一种迈步式锚固装备安全连锁系统及其控制方法
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及综掘工作面掘、锚、支装备协同作业保护装置及方法,具体涉及一种迈步式锚固装备安全连锁系统及其控制方法。
背景技术
目前“采掘失调”已成为国内煤炭开采过程中普遍存在的问题,严重制约采煤的速度与效率。为此,众多科研院所、企业研发具有掘、锚、支多功能协同作业的装备。但由于掘进机体积庞大,占据掘进巷道地面的大部分空间,传统锚、支、护装备集成于掘进机顶部。该类装备锚固作业受限于掘进机,难以充分发挥各个工序装备的性能,并未从根本上解决掘、锚、支不协调等问题。为此,多种门式结构的锚、支、护、运装备孕育而生,具有代表的专利有“CN202010847475.X”、“CN202010392056.1”、“CN201910275708.0”、“CN201721580492.1”。本课题组研发的协同掘进机作业的迈步式锚支护装备有“CN202010040881.5”、“CN202010491944.9”、“CN202011087963.1”。以上专利的锚、支、护装备与掘进机采用门式分离的结构,可以实现锚、支、护装备与掘进机最大程度的协同作业。但是,由于采掘工作面环境复杂、粉尘较大、能见度较差,锚、支、护装备内部有掘进机穿越,装备在行进和转弯过程中极易与掘进机或其他外部装备、人员发生碰撞。而上述专利方案中的锚、支、护装备均未有防碰撞以及防误动作的安全保护系统,存在对其他装备、人员造成损害的风险,给煤矿安全生产带来极大安全隐患。
发明内容
本发明的目的是提供一种迈步式锚固装备安全连锁系统及其控制方法,该安全连锁系统可靠性高、稳定性和适应性强、便于操作,为上述背景技术提供解决方案。
本发明所要解决的技术问题采用以下技术方案来实现:
一种迈步式锚固装备安全连锁系统及其控制方法,包含超前支护系统、锚固系统、迈步式锚固装备主行走支撑系统、迈步式锚固装备旋转系统、迈步式锚固装备激光雷达监测系统;所述超前支护系统安装在所述迈步式锚固装备主行走支撑系统的滑槽上;所述锚固系统通过螺栓安装在所述迈步式锚固装备主行走支撑系统前端;所述迈步式锚固装备旋转系统通过螺栓安装在所述迈步式锚固装备主行走支撑系统前后支腿中间,其特征是可在所述迈步式锚固装备主行走支撑系统上滑动,与所述迈步式锚固装备主行走支撑系统交替迈步动作,实现总装备的前后移动动作,且可实现总装备的调向转动动作;所述迈步式锚固装备激光雷达监测系统分布安装在所述超前支护系统、所述锚固系统、所述迈步式锚固装备主行走支撑系统、所述迈步式锚固装备旋转系统上,其特征是监测各个子系统运动过程中与人员、装备、障碍物之间的距离。
所述超前支护系统由超前支护系统作业组件和超前支护系统推进液压缸组组成;所述超前支护系统作业组件的滑槽镶嵌于所述迈步式锚固装备主行走支撑系统的滑槽中;所述超前支护系统推进液压缸组一端与所述超前支护系统作业组件通过螺栓相连,另一端通过螺栓固定在所述迈步式锚固装备主行走支撑系统的滑槽导轨上。
