电子设备
文献发布时间:2023-06-19 12:16:29
技术领域
本申请属于终端技术领域,具体涉及一种电子设备。
背景技术
随着移动通信技术的不断发展,智能电子设备(如手机)的不断普及。在现有电子设备的厚度堆叠瓶颈下,为了提升拍摄效果,变焦摄像头已成为电子设备的常客。潜望摄像头通过棱镜反射,利用X\Y向(电子设备的长度方向或者宽度方向)空间增长变焦光路,从而规避Z向(电子设备的厚度方向)堆叠瓶颈,从而实现更远距离变焦。
目前电子设备中的潜望摄像头常用的是固定焦距远焦摄像头,通常能够实现3倍、5倍或10倍等固定倍率的光学变焦,从而实现较好的成像效果。但由于电子设备空间结构限制,更大倍率的放大效果主要依靠数码变焦实现,无法在保证较好成像效果的同时,满足用户对更多的变焦倍率的需求。
发明内容
本申请实施例的目的是提供一种电子设备,能够解决现有由于电子设备空间结构限制,在使用潜望摄像头拍摄时,无法在保证较好成像效果的同时,满足用户对更多的变焦倍率的需求的问题。
第一方面,本申请实施例提供一种电子设备,包括:第一壳体、第二壳体、柔性屏、第一驱动机构以及包括多个镜片组的潜望摄像头模组;
所述第一壳体与所述第二壳体滑动连接,所述第一壳体与第二壳体配合形成有容纳腔;
所述柔性屏的第一段与所述第一壳体固定连接,所述柔性屏的第二段与所述第二壳体滑动配合;
所述第一驱动机构和所述潜望摄像头模组均设置于所述容纳腔中;
所述第一驱动机构分别与所述第一壳体和所述潜望摄像头模组的部分连接,所述潜望摄像头模组的部分设置于所述第二壳体;
其中,所述第一驱动机构驱动所述第一壳体运动以使所述电子设备在收拢状态与展开状态之间切换;
所述电子设备处于所述展开状态时,所述多个镜片组之间的距离总和为第一距离值,所述电子设备处于所述收拢状态时,所述多个镜片组之间的距离总和为第二距离值,所述第一距离值大于所述第二距离值。
在本申请实施例中,电子设备的第一壳体与第二壳体滑动连接,第一壳体与第二壳体配合形成容纳腔;柔性屏的第一段与第一壳体固定连接,柔性屏的第二段与第二壳体滑动配合;第一驱动机构和潜望摄像头模组均设置于容纳腔中;第一驱动机构分别与第一壳体和潜望摄像头模组的部分连接,潜望摄像头模组的部分设置于第二壳体;其中,第一驱动机构驱动第一壳体运动以使电子设备在收拢状态与展开状态之间切换;电子设备处于展开状态时,多个镜片组之间的距离总和为第一距离值,电子设备处于收拢状态时,多个镜片组之间的距离总和为第二距离值,第一距离值大于第二距离值,如此,在电子设备处于展开状态的情况下,利用电子设备扩展出的空间,通过复用能够使电子设备在收拢状态与展开状态之间切换的驱动机构,调节潜望摄像头内部不同镜片组之间的距离,延长潜望摄像头内部光路,在用户使用潜望摄像头拍摄时,能够在保证较好成像效果的同时,满足用户对更大变焦倍率的需求。
附图说明
图1为本申请实施例提供的电子设备的结构示意图;
图2为本申请实施例的柔性屏的结构示意图;
图3为本申请实施例的第一驱动机构中第一从动齿轮组的结构示意图;
图4为本申请实施例的潜望摄像头模组的结构示意图之一;
图5为本申请实施例的潜望摄像头模组的结构示意图之二;
图6为本申请实施例对潜望摄像头模组实施调焦的工作状态示意图之一;
图7为对应图6的潜望摄像头模组内各镜片组的位置关系示意图;
图8为对应图6的潜望摄像头模组内的光路示意图;
图9为本申请实施例对潜望摄像头模组实施调焦的工作状态示意图之二;
图10为对应图9的潜望摄像头模组内各镜片组的位置关系示意图;
图11为对应图9的潜望摄像头模组内的光路示意图;
图12为本申请实施例对潜望摄像头模组实施调焦的工作状态示意图之三;
图13为对应图12的潜望摄像头模组内各镜片组的位置关系示意图;
图14为对应图12的潜望摄像头模组内的光路示意图;
