云台的控制方法、装置、云台及计算机可读存储介质
文献发布时间:2023-06-19 12:14:58
技术领域
本申请涉及云台技术领域,尤其涉及一种云台的控制方法、装置、云台及计算机可读存储介质。
背景技术
现今,通过在云台上加载相机等拍摄装置进行拍摄,已经被广泛应用于航拍、巡检等各个领域。为了实现拍摄装置在下雨或水下等环境中也能拍摄,云台设置有相应的防护壳,实现防水、防尘功能。目前,在拍摄过程中,一般是基于云台的关节角约束控制云台旋转,进而带动拍摄装置拍摄不同视场角的图像。由于拍摄装置对应的平面与防护壳对应的平面存在不同倾角,在基于关节角约束控制云台旋转进行拍摄时,拍摄出来的图像中很可能就会出现防护壳,从而导致拍摄的图像作废。
因此,如何提高云台旋转控制的可靠性,进而提高拍摄装置拍摄图像的效率成为亟待解决的问题。
发明内容
基于此,本申请提供了一种云台的控制方法、装置、云台及计算机可读存储介质,以实现提高云台旋转控制的可靠性,进而提高拍摄装置拍摄图像的效率。
第一方面,本申请实施例提供了一种云台的控制方法,所述云台包括防护壳,所述方法包括:
获取云台的测量姿态,以及获取所述云台的上一时刻期望姿态;
基于所述测量姿态,确定所述云台的基座姿态;
根据所述基座姿态,以及所述上一时刻期望姿态,确定所述云台基于平面约束调节姿态对应的旋转轴和旋转角度;
根据所述旋转轴、所述旋转角度、以及所述上一时刻期望姿态,确定所述云台的当前时刻期望姿态;
根据所述当前时刻期望姿态,控制所述云台旋转,以使所述云台上装载的拍摄装置对应的视野中不含所述防护壳。
第二方面,本申请实施例还提供了一种云台的控制装置,所述云台的控制装置包括存储器和处理器;
所述存储器用于存储计算机程序;
所述处理器,用于执行所述计算机程序并在执行所述计算机程序时,实现如下步骤:
获取云台的测量姿态,以及获取所述云台的上一时刻期望姿态;
基于所述测量姿态,确定所述云台的基座姿态;
根据所述基座姿态,以及所述上一时刻期望姿态,确定所述云台基于平面约束调节姿态对应的旋转轴和旋转角度;
根据所述旋转轴、所述旋转角度、以及所述上一时刻期望姿态,确定所述云台的当前时刻期望姿态;
根据所述当前时刻期望姿态,控制所述云台旋转,以使所述云台上装载的拍摄装置对应的视野中不含所述防护壳。
第三方面,本申请实施例还提供了一种云台,所述云台包括防护壳和如上述的云台的控制装置;其中,所述防护壳用于装载拍摄装置,所述云台的控制装置用于控制所述云台旋转。
第四方面,本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现如上述的云台的控制方法。
本申请实施例公开的云台的控制方法、装置、云台及计算机可读存储介质,通过获取云台的测量姿态、以及云台的上一时刻期望姿态,基于测量姿态确定云台的基座姿态,根据基座姿态以及上一时刻期望姿态,确定云台基于平面约束调节姿态对应的旋转轴和旋转角度,进而获得云台的当前时刻期望姿态,根据云台的当前时刻期望姿态控制云台旋转,使得云台上装载的拍摄装置对应的视野中不出现防护壳,提高了云台旋转控制的可靠性,避免了由于拍摄装置拍摄的图像中包含防护壳而导致图像作废的情况出现,进而提高了拍摄装置拍摄图像的效率。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
附图说明
为了更清楚地说明本申请实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本申请的实施例提供的一种云台的结构示意图;
图2是本申请的实施例提供的一种防护壳的结构示意图;
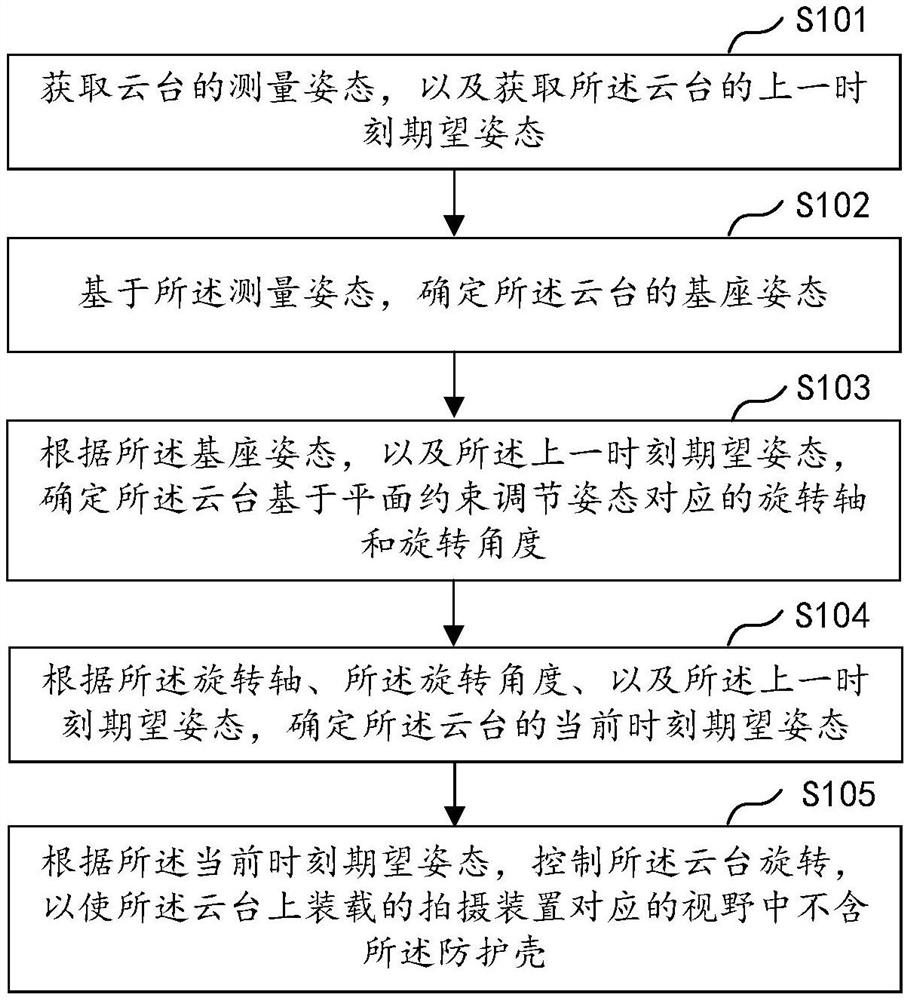
图3是本申请的实施例提供的一种云台的控制方法的步骤示意流程图;
图4是图3中步骤S102的细化步骤示意流程图;
图5是图3中步骤S103的细化步骤示意流程图;
图6是本申请的实施例提供的一种云台的控制装置的示意性框图。
