一种智能足浴机器人
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及一种智能足浴机器人,属于家庭机器人技术领域。
背景技术
用温水足浴时,可以刺激足部的反射区,促进人体血液循环,调理内分泌系统,增强人体器官机能,取得防病治病的保健效果,尤其许多老年人有常年泡脚的习惯,对慢性病的保健效果明显。但是老年人活动不便,起身困难,虽然市面有多种足浴盆和足浴设备,却无法为这些使用人群提供更智能便捷的使用感受。
发明内容
本发明要解决的技术问题是:现有技术没有智能自动化的足浴设备。
为了解决上述问题,本发明的技术方案是提供了一种智能足浴机器人,其特征在于:包括足浴机器人机体和综合接驳充电桩,所述足浴机器人机体包括机壳、微型计算机控制器、足浴机构、操作面板和底盘机构,所述足浴机构、操作面板和底盘机构通过微型计算机控制器进行控制;所述底盘机构设在机壳的底部,用于带动足浴机器人移动,所述操作面板设在足浴机构上用于对足浴机构的足浴模式进行设置;所述足浴机构为中空腔体结构,内部设有按摩单元,底部设有入水口和出水口分别连通机器人机体进水口和机器人机体排水口;
所述机壳设在足浴机构外侧,机壳内设有加热器,用于对足浴机构进行加热;充电单元,与综合接驳充电桩对接用于足浴机器人充电;循环泵,分别连接设在足浴机构上的入水口和出水口,实现足浴机构内的水循环;
所述综合接驳充电桩上设有充电桩接驳端子、进水接口和排水接口,足浴机器人机体与综合接驳充电桩接驳状态时充电单元与充电桩接驳端子对接,机器人机体进水口和机器人机体排水口分别与进水接口和排水接口对接。
优选地,所述充电单元包括锂电池组和充电端子,所述锂电池组通过充电端子与综合接驳充电桩的充电桩接驳端子对接用于足浴机器人充电。
优选地,所述操作面板上设有旋钮开关、触控开关和便于操作的触摸显示屏,用于对足浴机构的足浴模式进行设置。
优选地,所述底盘机构的底部设有至少四个全向驱动单元用于带动足浴机器人移动;底盘机构的前部和左右两侧设有接触传感器用于在足浴机器人的行进过程中进行碰撞保护;底盘机构的前部中间区域设有激光雷达传感器用于绘制地图和检测空间坐标和障碍;底盘机构的后部中间区域设有视觉传感器和红外传感器用于和所述综合接驳充电桩进行对接检测;所述底盘机构的后部下方设有充电端子和机器人机体排水口与综合接驳充电桩对接。
优选地,所述全向驱动单元采用麦克纳姆轮作为驱动轮,采用全向驱动技术,实现足浴机器人在任意方向的平移及在原地旋转。
优选地,所述驱动轮的行进方式包括直行、斜行、横行、S形行进和零半径任意角度旋转。
优选地,所述足浴机构上设有冲洗装置,所述冲洗装置包括高压水泵、连接管路、静态高压喷嘴和动态高压喷嘴,所述高压水泵设在足浴机构的外部,高压水泵通过微型计算机控制器控制,并通过连接管路分别连接静态高压喷嘴和动态高压喷嘴,所述静态高压喷嘴和动态高压喷嘴设在足浴机构的开口侧边上分别用于足浴机构内壁和按摩单元的冲洗。
优选地,还包括温度传感器,所述温度传感器设在循环泵的入水管路中,用于测量足浴机构的出水口的水温并将温度信号发送至微型计算机控制器。