图15为本申请实施例对潜望摄像头模组实施调焦的工作状态示意图之四;
图16为对应图15的潜望摄像头模组内各镜片组的位置关系示意图;
图17为对应图15的潜望摄像头模组内的光路示意图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员获得的所有其他实施例,都属于本申请保护的范围。
本申请的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本申请的实施例能够以除了在这里图示或描述的那些以外的顺序实施,且“第一”、“第二”等所区分的对象通常为一类,并不限定对象的个数,例如第一对象可以是一个,也可以是多个。此外,说明书以及权利要求中“和/或”表示所连接对象的至少其中之一,字符“/”,一般表示前后关联对象是一种“或”的关系。
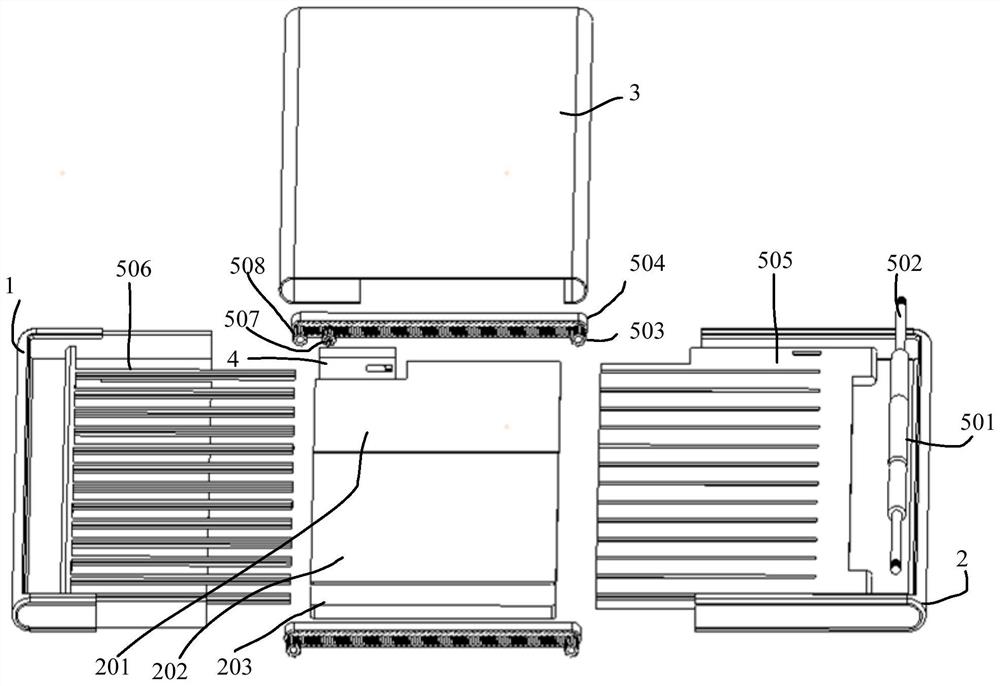
如图1所示,为本申请实施例提供的电子设备的结构示意图。其中,该电子设备包括:第一壳体1、第二壳体2、柔性屏3、第一驱动机构以及包括多个镜片组的潜望摄像头模组4。
所述第一壳体1与所述第二壳体2滑动连接,所述第一壳体1与第二壳体2配合形成有容纳腔;所述柔性屏3的第一段与所述第一壳体1固定连接,所述柔性屏3的第二段与所述第二壳体2滑动配合;所述第一驱动机构和所述潜望摄像头模组4均设置于所述容纳腔中;所述第一驱动机构分别与所述第一壳体1和所述潜望摄像头模组4的部分连接,所述潜望摄像头模组4的部分设置于第二壳体2。
其中,所述第一驱动机构驱动所述第一壳体1运动以使所述电子设备在收拢状态与展开状态之间切换;所述电子设备处于所述展开状态时,所述多个镜片组之间的距离总和为第一距离值,所述电子设备处于所述收拢状态时,所述多个镜片组之间的距离总和为第二距离值,所述第一距离值大于所述第二距离值。
需要说明的是,柔性屏3的整体形状大致呈U型,柔性屏3的第二段绕过所述第一驱动机构的上方,与第一驱动机构的下方连接。
这里,第一驱动结构驱动第一壳体1运动的同时,也驱动柔性屏3运动。
这里,当第一驱动机构驱动第一壳体1以及柔性屏3运动时,柔性屏3的第二段通过第一驱动机构与第二壳体2滑动配合,使柔性屏3的第二段的至少部分从容纳腔内露出,也就是使柔性屏3展开(即柔性屏3的显示面积增大),或者使柔性屏3的第二段的至少部分收容到容纳腔内,也就是使柔性屏3收拢。
这里,所述电子设备处于收拢状态指的是,柔性屏3的第一段露在外面,柔性屏3的第二段隐藏在容纳腔内。
所述电子设备处于展开状态指的是,柔性屏3的第一段和第二段的至少部分均露在外面,也就是说,通过第一驱动机构驱动柔性屏3的第二段逐渐从容纳腔露出,使得柔性屏3的显示面积变大,容纳腔的空间也变大。即电子设备处于展开状态可以是处于完全展开状态(即柔性屏3的第一段和第二段的全部均露在外面),也可以是处于部分展开状态(即柔性屏3的第一段和第二段的部分均露在外面)。
这里,第一驱动机构还与第二壳体2连接。
在电子设备处于展开状态的情况下,利用电子设备扩展出的空间,通过复用能够使电子设备在收拢状态与展开状态之间切换的驱动机构,驱动潜望摄像头模组4的部分,从而调节潜望摄像头模组4内部不同镜片组之间的距离,延长潜望摄像头内部光路,进而在用户使用潜望摄像头模组4拍摄时,能够在保证较好成像效果的同时,满足用户对更大变焦倍率的需求。
参见图1和图2,柔性屏3包括:玻璃盖板301、显示面板302和柔性支撑板303。其中,柔性屏3在显示面板302和柔性支撑板303上的预设位置设置有前摄开孔304。玻璃盖板301主要用于保护显示面板303,这里,显示面板303为显示模组部分。柔性支撑板303在第一驱动机构的驱动作用下,带动柔性屏3伸缩运动(即展开或收拢)。