所述锚固系统由锚固系统作业组件和锚固系统推进液压缸组组成;所述锚固系统推进液压缸组一端与所述锚固系统作业组件通过螺栓连接,另一端通过螺栓固定在所述迈步式锚固装备主行走支撑系统前端支撑板上。
所述迈步式锚固装备旋转系统由迈步式锚固装备旋转系统推进液压缸组、迈步式锚固装备旋转系统组件、迈步式锚固装备旋转系统转动驱动液压缸组组成;所述迈步式锚固装备旋转系统推进液压缸组一端通过螺栓与所述迈步式锚固装备旋转系统组件连接,另一端通过螺栓固定在所述迈步式锚固装备主行走支撑系统后端支撑板上,所述迈步式锚固装备旋转系统转动驱动液压缸组通过螺栓安装在迈步式锚固装备旋转系统组件中的回转平台上。
所述迈步式锚固装备激光雷达监测系统包括超前支护系统与锚固系统激光监测雷达、迈步式锚固装备主行走支撑系统前侧激光监测雷达、迈步式锚固装备旋转系统激光监测雷达、迈步式锚固装备主行走支撑系统后侧激光监测雷达;所述超前支护系统与锚固系统激光监测雷达安装在所述锚固系统中的锚杆钻机平台底板上,其特征在于监测所述超前支护系统和所述锚固系统在运动过程中与人员、装备、障碍物之间的距离;所述迈步式锚固装备主行走支撑系统前侧激光监测雷达和所述迈步式锚固装备主行走支撑系统后侧激光监测雷达分别安装在所述迈步式锚固装备主行走支撑系统前后支撑板上,其特征在于监测所述迈步式锚固装备主行走支撑系统在运动过程中与人员、装备、障碍物之间的距离;所述迈步式锚固装备旋转系统激光监测雷达安装在所述迈步式锚固装备旋转系统中液压泵站支座的两侧面;其特征在于监测所述迈步式锚固装备旋转系统在前后移动和旋转过程中与人员、装备、障碍物之间的距离。
一种迈步式锚固装备安全连锁系统及其控制方法,安全连锁控制过程,其特征包括以下步骤:
S1:对迈步式锚固装备安全连锁系统进行初始化;
S2:对迈步式锚固装备总安全连锁系统闭锁判断,若未闭锁直接进入故障报错,停止运行状态;
S3:迈步式锚固装备总安全连锁系统闭锁,对超前支护安全连锁系统闭锁判断,若未闭锁直接进入故障报错,停止运行状态;
S4:超前支护安全连锁系统闭锁,对锚固装备安全连锁系统闭锁判断,若未闭锁直接进入故障报错,停止运行状态;
S5:锚固装备安全连锁系统闭锁,对主行走支撑系统闭锁判断,若未闭锁直接进入故障报错,停止运行状态;
S6:主行走支撑系统闭锁,对旋转系统闭锁判断,若未闭锁直接进入故障报错,停止运行状态;
S7:旋转系统闭锁,迈步式锚固装备正常运行。
由于所述超前支护系统、所述锚固系统、所述迈步式锚固装备主行走支撑系统、所述迈步式锚固装备旋转系统的安全连锁系统控制方法类似,本发明以所述迈步式锚固装备旋转系统的安全连锁系统控制方法进行叙述,步骤如下:
S1:所述迈步式锚固装备旋转系统激光监测雷达所测数据经ADC转换模块转换为数字信号;
