一种矿山边坡稳定性控制方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及矿山边坡稳定性控制领域,具体涉及一种矿山边坡稳定性控制方法。
背景技术
矿山边坡稳定性对于露天矿井安全回采具有举足轻重的作用,但针对矿山稳定性预警方法的现有技术文献较多,比如:文献CN201810336973.0根据计算模型、潜在滑移面抗剪强度参数,计算工况条件下边坡的稳定系数k0;根据传统计算方法获得的边坡稳定系数ki与基于边坡稳定性分级分析和岩体结构面精细取值确定的边坡稳定系数k0计算随机误差δr;比较边坡稳定状态和基于边坡稳定性分级分析和岩体结构面精细取值确定的边坡稳定系数的差异性,进而确定边坡稳定系数系统误差δs;计算边坡稳定系数系统误差δs和随机误差δr绝对值之和,确定边坡稳定系数计算误差δ,从而定量确定大型露天矿山边坡设计安全系数;文献CN201811450877.5公开一种露天矿山岩体结构面等效抗剪强度参数分级确定方法,将基于滑面法向应力分布规律,针对不同等级的露天矿山边坡,在边坡稳定性分级分析的基础上,依据不同级别潜在滑移面上法向应力分布规律,合理确定结构面粘聚力与内摩擦角。
然而,针对于矿山边坡稳定性控制方法缺乏必要的与现场实际情形结合紧密的力学模型、迭代算法。
由鉴于此,发明一种矿山边坡稳定性控制方法是非常必要的。
发明内容
为了解决上述技术问题,本发明提供一种矿山边坡稳定性控制方法,以解决上述背景技术中提出的问题。
一种矿山边坡稳定性控制方法,其特征在于,包括以下步骤:
步骤A:在现场进行取样,实施物理实验室参数测定,主要测定取样岩块的弹性模量E、泊松比ν、密度ρ、初始摩擦系数μ
步骤B:建立数学计算模型,通过对比抗滑力和滑动力的大小关系,判定矿井边坡初始状态是否稳定。
针对滑移体进行受力分析,滑移体受重力大小为G,滑动力大小为S,抗滑力大小为R,则初始抗滑力表达式为:R=C
步骤C:当弱面倾角ɑ不满足公式(1),那么将进行矿井边坡倾角的优化设计,减小倾角ɑ,最终使得抗滑力R、滑动力S满足S≤R。
步骤D:若边坡滑移体的抗滑力R、滑动力S满足步骤C的初始判定条件,进一步借助于有限元数值计算迭代法来判定边坡稳定性,若有限元公式计算结果发散,说明了边坡结构失衡;若有限元公式计算结果收敛,则边坡结构稳定。
步骤E:为加强塑性区精准监测,采取布置声发射探头(AE)组合,实时采集坡体受动载影响塑性区变化规律,所述的声发射探头(AE)与AVR单片机通过信号线相连,所述的AVR单片机与上位机组合借助无线红外发射探头、无线红外接收探头实时通信,所述的上位机控制片与LCD屏通过信号线相连以实时显示塑性区发展区域。
步骤F:针对步骤E探测的塑性区范围,为避免边坡坡体上下裂隙区贯穿失稳,采用注浆管道、锚固及大直径钻孔控制方法。
2.根据权利要求1所述的矿山边坡稳定性控制方法,其特征在于:所述的步骤D还可划分为D1、D2、D3、D4及D5共5个子步骤:
步骤D1:设定比例因子序列{Ψ
步骤D2:变量等效计算。针对边坡弱面倾角ɑ、岩块摩擦系数μ
步骤D3:等量步长迭代。以边坡截断面为计算对象,采用步长等距法,设定某点步长增量为Δλ
从i=2开始,采用Newton线性迭代建立,得到临界比例因子为:
ψ
步骤D4:若按照迭代公式(6)得到收敛解,继续按照步骤D1~D3继续迭代求解;若无法得到收敛解,说明了边坡坡体塑性区较大,甚至出现塑性区贯通的情况,边坡稳定性不足与现有技术相比,本发明的有益效果为:
1、算法准确可靠:本发明针对边坡坡体建立力学数学模型,实施对边坡设计的初步判定;借助于Newton线性迭代建立临界比例因子ψ