作为一可选的实现方式,所述第一驱动机构包括:驱动装置501;减速器502,所述减速器502与所述驱动装置501连接;传动组件,所述传动组件包括:主动齿轮503,所述主动齿轮503与所述减速器502连接;至少一个从动齿轮组;传动带504,所述传动带504分别连接所述主动齿轮503和所述至少一个从动齿轮组;第一支架505,所述第一支架505与所述第二壳体2固定连接;第二支架506,所述第二支架506与所述第一支架505滑动连接,所述第二支架506能够相对于所述第一支架505运动,且所述第二支架506分别与所述第一壳体1和所述传动带504连接;其中,第一从动齿轮组还与所述潜望摄像头模组4的部分连接,所述第一从动齿轮组507为所述至少一个从动齿轮组中的一者。
这里,驱动装置501用于提供柔性屏3运动的动力;减速器502用于对驱动装置501输出的转速进行转换,降低转速驱动柔性屏3。可选地,驱动装置501为驱动电机。
具体的,传动带504绕设在主动齿轮503和至少一个从动齿轮组上以使传动带504张紧。
这里,减速器502包括齿轮组和驱动轴,具体的,驱动装置501通过齿轮组以及驱动轴连接主动齿轮503,驱动装置501用于驱动主动齿轮503转动,从而驱动传动带504运动以带动第一壳体1和柔性屏3运动,以使柔性屏3的第二段至少部分地露出或隐藏于容纳腔中,也就是使电子设备在展开状态和收拢状态之间切换。
需要说明的是,主动齿轮503用于将减速器502的动力传递到传动带504上,并支撑传动带504;传动带504用于传递动力,并通过第二支架506带动柔性屏3运动(即展开或收拢);至少一个从动齿轮组用于支撑传动带504转动。其中,第一从动齿轮组507还用于带动潜望摄像头模组4的部分,具体的带动多个镜片组中的至少一者,运动。
需要说明的是,在一可选的实施例中,至少一个从动齿轮组包括所述第一从动齿轮组507和第二从动齿轮组508,如图1所示,该第二从动齿轮组508包括第二齿轮,该第二齿轮与传动带504连接。具体的,主动齿轮503与第二从动齿轮组508相配合,使传动带504张紧。其中,第一从动齿轮组507主要用于带动潜望摄像头模组4的部分,具体的带动多个镜片组中的至少一者,运动。
上述实施例中,在驱动装置501驱动主动齿轮503转动,从而驱动传动带504运动以带动第一壳体1和柔性屏3运动的同时,第一从动齿轮组507带动潜望摄像头模组4的部分,具体的带动多个镜片组中的至少一者,运动;其中,在这一过程中,第一从动齿轮组507带动潜望摄像头模组4的部分移动的距离,可以与第一壳体1相对于第二壳体2移动的距离相等,也可以不相等。其主要由第一从动齿轮组507的齿轮之间的传动比确定,若传动比为1:1,则相等;否则,则不相等。
在另一可选的实施例中,从动齿轮组的数量为1个,即为第一从动齿轮组507。此时,第一从动齿轮组507既用于与主动齿轮503相配合,使传动带504张紧,与驱动装置501共同作用以带动第一壳体1和柔性屏3运动;还用于带动潜望摄像头模组4的部分,具体的带动多个镜片组中的至少一者,运动。
这里,第一支架505与第二壳体2固定连接,从而固定电子设备整机元件和屏幕。
可选地,第一支架505设有滑轨;第二支架506设有与滑轨相配合的滑槽,从而实现第二支架506与第一支架505的滑动连接。
具体的,第一支架505通过第二连接件与传动带504连接,柔性屏3通过第三连接件与传动带504连接。这里,第二连接件和第三连接件间隔设置在传动带504上。这里,传动带504运动时带动第一支架505运动,从而推动柔性屏3伸缩运动,并对柔性屏3进行支撑。