优选地,还包括水位传感器,所述水位传感器设在足浴机构内部用于检测足浴机构的水位并将水位信号发送至微型计算机控制器。
优选地,所述微型计算机控制器包括运算器、控制器、存储器、输入输出IO端口、通讯端口、电源处理电路、电机驱动电路,水泵控制电路和加热器控制电路,所述通讯端口接收所述激光雷达传感器、温度传感器和水位传感器的数据信息;所述水泵控制电路控制高压水泵和循环泵的工作与停止;所述加热器控制电路控制加热器的加热功率和停止;所述电机驱动电路与所述全向驱动单元连接,控制麦克纳姆轮的运动
与现有技术相比,本发明的有益效果是:
本发明足浴机器人可根据时间和位置设定自主工作,完成接水和加温之后与综合接驳充电桩脱离移动到预设的位置,移动过程中可实现自主精确定位、自动规避障碍和自动规划路线,到达预设位置后对浴盆内水进行循环加热,保持水温在设定的温度等待使用者足浴,足浴机器人检测到使用者脚进入盆体后足浴机构开始工作,足底按摩单元可根据程序的预先设定工作,按摩过程中对足底穴位进行锤击按摩,按摩的穴位和脚掌区域可设定,完成足浴后自主移动回到综合充电桩进行充电、排水和自清洗工作,实现足浴全程的智能化和自动化。
附图说明
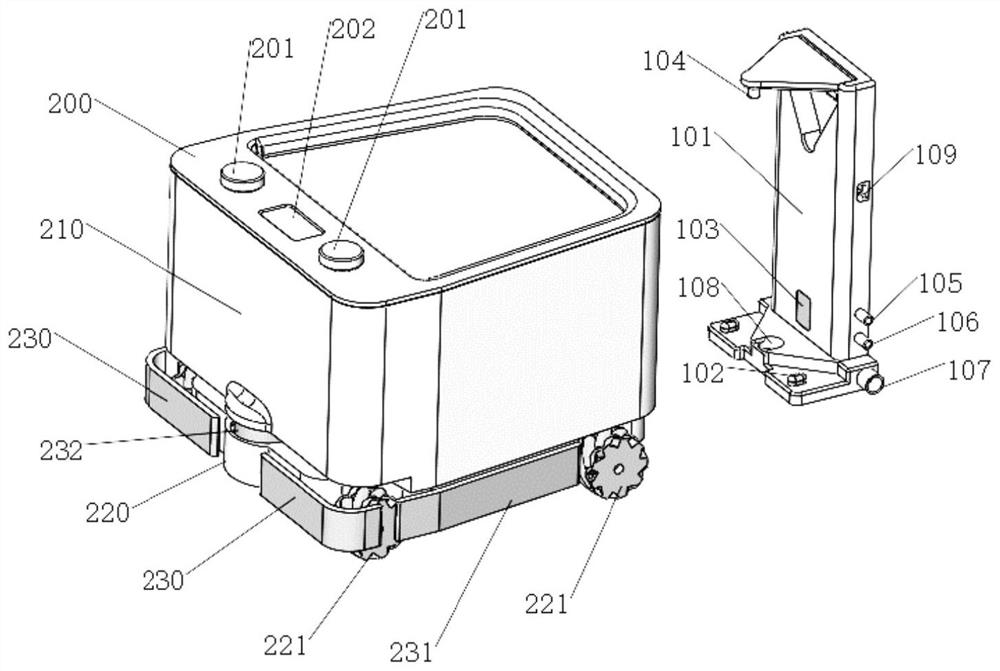
图1为本发明提供的智能足浴机器人的前上方俯视三维示意图。
图2为本发明提供的智能足浴机器人的后下方仰视三维示意图。
图3为本发明提供的智能足浴机器人的机器人机体内部三维示意图。
图4为本发明提供的智能足浴机器人的机器人机体剖面示意图。
图5为本发明提供的智能足浴机器人的上平面示意图。
图6为本发明提供的智能足浴机器人的机器人机体与综合接驳充电桩分离状态示意图。
图7为本发明提供的智能足浴机器人的机器人机体与综合接驳充电桩接驳状态示意图。
附图标记:101-综合接驳充电桩、210-足浴机器人机体、102-充电桩接驳端子、103-接驳激光发射器、104-注水出水口、105-冷水接口、106-热水接口、107-排水接口、108-排水接驳口、109-电源接口、200-操作面板、201-旋钮开关、202-触摸显示屏、205-入水口、206-出水口、207-按摩头、208-按摩单元、209-足浴机构、211-高压水泵、212-分水器、214-连接管路、215-加热器、216-循环泵、217-温度传感器、218-水位传感器、219-动态清洗电机、220-底盘机构、221-麦克纳姆轮、222-接驳激光传感器、223-机器人接驳端子、224-机器人机体排水口、225-锂电池组、230-前接触传感器、231-侧接触传感器、232-激光雷达传感器、233-动态高压喷嘴、234-静态高压喷嘴、235-微型计算机控制器。
具体实施方式
为使本发明更明显易懂,兹以优选实施例,并配合附图作详细说明如下。
如图1至图5所示,本发明一种智能足浴机器人包括足浴机器人机体210、与足浴机器人机体210接驳的综合接驳充电桩101。
足浴机器人机体210由机壳、操作面板200、足浴机构209、底盘机构220和微型计算机控制器235等部分构成。机壳上部与操作面板200通过紧固件连接,下部与底盘机构220通过紧固件连接,操作面板200与底盘机构220之间设置有足浴机构209,足浴机构209上部与操作面板200通过紧固件相连,其下部与底盘机构220通过紧固件相连,组成完整的足浴机器人机体210。