S2:逻辑控制电路与ADC转换模块相连,接收激光监测雷达所测数据,同时与设定的装备允许安全距离值一起进行放大、滤波、逻辑判断处理;
S3:安全系统逻辑模块接收S2中的输出结果;
S4:同时,所述迈步式锚固装备旋转系统转动驱动液压缸组通过其位移传感器经ADC转换模块将数据传输到泵阀联控系统的逻辑控制电路中;
S5:所述迈步式锚固装备旋转系统转动驱动液压缸组通过其位移传感器经ADC转换模块将数据同时传输至泵阀联控单元;泵阀联控单元通过自适应控制算法,将控制信号分别传递到液压多路电磁阀控系统和永磁同步电机变频驱动系统进行实时动态控制;
S6:泵阀联控单元中运动期望模块根据所述迈步式锚固装备路径规划策略实时更新运动期望数值,并将数据传输到泵阀联控系统的逻辑控制电路中;
S7:泵阀逻辑控制电路将接收到的S4和S6中信号进行放大、滤波、逻辑判断处理;并传输至安全系统逻辑模块;
S8:安全系统逻辑模块判断S3和S7中输入信息,若任何一路信息超过系统安全阈值,则立即断开永磁同步电机及其控制系统电源,并启动故障报警模式;若S3和S7中输入信息均未超过系统安全阈值,锚固装备正常工作;
S9:迈步式锚固装备旋转系统的安全连锁系统重复S1-S8步骤工作。
本发明的有益效果是:
通过建立迈步式锚固装备安全连锁系统,利用迈步式锚固装备激光雷达监测系统实时监测各个子系统运动过程中与人员、装备、障碍物之间的距离,并通过ADC转换模块将数据输入逻辑控制电路中与设定阈值进行分析比较,安全系统逻辑模块根据逻辑控制电路输入信息决定锚固装备是否正常运行,从而避免该装备与其他装备、人员发生碰撞等事故的发生。同时,该装备的安全连锁系统对锚固装备中的泵阀联控系统进行保护,防止设备发生误动作或误操作,从而提高装备的稳定性与安全性。
附图说明
图1为迈步式锚固装备与掘进机协同作业示意图;
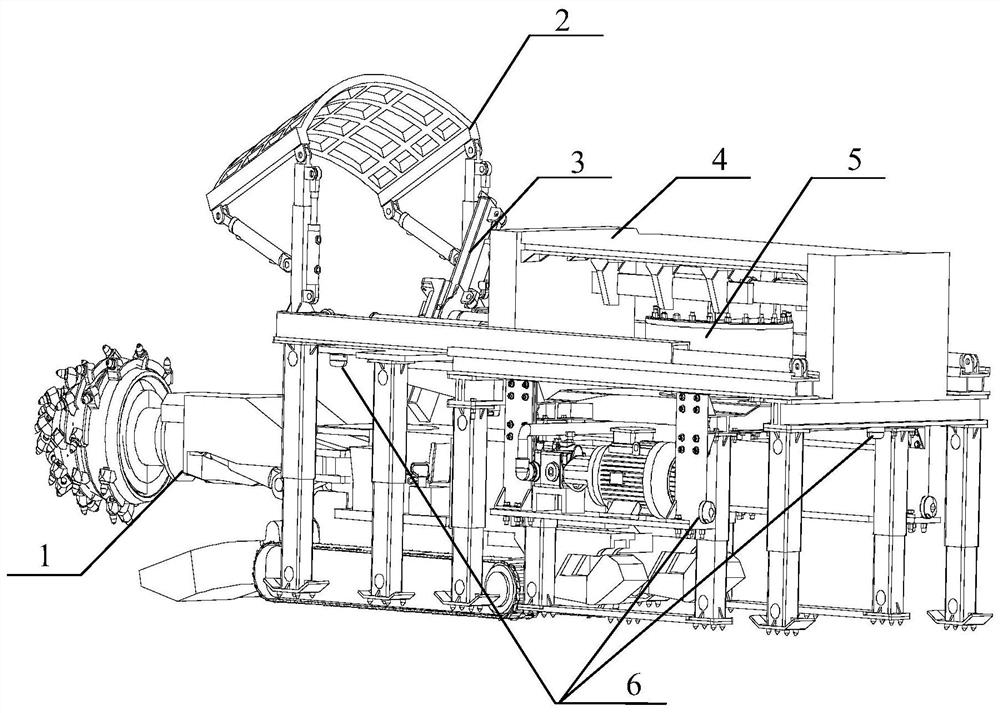
图2为迈步式锚固装备结构示意图;
图3为迈步式锚固装备旋转系统局部示意图;
图4为迈步式锚固装备安全连锁传感器位置布置示意图;
图5为迈步式锚固装备安全连锁控制方法流程图;
图6为迈步式锚固装备安全连锁的一个实施例原理图。
图中各标号表示为:1.掘进机;2.超前支护系统;2-1.超前支护系统作业组件;2-2.超前支护系统推进液压缸组;3.锚固系统;3-1.锚固系统作业组件;3-2.锚固系统推进液压缸组;4.迈步式锚固装备主行走支撑系统;5.迈步式锚固装备旋转系统;5-1.迈步式锚固装备旋转系统推进液压缸组;5-2.迈步式锚固装备旋转系统组件;5-3.迈步式锚固装备旋转系统转动驱动液压缸组;6.迈步式锚固装备激光雷达监测系统;6-1.超前支护系统与锚固系统激光监测雷达;6-2.迈步式锚固装备主行走支撑系统前侧激光监测雷达;6-3.迈步式锚固装备旋转系统激光监测雷达;6-4.迈步式锚固装备主行走支撑系统后侧激光监测雷达。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合附图和具体实施方式对本发明作进一步详细描述。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