需要说明的是,本申请实施例的电子设备还包括:印制电路板(Printed CircuitBoard,PCB)201、电池202和扬声器BOX203。潜望摄像头模组4、第一驱动机构通过柔性电路(Flexible Printed Circuit,FPC)板和PCB连接,电池202、扬声器BOX203固定在电子设备的机壳上,通过板对板(Board To Board,BTB)连接器和PCB板连接。
作为一可选的实现方式,如图3所示,所述第一从动齿轮组507包括连接轴6、第一齿轮7和第二齿轮8;所述连接轴6分别连接所述第一齿轮7和所述第二齿轮8,所述第一齿轮7与所述传动带504连接,所述第二齿轮8与所述潜望摄像头模组4的部分连接。
这里,驱动装置501驱动主动齿轮503转动,从而驱动传动带504运动,第一齿轮7和第二齿轮8随之转动,从而实现第二齿轮8带动潜望摄像头模组4的部分运动。
作为一可选的实现方式,参见图4、图5~图17,所述多个镜片组包括:第一镜片组41、第二镜片组42和第三镜片组43;所述第一镜片组41包括光转向组件411,所述第三镜片组43包括感光组件431,所述第二镜片组42包括第一光学镜头421,所述第二镜片组42位于所述第一镜片组41和所述第三镜片组43之间;所述光转向组件411对入射光线进行转向,并使转向后的光线能够沿着所述感光组件431的感光路径,在穿过所述第一光学镜头421后被所述感光组件431接收以成像。
具体的,所述潜望摄像头模组4还包括:第一镜筒44和第二镜筒45,所述第一镜筒44与所述第二镜筒45套接,且所述第一镜筒44能够相对于所述第二镜筒45运动,所述第一镜筒44的第一侧壁设有第一开口441,所述第二镜筒45的第二侧壁设有第二开口451,所述入射光线通过所述第二开口451和所述第一开口441进入所述第一镜片组41;所述第一镜片组41固定于所述第一镜筒44内,所述第二镜片组42和所述第三镜片组43固定于所述第二镜筒45内;
其中,所述第二齿轮8通过第一连接件9与目标镜筒连接,所述目标镜筒为所述第一镜筒44或所述第二镜筒45。
需要说明的是,第一镜筒44套接在第二镜筒45内,且第一镜筒44的筒口与第二镜筒45的筒口相对。通过第一驱动机构的驱动将动力传递至第二齿轮,从而使得第一镜筒44与第二镜筒45发生相对运动。较优地,潜望摄像头模组4的光学焦距通过第一驱动机构的驱动调至最大焦距时,第一镜筒44套接在第二镜筒45内,彼此不脱离,其目的是为了使潜望摄像头模组4的各镜片组中的镜头保持同心。
需要说明的是,可选地,光转向组件411为棱镜,该棱镜用于反射入射光线,从而改变入射光线的光路方向,使得光路方向由电子设备厚度方向转换为长度方向或宽度方向。可选地,棱镜为截面为等腰直角三角形。进一步地,截面为等腰直角三角形的棱镜的斜面镀有增反膜,以减少反射产生的光路损失。
第一镜片组41还包括:凸棱镜412和凹棱镜413,其中,所述凸棱镜412和凹棱镜413均固定在第一镜筒44内。
这里,凸棱镜412可通过第一紧固件414固定于第一镜筒44内。当然,凸棱镜412也可通过胶水、双面胶等固定于第一镜筒44内。
凹棱镜413可通过第二紧固件415固定于第一镜筒44内。当然,凹棱镜413也可通过胶水、双面胶等固定于第一镜筒44内。
需要说明的是,凸棱镜412和凹棱镜413均用于调整光路。其中,上述棱镜可根据光路选择其他形状的棱镜,这里不做具体限定。
这里,为了防止液体和灰尘进入潜望摄像头模组4内部,同时为了装饰第一镜筒44,可选地,第一镜片组41还包括设置于第一开口441处的透明镜片442。该透明镜片442用于封堵第一开口441,且使入射光线透过该透明镜片442进入第一镜片组41内。可选地,透明镜片441通过点胶或双面胶粘接方式封堵住第一开口441。
需要说明的是,第一镜筒44用于固定和支撑第一镜片组41,也就是固定和支撑透明镜片442、光转向组件411、凸棱镜412和凹棱镜413,确保光路同心。