具体实施方式
下面对本申请的实施例进行介绍。
附图中所示的流程图仅是示例说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解、组合或部分合并,因此实际执行的顺序有可能根据实际情况改变。
应当理解,在此本申请说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本申请。如在本申请说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。本申请中,“至少一个”是指一个或者多个,“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,同时存在A和B,单独存在B的情况,其中A,B可以是单数或者复数。字符“/”一般表示前后关联对象是一种“或”的关系。“以下至少一项(个)”或其类似表达,是指的这些项中的任意组合,包括单项(个)或复数项(个)的任意组合。例如,a,b,或c中的至少一项(个),可以表示:a,b,c,a和b,a和c,b和c,或a和b和c,其中a,b,c可以是单个,也可以是多个。
还应当进理解,在本申请说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
下面结合附图,对本申请的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
本申请的实施例提供了一种云台的控制方法、装置、云台及计算机可读存储介质,用于实现提高云台旋转控制的可靠性,进而提高拍摄装置拍摄图像的效率。
其中,云台包括但不限于手持云台、无人机云台等,当然,云台也可以是其他类型的云台或可移动装置,本申请实施例不限于此。
请参阅图1,图1为本申请实施例提供的一种云台的结构示意图。如图1所示,云台100包括云台本体10、防护壳20、以及设置于云台本体10内的云台的控制装置(图中未示出)。其中,防护壳20内装载拍摄装置30,拍摄装置30包括但不限于摄像头、相机等。云台的控制装置用于控制云台100旋转,具体用于控制云台本体10及拍摄装置30旋转。
示例性的,如图2所示,防护壳20包括壳体21和罩组件22,壳体21的一端设置有与罩组件22的罩口形状适配的开口,开口与罩口相互抵接,且壳体21与罩组件22能够互相锁紧形成密闭腔,腔内提供有云台本体10和拍摄装置30的活动空间。
在一些实施例中,云台本体10可以包括云台臂或者手持臂,防护壳20的密闭腔可与云台本体10的形状相适配,比如对于云台本体10包括手持臂的情形,防护壳20的密闭腔可对应构造有手持臂的容纳空间。
在一些实施例中,如图2所示,防护壳20还可包括紧固件23,壳体21和罩组件22可通过紧固件23互相锁紧。当然,在一些实施例中,紧固件23也可以与壳体21或者罩组件22为一体结构,即紧固件23可以是壳体21和罩组件22中的一个上设置的紧固部,同时另一个上设置与紧固部配合的紧固配合部,紧固部与紧固配合部配合实现壳体21和罩组件22的紧固连接,在具体方案中,紧固部和紧固配合部可对应于螺纹结构,或者对应于卡扣结构。
可以理解的,上述对于云台100各部件的命名仅仅出于标识的目的,并不因此对本申请实施例进行限制。
以下,将结合图1中的云台100以及图2中的防护壳20对本申请的实施例提供的云台的控制方法进行详细介绍。需知,图1中的云台100以及图2中的防护壳20仅用于解释本申请实施例提供的云台的控制方法,但并不构成对本申请实施例提供的云台的控制方法应用场景的限定。
请参阅图3,图3是本申请的实施例提供的一种云台的控制方法的示意流程图。该方法可以用于上述云台中,通过云台的控制装置来执行,当然也可以由云台上携带的其它控制装置来实现,本申请实施例不限于此。
为了方便对本申请的实施例作详细阐述,以下以该方法应用于云台的控制装置为例进行说明,以实现提高云台旋转控制的可靠性,进而提高拍摄装置拍摄图像的效率。
