被施加到传感器窗216和/或传感器窗216周围的区域以防止冷凝物或元素堆积在传感器窗216上。
在一些示例中,附加传感器可以用于自动确定何时将流体施加到传感器盖以及是否应加热流体。就此而言,附加传感器,诸如位于传感器盖215的内部或邻近传感器盖215的外部的一个或更多个湿度传感器或相机,可以用于针对冷凝物或元素的堆积来监测传感器盖。在出现堆积的预定阈值时,附加传感器可以触发将流体施加到盖。例如,图13的传感器550可以监测污染物在传感器201附近或在传感器201上的堆积。当污染物的堆积达到预定的堆积阈值时,传感器550可以触发控制器1280操作污染物去除系统1200,并产生对盖201的流体施加。
例如,基于由传感器盖内的一个或更多个相机捕获到的图像的集合,一个或更多个相机传感器可以将传感器盖的一部分随时间的闭塞确定为图像内的遮挡,或者图像的锐度下降可能增加。在一些情况下,可以比较观察相同场景的不同传感器(例如不同相机)生成的图像以发现显著差异,该显著差异将会表明传感器视图之一存在问题。例如,激光雷达传感器可以检测场景区域内返回信号强度和时间的突然且持续的变化。根据激光雷达配置,这取决于窗是否随传感器旋转可以是点或变化带。在交替周期通过多个窗看到场景的旋转的激光雷达可以观察到一个窗与另一窗之间的场景数据差异,从而指示强度在此下降的堆积。
附加传感器还可以监测传感器中和周围的湿度水平和温度,以确定是否会形成冷凝物。在确定可以形成冷凝物时,附加传感器可以触发向盖施加加热流体。在一些情况下,当确定内部部件的信号正受到阻碍时,传感器本身或附加传感器可以启动向传感器盖施加流体。
参照回图12,污染物去除系统1200可以包括控制器1280,诸如一个或更多个微处理器、处理器、计算机装置等,该控制器1280可以控制污染物去除系统的部件的操作。就此而言,控制器1280可以连接到泵1255和加热器以及系统的其它部件,诸如这里描述的附加传感器,诸如监测传感器盖215的传感器550。当接收到参与的信号或基于从诸如监测传感器550的附加传感器接收到的数据确定系统应参与,控制器1280可以触发污染物去除系统1200的一个或更多个部件参与。例如,在确定传感器盖诸如传感器盖215被冷凝物或其它元素覆盖时,控制器1280可以触发泵1255参与,导致可重新定位的喷射器系统将流体流输出到传感器盖上。在清除了传感器盖上的泥土、碎屑和其它此类污染物时,控制器可以使污染物去除系统1200的部件脱离参与。在一些情况下,控制器可以从传感器盖内以及从运载工具的外部接收温度和湿度数据,以确定在污染物去除系统的操作期间加热器1230应参与还是脱离参与。就此而言,假设环境温度低于阈值,诸如40华氏度或更高或更低,控制器可以在泵1220参与时触发加热器参与。
在一些情况下,控制器可以从手动操作的输入件诸如开关、按钮、杠杆等接收信号。响应于接收到的信号,控制器1280可以使污染物去除系统1200参与或脱离参与。
即使当传感器的盖由于碎屑、污染物、冷凝物和其它此类元素的堆积而变脏或变湿时,这里描述的特征也可以允许传感器的继续使用。这样,运载工具可以在产生大量碎屑和污染物的环境(诸如下雨或下雪的户外或在建筑工地或越野位置)中持续操作。此外,可以使用较少的流体,因为可以从喷射器输出突发的流体,该喷射器更靠近污染物和其它元素定位以有效地清理传感器盖。此外,这里描述的特征可以消除对擦拭器从传感器的盖擦拭污染物的需要,导致更少的用于清理传感器盖的移动部分。
大多数前述替代示例不是相互排斥的,而是可以以各种组合来实施以实现独特的优势。由于可以在不背离由权利要求限定的主题的情况下利用以上讨论的特征的这些及其它变化和组合,因此对实施方式的前述描述应被当作说明而不是对权利要求限定的主题的限制。作为示例,前面的操作不必按上述精确顺序执行。更确切地,可以按不同的顺序(诸如按颠倒的顺序或同时)处理各个步骤。步骤也可以被省略,除非另有说明。此外,这里描述的示例以及被措辞为“诸如”、“包括”等的短语的提供不应被解释为将权利要求的主题限制于特定示例;更确切地,这些示例仅旨在说明许多可能的实施方式之一。此外,不同附图中的相同附图标记可以标识相同或相似的元件。
- 用于喷射器阀的检测方法、致动方法以及喷射器单元
- 致动的喷射器系统