足浴机器人机体210为中空腔体结构,其内部还设置有相连的高压水泵211、循环泵216、加热器215、温度传感器217、水位传感器218、微型计算机控制器235、锂电池组225。
操作面板200设置有便于操作的旋钮开关201、触控开关和便于操作的触摸显示屏202,与微型计算机控制器235相连用以实现各个设备的控制。
足浴机构209为方形中空盆状结构体,盆体上沿向外延申与操作面板200相连,下端与底盘机构220通过紧固件连接形成盆体的支撑。足浴机构209的上口边沿设置有固定的静态高压喷嘴234和动态高压喷嘴233用于冲洗清洁盆体。足浴机构209的底部设置有多个可上下往复运动的按摩单元208用于脚底穴位的锤击按摩,通过程序设置可设定按摩区域和锤击的力度及锤击的方式。足浴机构209设置有用于水循环的循环水输入口和循环水输出口,以及电控的排水装置。
底盘机构220装有四个全向驱动单元用于移动,前部和左右两侧设置有前接触传感器230和侧接触传感器231用于行进过程中碰撞保护,前部中间区域配置有激光雷达传感器232用于绘制地图和检测空间坐标和障碍,后部中间区域设置有视觉传感器和红外传感器用于和综合接驳充电桩101的对接检测,后部下方设置有与综合接驳充电桩101对接的充电端子和机器人机体排水口224。
激光雷达传感器232位于底盘机构220前部中间位置,激光雷达传感器232实时对周围环境进行检测从而获得周围环境的轮廓图,使足浴机器人在初次运行环境进行地图建立,在后续自主运行过程中实时检测准确定位。
全向驱动单元,驱动轮采用麦克纳姆轮221作为输出轮,采用全向驱动技术,加之麦克纳姆轮221的独特运行方式可实现任意方向的平移及在原地旋转,具体的行进方式为直行、斜行、横行、S形行进和零半径任意角度旋转等。
高压水泵211为直流电机驱动的增压水泵,入口将水吸入将水压提高后由输出口排出,高压水泵的进水口与足浴机构209的入水口205通过连接管路214连接,排水口与足浴机构209的高压出水口206通过连接管路214连接,在足浴机构209的高压出水口206产生较高的水压用于盆体的冲洗。
循环泵216通过连接管路214连接足浴机构209的入水口205和出水口206,用于足浴机构209的水循环。
温度传感器217嵌入在循环泵216的入水管路中,用于准确测量来自足浴盆水循环输出口的水温。
水位传感器218用于检测中足浴盆内部的水位高度。
微型计算机控制器235包括有运算器、控制器、存储器、输入输出IO端口、通讯端口、电源处理电路、电机驱动电路,水泵控制电路、加热器控制电路。
微型计算机控制器235是足浴机器人机体210的主要控制部件,与高压水泵211、循环泵216、加热器215、温度传感器217、水位传感器218、电路板、锂电池组225、底盘机构220以及操作面板200连接。微型计算机控制器235通讯端口接收激光雷达传感器232、温度传感器217和水位传感器218的数据信息,水泵控制电路控制高压水泵211、循环泵216的工作与停止,加热器控制电路控制加热器215的加热功率和停止,电机驱动电路与驱动单元连接,用于驱动麦克纳姆轮221运动。