具体地,如图3所示,该云台的控制方法具体包括步骤S101至步骤S105。
S101、获取云台的测量姿态,以及获取所述云台的上一时刻期望姿态。
相比于目前通常采用的基于云台的关节角约束控制云台旋转的云台控制方式,本申请实施例中,是基于云台平面约束控制云台旋转。具体地,首先获取云台的测量姿态q_atti_gimbal。示例性的,云台上设置有相应的惯性测量单元(Inertial measurementunit,IMU),惯性测量单元是测量物体三轴姿态角(或角速率)以及加速度的装置。其中,惯性测量单元包括但不限于陀螺仪、加速度计等装置。通过云台上设置的陀螺仪、加速度计等惯性测量单元检测获得云台的测量姿态q_atti_gimbal。
另一方面,除了获取到云台的测量姿态q_atti_gimbal以外,还获取云台的上一时刻期望姿态q_tar。示例性的,在控制云台旋转的过程中,记录云台的每个时刻期望姿态,通过查询记录获取到云台的上一时刻期望姿态q_tar。
S102、基于所述测量姿态,确定所述云台的基座姿态。
在获取到云台的测量姿态q_atti_gimbal后,根据云台的测量姿态q_atti_gimbal,以及云台的基座姿态q_atti_base与测量姿态q_atti_gimbal之间的关联性,计算出云台的基座姿态q_atti_base。
在一些实施例中,如图4所示,步骤S102具体可以包括子步骤S1021和子步骤S1022。
S1021、获取云台对应的多个关节角的转角。
以zxy构型云台为例,云台对应的多个关节角包括yaw关节角、roll关节角以及pitch关节角。其中,对于yaw关节角,yaw关节角对应的旋转轴为【0,0,1】,对于roll关节角,roll关节角对应的旋转轴为【1,0,0】,对于pitch关节角,pitch关节角对应的旋转轴为【0,1,0】。获取yaw关节角的转角joint_yaw_rad,roll关节角的转角joint_roll_rad、以及pitch关节角的转角joint_pitch_rad,转角joint_yaw_rad、joint_roll_rad、以及joint_pitch_rad的单位为弧度。可选地,通过惯性测量单元或者云台设上置的其他相应传感器检测装置检测获取yaw关节角、roll关节角、pitch关节角等多个关节角的转角joint_yaw_rad、joint_roll_rad、joint_pitch_rad。
S1022、根据所述多个关节角的转角,以及所述测量姿态,确定所述云台的所述基座姿态。
通过获得的joint_yaw_rad、joint_roll_rad、joint_pitch_rad多个转角,以及云台的测量姿态q_atti_gimbal,计算得到云台的基座姿态q_atti_base。
在一些实施例中,根据所述多个关节角的转角,以及所述测量姿态,确定所述云台的所述基座姿态可以包括:将所述多个关节角的转角,以及所述多个关节角对应的转轴,进行轴角向四元数转换计算,获得对应的多个关节角四元数;获取所述多个关节角四元数对应的逆四元数;基于基座姿态与测量姿态间的四元叉乘关系,根据所述多个关节角四元数对应的逆四元数、以及所述测量姿态,获得所述云台的所述基座姿态。
其中,轴角-四元数转换公式如下:
u表示旋转绕的单位轴,θ表示绕单位轴u旋转的角度,q表示绕单位轴u旋转θ角对应的四元数。
基于yaw关节角对应的旋转轴[0,0,1]和转角joint_yaw_rad,roll关节角对应的旋转轴[1,0,0]和转角joint_roll_rad,pitch关节角对应的旋转轴[0,1,0]和转角joint_pitch_rad,按照上述的轴角-四元数转换公式,进行轴角向四元数转换计算,获得转角joint_yaw_rad对应的关节角四元数为q_joint_yaw,转角joint_roll_rad对应的关节角四元数为q_joint_roll,转角joint_pitch_rad对应的关节角四元数为q_joint_pitch。
其中,四元数的逆运算公式如下:
q
基于所获得的关节角四元数q_joint_yaw、关节角四元数q_joint_roll、关节角四元数q_joint_pitch,按照上述四元数的逆运算公式,将关节角四元数q_joint_yaw、关节角四元数q_joint_roll、关节角四元数q_joint_pitch进行逆运算,获得关节角四元数q_joint_yaw对应的逆四元数inv_q_joint_yaw、关节角四元数q_joint_roll对应的逆四元数inv_q_joint_roll、关节角四元数q_joint_pitch对应的逆四元数inv_q_joint_pitch。
云台的基座姿态q_atti_base与云台的测量姿态q_atti_gimbal间具有四元叉乘关系:
q_atti_base*q_joint_yaw*q_joint_roll*q_joint_pitch=q_atti_gimbal
基于上述云台的基座姿态q_atti_base与云台的测量姿态q_atti_gimbal间的四元叉乘关系,以及所获得的逆四元数inv_q_joint_yaw、inv_q_joint_roll、inv_q_joint_pitch和云台的测量姿态q_atti_gimbal,反算得到云台的基座姿态q_atti_base为:
q_atti_base=q_atti_gimbal*inv_q_joint_pitch*inv_q_joint_roll*inv_q_joint_yaw
也即,将云台的测量姿态q_atti_gimba、关节角四元数q_joint_pitch对应的逆四元数inv_q_joint_pitch、关节角四元数q_joint_roll对应的逆四元数inv_q_joint_roll、关节角四元数q_joint_yaw对应的逆四元数inv_q_joint_yaw进行四元叉乘计算,获得云台的基座姿态q_atti_base。
S103、根据所述基座姿态,以及所述上一时刻期望姿态,确定所述云台基于平面约束调节姿态对应的旋转轴和旋转角度。
云台基于平面约束控制时对应有旋转相应的旋转轴和旋转角度,其中,旋转轴包括至少一个,相应地,基于旋转轴旋转对应的旋转角度也包括至少一个。通过计算获得云台的基座姿态q_atti_base、以及获得云台的上一时刻期望姿态q_tar,确定出云台基于平面约束调节姿态对应的至少一个旋转轴和至少一个旋转角度。
在一些实施例中,如图5所示,步骤S103具体可以包括子步骤S1031和子步骤S1032。
S1031、根据所述基座姿态和所述上一时刻期望姿态,获得基座相对云台的旋转姿态。
云台的基座姿态q_atti_base、云台的上一时刻期望姿态q_tar、以及基座相对云台的旋转姿态q_base2gimbal之间具有相应的四元叉乘关系,如下:
q_atti_base*q_base2gimbal=q_tar
根据云台的基座姿态q_atti_base,计算得到云台的基座姿态q_atti_base对应的逆四元数云台的基座姿态inv_q_atti_base,根据上述的四元叉乘关系反算得到基座相对云台的旋转姿态q_base2gimbal为:
q_base2gimbal=inv_q_atti_base*q_tar
S1032、根据所述基座相对云台的旋转姿态,确定所述云台基于平面约束调节姿态对应的所述旋转轴和所述旋转角度。
在一些实施例中,根据基座相对云台的旋转姿态,确定云台基于平面约束调节姿态对应的旋转轴和旋转角度可以包括:将所述基座相对云台的旋转姿态进行四元数向欧拉角转换计算,获得对应的多个欧拉角;将所述多个欧拉角进行轴角向四元数转换计算,获得对应的多个欧拉角四元数;根据所述多个欧拉角四元数,确定所述云台基于平面约束调节姿态对应的所述旋转轴和所述旋转角度。
其中,四元数q=(q0,q1,q2,q3)与欧拉角(α,β,γ)的转换公式如下:
基于该四元数与欧拉角的转换公式,将基座相对云台的旋转姿态q_base2gimbal进行四元数向欧拉角转换计算,获得对应的多个欧拉角。其中,欧拉角包括Euler_yaw_rad角、Euler_roll_rad角、Euler_pitch_rad角等。