参见图1、图2,一种迈步式锚固装备安全连锁系统及其控制方法,包含超前支护系统2、锚固系统3、迈步式锚固装备主行走支撑系统4、迈步式锚固装备旋转系统5、迈步式锚固装备激光雷达监测系统6;所述超前支护系统2安装在所述迈步式锚固装备主行走支撑系统4的滑槽上;所述锚固系统3通过螺栓安装在所述迈步式锚固装备主行走支撑系统4前端;所述迈步式锚固装备旋转系统5通过螺栓安装在所述迈步式锚固装备主行走支撑系统4前后支腿中间,其特征是可在所述迈步式锚固装备主行走支撑系统4上滑动,与所述迈步式锚固装备主行走支撑系统4交替迈步动作,实现总装备的前后移动动作,且可实现总装备的调向转动动作;所述迈步式锚固装备激光雷达监测系统6分布安装在所述超前支护系统2、所述锚固系统3、所述迈步式锚固装备主行走支撑系统4、所述迈步式锚固装备旋转系统5上,其特征是监测各个子系统运动过程中与人员、装备、障碍物之间的距离。
参见图1、图2,所述超前支护系统2由超前支护系统作业组件2-1和超前支护系统推进液压缸组2-2组成;所述超前支护系统作业组件2-1的滑槽镶嵌于所述迈步式锚固装备主行走支撑系统4的滑槽中;所述超前支护系统推进液压缸组2-2一端与所述超前支护系统作业组件2-1通过螺栓相连,另一端通过螺栓固定在所述迈步式锚固装备主行走支撑系统4的滑槽导轨上。
参见图1、图2,所述锚固系统3由锚固系统作业组件3-1和锚固系统推进液压缸组3-2组成;所述锚固系统推进液压缸组3-2一端与所述锚固系统作业组件3-1通过螺栓连接,另一端通过螺栓固定在所述迈步式锚固装备主行走支撑系统4前端支撑板上。
参见图2、图3,所述迈步式锚固装备旋转系统5由迈步式锚固装备旋转系统推进液压缸组5-1、迈步式锚固装备旋转系统组件5-2、迈步式锚固装备旋转系统转动驱动液压缸组5-3组成;所述迈步式锚固装备旋转系统推进液压缸组5-1一端通过螺栓与所述迈步式锚固装备旋转系统组件5-2连接,另一端通过螺栓固定在所述迈步式锚固装备主行走支撑系统4后端支撑板上,所述迈步式锚固装备旋转系统转动驱动液压缸组5-3通过螺栓安装在迈步式锚固装备旋转系统组件5-2中的回转平台上。
参见图1、图4,所述迈步式锚固装备激光雷达监测系统6包括超前支护系统与锚固系统激光监测雷达6-1、迈步式锚固装备主行走支撑系统前侧激光监测雷达6-2、迈步式锚固装备旋转系统激光监测雷达6-3、迈步式锚固装备主行走支撑系统后侧激光监测雷达6-4;所述超前支护系统与锚固系统激光监测雷达6-1安装在所述锚固系统3中的锚杆钻机平台底板上,其特征在于监测所述超前支护系统2和所述锚固系统3在运动过程中与人员、装备、障碍物之间的距离;所述迈步式锚固装备主行走支撑系统前侧激光监测雷达6-2和所述迈步式锚固装备主行走支撑系统后侧激光监测雷达6-4分别安装在所述迈步式锚固装备主行走支撑系统4前后支撑板上,其特征在于监测所述迈步式锚固装备主行走支撑系统4在运动过程中与人员、装备、障碍物之间的距离;所述迈步式锚固装备旋转系统激光监测雷达6-3安装在所述迈步式锚固装备旋转系统5中液压泵站支座的两侧面;其特征在于监测所述迈步式锚固装备旋转系统5在前后移动和旋转过程中与人员、装备、障碍物之间的距离。