锂电池组225由多节锂离子电池串联组成,与微型计算机控制器235相连,用于足浴机器人机体210的供电。
综合接驳充电桩101落地靠墙安装,综合接驳充电桩101具有冷水接口105和热水接口106,通过管路与自来水管道连接;具有排水接口107通过管道与地漏或排水管道连接;具有为足浴机器人充电的裸露充电桩接驳端子102,端子供电为直流24V以下的安全电压。
本发明通过设定智能足浴机器人的使用时间和房间内的使用位置,到达设定时间后足浴机器人自主完成接水和加温流程,之后与综合接驳充电桩101脱离移动到预设的位置,移动过程可实现自主精确定位移动、自动规避障碍和自动规划路线,到达预设位置后对足浴盆内的水进行循环加热,保持水温在设定的温度等待使用者足浴,足浴机器人检测到使用者脚进入盆体后足浴机构209开始工作,足底按摩单元208可根据程序的预先设定进入足底按摩流程,按摩过程中对足底穴位进行锤击按摩,按摩的穴位和脚掌区域可根据个人的喜好设定,足浴结束后组与机器人自主移动回到综合接驳充电桩101进行充电、排水和自清洗工作。如图6和图7所示,本发明共有两种工作模式:
工作模式1
足浴机器人在不工作的时候处于静默待机状态,当接收到使用者发出的召唤指令后系统被激活进入工作状态,综合接驳充电桩101工作状态也被激活。
综合充电桩向足浴机构209盆体注入来自水网的自来水,水经过综合接驳充电桩101内部的即热装置进行升温后变成温水,随即注入足浴机器人的足浴机构209,水位传感器218检测注水量达到设定值时停止注水。
注水完成后的足浴机器人在底盘机构220的麦克纳姆轮221驱动下与综合接驳充电桩101脱离,自行移动到使用者所设定的的坐标位置。在移动过程中足浴机器人的激光雷达传感器232和碰撞传感器全程处于工作状态,激光雷达在足浴机器人行进过程中实时的扫描周围环境,保证移动的路径能够规避房间内的固定障碍物,当行进过程中扫描到有障碍物出现在行进路径影响行进时,机器人将自动绕过障碍物行进。行进过程中如果遇到动物宠物或人突然出现挡住行进路径机器人将停止行进并重新自动规划绕行路线,如果动物撞到行进中的足浴机器人,足浴机器人的碰撞传感器被触发,足浴机器人立即停止行进以保护动物和自身的安全,停止后机器人会反向行进脱离接触区域后重新自动规划目的地行进路径,直到抵达使用者设定的使用点坐标位置。
当足浴机器人到达使用者设定坐标位置后自动调整好方向并对足浴机构209内的水进行加热保温待使用者使用。
使用者的脚伸到到足浴机构209进行足浴,检测到脚伸入后按摩单元208的按摩头207开始对使用者足底进行锤击按摩,足底锤击区域和锤击模式、按摩和足浴时间可在操作面板200的触摸显示屏202上进行选择、设定,足浴过程温度传感器217检测实现水温保持恒定,足底穴位得到恰当按摩促进了足部血液循环达到健康养生的目的。