2、监测准确:本发明通过迭代计算获取摩擦系数μ
3、多重控制措施有效:针对数学迭代与声发射探头(AE)共同的塑性区,采取离层注浆、锚固二次紧固及大直径钻孔实施塑性区周边卸压,降低了应力集中。
附图说明
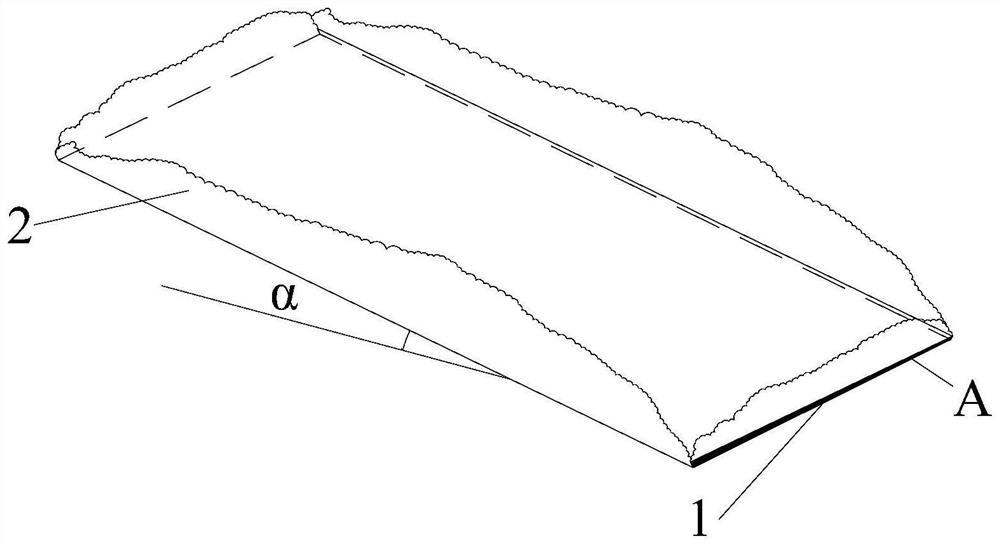
图1是本发明的矿井边坡坡体结构示意图。
图2是本发明的边坡坡体力学结构模型示意图。
图3是本发明的临界比例因子ψ
图4是本发明的声发射探头(AE)布置示意图。
图5是本发明的大直径钻孔、注浆孔及锚固布置示意图。
图中:
1-弱面;2-滑移体;A-弱面面积;ɑ-弱面倾角;G-滑移体重力;S-滑动力;R-抗滑力;μ
具体实施方式
以下结合附图对本发明做进一步描述:
如附图1至附图5所示,本发明提供一种矿山边坡稳定性控制方法,其特征在于,包括以下步骤:
步骤A:在现场进行取样,实施物理实验室参数测定,主要测定取样岩块的弹性模量E、泊松比ν、密度ρ、初始摩擦系数μ
步骤B:建立数学计算模型,通过对比抗滑力和滑动力的大小关系,判定矿井边坡初始状态是否稳定。
针对滑移体2进行受力分析,滑移体2受重力大小为G,滑动力大小为S,抗滑力大小为R,则初始抗滑力表达式为:R=C
步骤C:当弱面1倾角ɑ不满足公式(1),那么将进行矿井边坡倾角的优化设计,减小倾角ɑ,最终使得抗滑力R、滑动力S满足S≤R。
步骤D:若边坡滑移体2的抗滑力R、滑动力S满足步骤C的初始判定条件,进一步借助于有限元数值计算迭代法来判定边坡稳定性,若有限元公式计算结果发散,说明了边坡结构失衡;若有限元公式计算结果收敛,则边坡结构稳定。
步骤E:为加强塑性区精准监测,采取布置声发射探头(AE)5组合,实时采集坡体受动载影响塑性区变化规律,所述的声发射探头(AE)5与AVR单片机7通过信号线6相连,所述的AVR单片机7与上位机组合11借助无线红外发射探头8、无线红外接收探头9实时通信,所述的上位机控制片10与LCD屏12通过信号线6相连以实时显示塑性区发展区域。
步骤F:针对步骤E探测的塑性区范围,为避免边坡坡体上下裂隙区贯穿失稳,采用注浆管道13、锚固14及大直径钻孔15控制方法。
具体地,所述的步骤D还可划分为D1、D2、D3、D4及D5共5个子步骤:
步骤D1:设定比例因子序列{Ψ
步骤D2:变量等效计算。针对边坡弱面倾角ɑ、岩块摩擦系数μ
步骤D3:等量步长迭代。以边坡截断面3为计算对象,采用步长等距法,设定某点步长增量为Δλ
从i=2开始,采用Newton线性迭代建立,得到临界比例因子为:
ψ
步骤D4:若按照迭代公式(6)得到收敛解,继续按照步骤D1~D3继续迭代求解;若无法得到收敛解,说明了边坡坡体塑性区较大,甚至出现塑性区贯通的情况,边坡稳定性不足。
以某露天开采矿井为例,阐述边坡稳定性控制方法的工作原理:
①按照步骤B进行弱面角验证,符合弱面倾角ɑ稳定性的边界条件;
②按照步骤D进行塑性区收敛性判定,一共迭代了10次,最终塑性区上下贯通,形成近似椭球体的塑性带,迭代计算参数表如下所示:
③经过椭球体塑性带内声发射探头(AE)的探测,验证破裂带集中在此区域,与迭代计算结果在误差控制范围内,现场注浆孔,向椭球体塑性区施加注浆孔,塑性区内离层高强度浆液注入,保证坡体的完整性;另一方面,注浆后在塑性区实时坡体锚固,注浆孔与锚固孔相差5~10cm距离。同时,在塑性区外侧1~1.2cm范围内施加90~120mm直径的卸压钻孔,经过声发射探头(AE)的探测,塑性区体积降低70%。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种矿山边坡稳定性控制方法
- 一种矿山边坡岩体工程稳定性精准评价系统