Euler_yaw_rad角对应的旋转轴为【0,0,1】,Euler_roll_rad角对应的旋转轴为【1,0,0】,Euler_pitch_rad角对应的旋转轴为【0,1,0】,基于上文的轴角-四元数转换公式,将Euler_yaw_rad角进行轴角向四元数转换计算,获得Euler_yaw_rad角对应的欧拉角四元数为q_yaw;将Euler_roll_rad角进行轴角向四元数转换计算,获得Euler_roll_rad角对应的欧拉角四元数为q_roll;将Euler_pitch_rad角进行轴角向四元数转换计算,获得Euler_pitch_rad角对应的欧拉角四元数为q_pitch。
在一些实施例中,云台基于平面约束调节姿态对应的旋转轴包括两个:第一旋转轴和第二旋转轴,云台基于平面约束调节姿态对应的旋转角度包括绕第一旋转轴旋转对应的第一旋转角度、以及绕第二旋转轴旋转对应的第二旋转角度。
根据计算获得的欧拉角四元数q_roll和q_pitch,将q_roll和q_pitch进行四元叉乘计算,获得对应的面四元数q_xy为:
q_xy=q_roll*q_pitch
之后,将面四元数q_xy进行四元数向轴角转换计算,获得面四元数q_xy对应的转轴error_axis和转角error_angle_rad。该转轴error_axis确定为云台基于平面约束调节姿态对应的第一旋转轴,该转角error_angle_rad确定为云台基于平面约束调节姿态对应的绕第一旋转轴旋转的第一旋转角度。并且,将Euler_yaw_rad角对应的转轴【0,0,1】确定为云台基于平面约束调节姿态对应的第二旋转轴,将获得的Euler_yaw_rad角确定为云台基于平面约束调节姿态对应的第二旋转角度。
S104、根据所述旋转轴、所述旋转角度、以及所述上一时刻期望姿态,确定所述云台的当前时刻期望姿态。
由云台的上一时刻期望姿态q_tar,以及云台基于平面约束调节姿态对应的第一旋转轴error_axis、绕第一旋转轴error_axis旋转对应的第一旋转角度error_angle_rad,和云台基于平面约束调节姿态对应的第二旋转轴【0,0,1】、绕第二旋转轴【0,0,1】旋转对应的第二旋转角度Euler_yaw_rad,计算获得云台的当前时刻期望姿态Q_tar。
在一些实施例中,根据所述旋转轴、所述旋转角度、以及所述上一时刻期望姿态,确定所述云台的当前时刻期望姿态可以包括:将所述第一旋转角度和所述第一旋转轴进行轴角向四元数转换计算,获得对应的第一旋转角度四元数;将所述第二旋转角度和所述第二旋转轴进行轴角向四元数转换计算,获得对应的第二旋转角度四元数;根据所述第一旋转角度四元数、所述第二旋转角度四元数、以及所述上一时刻期望姿态,确定所述云台的所述当前时刻期望姿态。
按照上文的轴角-四元数转换公式,将云台基于平面约束调节姿态对应的第一旋转轴error_axis、绕第一旋转轴error_axis旋转对应的第一旋转角度error_angle_rad进行轴角向四元数转换计算,获得对应的第一旋转角度四元数q_tar_xy。以及,将云台基于平面约束调节姿态对应的第二旋转轴【0,0,1】、绕第二旋转轴【0,0,1】旋转对应的第二旋转角度Euler_yaw_rad进行轴角向四元数转换计算,获得对应的第二旋转角度四元数q_tar_yaw。之后,再根据计算获得的第一旋转角度四元数q_tar_xy、第二旋转角度四元数q_tar_yaw、以及云台的上一时刻期望姿态q_tar,基于云台相邻时刻期望姿态间的四元叉乘关系,计算获得云台的当前时刻期望姿态Q_tar。