足浴结束后足浴机器人自主设定行进路径后回到综合接驳充电桩101位置,足浴机器人与综合接驳充电桩101通过激光定位准确的进行精准定位接驳,接驳到位后通过充电桩接驳端子102为足浴机器人进行供电。足浴机器人的机器人机体排水口224与综合接驳充电桩101的排水接驳口108对接,足浴机器人将废水通过综合接驳充电桩101的排水接口107排入下水管道。
完成排水后,综合接驳充电桩101再次对足浴机器人进行注水,足浴机器人开始自主清洗工作,足浴机器人的静态高压喷嘴234喷射出的水对足浴机构209的内壁进行冲洗,动态高压喷嘴233喷射出的水对足浴机构209底部按摩单元208进行冲洗,冲洗过程中产生的废水直接通过综合接驳充电桩101的排水接口107排入下水管道。
完成自动清洗后,足浴机器人进入充电模式,直到足浴机器人内部的锂电池组225完成充电后整机进入静默待机模式。
工作模式2
足浴机器人在不工作的时候处于静默待机状态,达到使用者预先设定的使用时间后系统被激活进入到工作状态,综合接驳充电桩101工作状态也被激活。
综合接驳充电桩101具有热水接口106,与外部热水器相连,综合充电桩向足浴机构209盆体注入来外部热水器的温水,温水注入足浴机器人的足浴机构209,注水量达到设定值时停止注水。
注水完成的足浴机器人在底盘机构220的麦克纳姆轮221驱动下与综合接驳充电桩101脱离,自行移动到使用者预设的坐标位置,在移动过程中足浴机器人的激光雷达传感器232和碰撞传感器全程处于工作状态,激光雷达在足浴机器人行进过程中实时的扫描周围环境,保证移动的路径能够规避房间内的固定障碍物。当行进过程中扫描到有障碍物出现在行进路径影响行进时,机器人将自动绕过障碍物行进。行进过程中如果遇到动物宠物或人突然出现挡住行进路径机器人将停止行进并重新自动规划绕行路线,如果动物撞到行进中的足浴机器人,足浴机器人的碰撞传感器被触发,足浴机器人立即停止行进以保护动物和自身的安全,停止后机器人会反向行进脱离接触区域后重新自动规划目的地行进路径,直到抵达使用者设定的使用点坐标位置。
当足浴机器人到达使用者预设的坐标位置后自动调整好方向并对足浴机构209内的水进行加热保温待使用者使用。
使用者的脚伸到到足浴机构209进行足浴,检测到脚伸入后足浴机构209根据预设程序进行工作,根据预设程序设定的足浴时长和锤击模式对足底穴位进行锤击按摩,足底穴位得到恰当按摩促进了足部血液循环达到健康养生的目的。
足浴结束后足浴机器人自主设定行进路径后回到综合接驳充电桩101位置,足浴机器人上安装接驳激光发射器103,综合接驳充电桩101上设置接驳激光传感器222,足浴机器人与综合接驳充电桩101通过激光定位准确的进行精准定位接驳,接驳到位后通过接驳端子为足浴机器人进行供电。足浴机器人的机器人机体排水口224与综合接驳充电桩101的排水接驳口108对接,足浴机器人将废水通过综合接驳充电桩101的排水接口107排入下水管道。
完成排水后,综合接驳充电桩101再次对足浴机器人进行注水,足浴机器人开始自主清洗工作,足浴机器人的静态高压喷嘴234喷射出的水对足浴机构209的内壁进行冲洗,动态高压喷嘴233喷射出的水对足浴机构209底部按摩单元208进行冲洗,冲洗过程中产生的废水直接通过综合接驳充电桩101的排水接口107排入下水管道。
- 一种智能足浴机器人
- 一种自动足浴机器人