参见图5,一种迈步式锚固装备安全连锁系统及其控制方法,安全连锁控制过程特征包括以下步骤:
S1:对迈步式锚固装备安全连锁系统进行初始化;
S2:对迈步式锚固装备总安全连锁系统闭锁判断,若未闭锁直接进入故障报错,停止运行状态;
S3:迈步式锚固装备总安全连锁系统闭锁,对超前支护安全连锁系统闭锁判断,若未闭锁直接进入故障报错,停止运行状态;
S4:超前支护安全连锁系统闭锁,对锚固装备安全连锁系统闭锁判断,若未闭锁直接进入故障报错,停止运行状态;
S5:锚固装备安全连锁系统闭锁,对主行走支撑系统闭锁判断,若未闭锁直接进入故障报错,停止运行状态;
S6:主行走支撑系统闭锁,对旋转系统闭锁判断,若未闭锁直接进入故障报错,停止运行状态;
S7:旋转系统闭锁,迈步式锚固装备正常运行。
参见图6,由于所述超前支护系统2、所述锚固系统3、所述迈步式锚固装备主行走支撑系统、所述迈步式锚固装备旋转系统5的安全连锁系统控制方法类似,本发明以所述迈步式锚固装备旋转系统5的安全连锁系统控制方法进行叙述,步骤如下:
S1:所述迈步式锚固装备旋转系统激光监测雷达6-3所测数据经ADC转换模块转换为数字信号;
S2:逻辑控制电路与ADC转换模块相连,接收激光监测雷达所测数据,同时与设定的装备允许安全距离值一起进行放大、滤波、逻辑判断处理;
S3:安全系统逻辑模块接收S2中的输出结果;
S4:同时,所述迈步式锚固装备旋转系统转动驱动液压缸组5-3通过其位移传感器经ADC转换模块将数据传输到泵阀联控系统的逻辑控制电路中;
S5:所述迈步式锚固装备旋转系统转动驱动液压缸组5-3通过其位移传感器经ADC转换模块将数据同时传输至泵阀联控单元;泵阀联控单元通过自适应控制算法,将控制信号分别传递到液压多路电磁阀控系统和永磁同步电机变频驱动系统进行实时动态控制;
S6:泵阀联控单元中运动期望模块根据所述迈步式锚固装备路径规划策略实时更新运动期望数值,并将数据传输到泵阀联控系统的逻辑控制电路中;
S7:泵阀逻辑控制电路将接收到的S4和S6中信号进行放大、滤波、逻辑判断处理;并传输至安全系统逻辑模块;
S8:安全系统逻辑模块判断S3和S7中的输入信息,若任何一路信息超过系统安全阈值,则立即断开永磁同步电机及其控制系统电源,并启动故障报警模式;若S3和S7输入信息均未超过系统安全阈值,锚固装备正常工作;
S9:迈步式锚固装备旋转系统5的安全连锁系统重复S1-S8步骤工作。
- 一种迈步式锚固装备安全连锁系统及其控制方法
- 一种迈步自移式临时支护装备及其支护方法