在一些实施例中,为了确保拍摄装置对应平面与防护壳对应平面对齐或维持一定倾角,在获得第一旋转角度error_angle_rad和第二旋转角度Euler_yaw_rad后,先将第一旋转角度error_angle_rad和第二旋转角度Euler_yaw_rad进行调整,获得第一旋转角度error_angle_rad调整后对应的第一调整旋转角度tar_xy_spd_rps,以及第二旋转角度Euler_yaw_rad调整后对应的第二调整旋转角度error_spd_rps_raw。
在一些实施例中,通过将第一旋转角度error_angle_rad乘以第一系数,获得第一乘积值,将该第一乘积值确定为第一调整旋转角度tar_xy_spd_rps;以及,将第二旋转角度Euler_yaw_rad乘以第二系数,获得第二乘积值,将该第二乘积值确定为第二调整旋转角度error_spd_rps_raw。
示例性的,预先设置第一系数为k1、第二系数为k2,其中,第一系数k1和第二系数k2的具体数值可根据实际情况进行灵活设置,在此不作具体限制。计算获得第一调整旋转角度tar_xy_spd_rps为:
tar_xy_spd_rps=k1*error_angle_rad
计算获得第二调整旋转角度error_spd_rps_raw为:
error_spd_rps_raw=k2*Euler_yaw_rad
之后,再基于上文的轴角-四元数转换公式,将第一调整旋转角度tar_xy_spd_rps和第一旋转轴error_axis进行轴角向四元数转换计算,获得上述的第一旋转角度四元数q_tar_xy;将第二调整旋转角度error_spd_rps_raw和第二旋转轴【0,0,1】进行轴角向四元数转换计算,获得上述的第二旋转角度四元数q_tar_yaw。
在一些实施例中,根据所述第一旋转角度四元数、所述第二旋转角度四元数、以及所述上一时刻期望姿态,确定所述云台的所述当前时刻期望姿态可以包括:获取所述第一旋转角度四元数对应的逆四元数,以及所述第二旋转角度四元数对应的逆四元数;基于云台相邻时刻期望姿态间的四元叉乘关系,根据所述第一旋转角度四元数对应的逆四元数,所述第二旋转角度四元数对应的逆四元数、以及所述上一时刻期望姿态,获得所述当前时刻期望姿态。
在计算获得第一旋转角度四元数q_tar_xy和第二旋转角度四元数q_tar_yaw后,按照上文的四元数的逆运算公式,将第一旋转角度四元数q_tar_xy和第二旋转角度四元数q_tar_yaw进行逆运算,获得第一旋转角度四元数q_tar_xy对应的逆四元数inv_q_tar_xy,以及第二旋转角度四元数q_tar_yaw对应的逆四元数inv_q_tar_yaw。
云台相邻时刻期望姿态间具有四元叉乘关系:
Q_tar*q_tar_xy*q_tar_yaw=q_tar
基于上述的云台相邻时刻期望姿态间的四元叉乘关系,反算得到云台的当前时刻期望姿态Q_tar为:
Q_tar=q_tar*inv_q_tar_xy*inv_q_tar_yaw
也即,将第一旋转角度四元数q_tar_xy对应的逆四元数inv_q_tar_xy、第二旋转角度四元数q_tar_yaw对应的逆四元数inv_q_tar_yaw、以及云台的上一时刻期望姿态q_tar进行四元叉乘计算,获得云台的当前时刻期望姿态Q_tar。
S105、根据所述当前时刻期望姿态,控制所述云台旋转,以使所述云台上装载的拍摄装置对应的视野中不含所述防护壳。
由于云台的当前时刻期望姿态Q_tar是基于平面约束获得,在云台的控制过程中,根据云台的当前时刻期望姿态Q_tar控制云台旋转时,云台的防护壳不会遮挡到拍摄装置的视野,也即拍摄装置对应的视野中不会出现防护壳,因此,通过拍摄装置拍摄的图像中就不会包含防护壳,从而避免了拍摄装置拍摄的图像作废,提高了用户使用体验。
上述实施例通过获取云台的测量姿态、以及云台的上一时刻期望姿态,基于测量姿态确定云台的基座姿态,根据基座姿态以及上一时刻期望姿态,确定云台基于平面约束调节姿态对应的旋转轴和旋转角度,进而获得云台的当前时刻期望姿态,根据云台的当前时刻期望姿态控制云台旋转,使得云台上装载的拍摄装置对应的视野中不出现防护壳,提高了云台旋转控制的可靠性,避免了由于拍摄装置拍摄的图像中包含防护壳而导致图像作废的情况出现,进而提高了拍摄装置拍摄图像的效率。
请参阅图6,图6是本申请实施例提供的一种云台的控制装置的示意性框图。如图6所示,该云台的控制装置600包括处理器610和存储器620,处理器610和存储器620通过总线连接,该总线比如为I2C(Inter-integrated Circuit)总线。
具体地,处理器610可以是微控制单元(Micro-controller Unit,MCU)、中央处理单元(Central Processing Unit,CPU)或数字信号处理器(Digital Signal Processor,DSP)等。
具体地,存储器620可以是Flash芯片、只读存储器(ROM,Read-Only Memory)磁盘、光盘、U盘或移动硬盘等。
其中,所述处理器用于运行存储在存储器中的计算机程序,并在执行所述计算机程序时实现如下步骤:
获取云台的测量姿态,以及获取所述云台的上一时刻期望姿态;
基于所述测量姿态,确定所述云台的基座姿态;
根据所述基座姿态,以及所述上一时刻期望姿态,确定所述云台基于平面约束调节姿态对应的旋转轴和旋转角度;
根据所述旋转轴、所述旋转角度、以及所述上一时刻期望姿态,确定所述云台的当前时刻期望姿态;
根据所述当前时刻期望姿态,控制所述云台旋转,以使所述云台上装载的拍摄装置对应的视野中不含所述防护壳。
在一些实施例中,所述处理器在实现所述基于所述测量姿态,确定所述云台的基座姿态时,具体实现:
获取云台对应的多个关节角的转角;
根据所述多个关节角的转角,以及所述测量姿态,确定所述云台的所述基座姿态。
在一些实施例中,所述处理器在实现所述根据所述多个关节角的转角,以及所述测量姿态,确定所述云台的所述基座姿态时,具体实现:
将所述多个关节角的转角,以及所述多个关节角对应的转轴,进行轴角向四元数转换计算,获得对应的多个关节角四元数;
获取所述多个关节角四元数对应的逆四元数;
基于基座姿态与测量姿态间的四元叉乘关系,根据所述多个关节角四元数对应的逆四元数、以及所述测量姿态,获得所述云台的所述基座姿态。
在一些实施例中,所述多个关节角包括yaw关节角、roll关节角以及pitch关节角。
在一些实施例中,所述处理器在实现所述获取云台的测量姿态时,具体实现:
通过所述云台上设置的惯性测量单元检测获得所述测量姿态。
在一些实施例中,所述惯性测量单元包括陀螺仪、加速度计中至少一种。
在一些实施例中,所述处理器在实现所述根据所述基座姿态,以及所述上一时刻期望姿态,确定所述云台基于平面约束调节姿态对应的旋转轴和旋转角度时,具体实现:
根据所述基座姿态和所述上一时刻期望姿态,获得基座相对云台的旋转姿态;
根据所述基座相对云台的旋转姿态,确定所述云台基于平面约束调节姿态对应的所述旋转轴和所述旋转角度。
在一些实施例中,所述处理器在实现所述根据所述基座相对云台的旋转姿态,确定所述云台基于平面约束调节姿态对应的所述旋转轴和所述旋转角度时,具体实现:
将所述基座相对云台的旋转姿态进行四元数向欧拉角转换计算,获得对应的多个欧拉角;
将所述多个欧拉角进行轴角向四元数转换计算,获得对应的多个欧拉角四元数;
根据所述多个欧拉角四元数,确定所述云台基于平面约束调节姿态对应的所述旋转轴和所述旋转角度。
在一些实施例中,所述多个欧拉角包括Euler_yaw_rad角、Euler_roll_rad角和Euler_pitch_rad角,所述处理器在实现所述将所述多个欧拉角进行轴角向四元数转换计算,获得对应的多个欧拉角四元数时,具体实现:
将所述Euler_yaw_rad角进行轴角向四元数转换计算,获得所述Euler_yaw_rad角对应的q_yaw四元数;
将所述Euler_roll_rad角进行轴角向四元数转换计算,获得所述Euler_roll_rad角对应的q_roll四元数;
将所述Euler_pitch_rad角进行轴角向四元数转换计算,获得所述Euler_pitch_rad角对应的q_pitch四元数。
在一些实施例中,所述云台基于平面约束调节姿态对应的所述旋转轴包括第一旋转轴和第二旋转轴,所述云台基于平面约束调节姿态对应的所述旋转角度包括第一旋转角度和第二旋转角度,所述处理器在实现所述根据所述多个欧拉角四元数,确定所述云台基于平面约束调节姿态对应的所述旋转轴和所述旋转角度时,具体实现:
根据所述q_roll四元数和所述q_pitch四元数,获得对应的面四元数;
将所述面四元数进行四元数向轴角转换计算,获得所述面四元数对应的转轴和转角;
将所述面四元数对应的转角确定为所述第一旋转角度,将所述面四元数对应的转轴确定为所述第一旋转轴;
将所述Euler_yaw_rad角确定为所述第二旋转角度,将所述Euler_yaw_rad角对应的转轴确定为所述第二旋转轴。
在一些实施例中,所述处理器在实现所述根据所述旋转轴、所述旋转角度、以及所述上一时刻期望姿态,确定所述云台的当前时刻期望姿态时,具体实现:
将所述第一旋转角度和所述第一旋转轴进行轴角向四元数转换计算,获得对应的第一旋转角度四元数;
将所述第二旋转角度和所述第二旋转轴进行轴角向四元数转换计算,获得对应的第二旋转角度四元数;
根据所述第一旋转角度四元数、所述第二旋转角度四元数、以及所述上一时刻期望姿态,确定所述云台的所述当前时刻期望姿态。
在一些实施例中,所述处理器在实现所述根据所述第一旋转角度四元数、所述第二旋转角度四元数、以及所述上一时刻期望姿态,确定所述云台的所述当前时刻期望姿态之前,还实现:
将所述第一旋转角度和所述第二旋转角度进行调整,获得调整后对应的第一调整旋转角度和第二调整旋转角度;
所述处理器在实现所述将所述第一旋转角度和所述第一旋转轴进行轴角向四元数转换计算,获得对应的第一旋转角度四元数时,具体实现:
将所述第一调整旋转角度和所述第一旋转轴进行轴角向四元数转换计算,获得所述第一旋转角度四元数;
所述处理器在实现所述将所述第二旋转角度和所述第二旋转轴进行轴角向四元数转换计算,获得对应的第二旋转角度四元数时,具体实现:
将所述第二调整旋转角度和所述第二旋转轴进行轴角向四元数转换计算,获得所述第二旋转角度四元数。
在一些实施例中,所述处理器在实现所述将所述第一旋转角度和所述第二旋转角度进行调整,获得调整后对应的第一调整旋转角度和第二调整旋转角度时,具体实现:
将所述第一旋转角度乘以第一系数,获得第一乘积值,将所述第一乘积值确定为所述第一调整旋转角度;
将所述第二旋转角度乘以第二系数,获得第二乘积值,将所述第二乘积值确定为所述第二调整旋转角度。
在一些实施例中,所述处理器在实现所述根据所述第一旋转角度四元数、所述第二旋转角度四元数、以及所述上一时刻期望姿态,确定所述云台的所述当前时刻期望姿态时,具体实现:
获取所述第一旋转角度四元数对应的逆四元数,以及所述第二旋转角度四元数对应的逆四元数;
基于云台相邻时刻期望姿态间的四元叉乘关系,根据所述第一旋转角度四元数对应的逆四元数,所述第二旋转角度四元数对应的逆四元数、以及所述上一时刻期望姿态,获得所述当前时刻期望姿态。
本申请的实施例中还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序中包括程序指令,处理器执行所述程序指令,实现本申请实施例提供的云台的控制方法的步骤。
其中,所述计算机可读存储介质可以是前述实施例所述的云台的控制装置的内部存储单元,例如所述云台的控制装置的硬盘或内存。所述计算机可读存储介质也可以是所述云台的控制装置的外部存储设备,例如所述云台的控制装置上配备的插接式硬盘,智能存储卡(Smart Media Card,SMC),安全数字(Secure Digital,SD)卡,闪存卡(Flash Card)等。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以权利要求的保护范围为准。
- 云台的控制方法、装置、云台及计算机可读存储介质
- 计算机可读介质、跟焦器系统、云台系统、云台、云台的数据传输控制方法及装置