这里,第一光学镜头421可通过第三紧固件422固定于第二镜筒45内。当然,第一光学镜头421也可通过胶水、双面胶等固定于第二镜筒45内。
可选地,第一光学镜头421为凸棱镜。当然也可根据光路选择其他形状棱镜。需要说明的是,第二镜片组42根据变焦光路需求还可增加光学镜头的数量。
可选地,所述第三镜片组43还包括:第二光学镜头432、红外滤光片433、和摄像头电路板434;其中,所述感光组件431设置于所述摄像头电路板434上。
这里,感光组件431用于感应和记录光信号。可选地,感光组件431为感光元件,如CMOS传感器、电荷耦合器件(Charge Coupled Device,CCD)等。
其中,第二光学镜头432用于调整光路。红外滤光片433用于滤除进入到潜望摄像头模组4内的红外光,降低照片底噪。
摄像头电路板434用于对来自感光组件431的光信号进行转换处理,最终得到图像数据。
为了达到更精准的对焦效果,作为一可选地实现方式,本申请实施例的电子设备还包括:
第二驱动机构10;
其中,所述第二驱动机构10设置于所述摄像头电路板434上,所述第二光学镜头432和所述红外滤光片433设置于所述第二驱动机构10,所述第二驱动机构10驱动所述第二光学镜头432沿所述感光路径运动;
这里,第二驱动机构10可为音圈马达。具体的,第二驱动机构10在摄像头电路板434的控制下,带动第二光学镜头432进行相对位置调整,实现摄像头精准对焦,同时作为支架支撑第三镜片组。
或者,所述第二驱动机构10与所述第三镜片组43连接,所述第二驱动机构10驱动所述第三镜片组43沿所述感光路径运动。这里,本实现方式图中未显示。需要说明的是,该实现方式中第二驱动机构10可单独控制第三镜片组43的运动。
可选地,所述第三镜片组43还包括:摄像头保护板435,该摄像头保护板435与摄像头电路板434固定连接。
这里,摄像头保护板435用于保护摄像头电路板434,对第三镜片组43进行保护和支撑,与第二镜筒45固定连接。
基于此,作为一可选的实现方式,参见图3、图6和图9,所述第二齿轮8为圆柱齿轮,所述第一连接件9为齿条,所述齿条设置于所述目标镜筒的第三侧壁,且与所述圆柱齿轮相啮合。
作为另一可选的实现方式,参见图12和图15,所述第二齿轮8为第一锥齿轮,所述第一从动齿轮组507还包括:丝杆11,所述丝杆11的一端设置有与所述第一锥齿轮相啮合的第二锥齿轮12;所述第一连接件9为滑动机构,所述滑动机构设置于所述目标镜筒的第四侧壁,其中,所述丝杆11套设在所述滑块机构内。
需要说明的是,第一锥齿轮主要用于传递传动带504上的动力,改变转动方向,与丝杆11上的第二锥齿轮12啮合从而带动丝杆11转动。丝杆11通过一端的第二锥齿轮12与第一锥齿轮啮合,传递动力并通过丝杆11带动潜望摄像头模组4的多个镜片组中的至少一者运动。
这里,滑块机构内部具有螺纹和滚珠,用于保证传动的平稳性。
作为一可选的实现方式,在所述目标镜筒为所述第一镜筒44的情况下,为了实现第一镜筒44在第一驱动机构的驱动作用下,相对于第二镜筒45运动,参见图5,所述第二镜筒45的第三侧壁设有限位槽452,在所述第一驱动机构通过所述第一连接件9驱动所述第一镜筒44运动的情况下,所述第一连接件9可沿所述限位槽452的长度方向移动。
需要说明的是,图5展示的是第一连接件9为滑块机构,所述第二齿轮8为第一锥齿轮的实现方式所对应的第二镜筒45的结构示意,当然,在第一连接件9为齿条,第二齿轮8为圆柱齿轮的实现方式也同样适用。
作为一可选的实现方式,参见图12和图15,所述目标镜筒为所述第一镜筒44的情况下,所述第二镜筒45固定于所述第二壳体2。
需要说明的是,目标镜筒为第一镜筒44,即第二齿轮8通过第一连接件9与第一镜筒44连接,第二镜筒45固定于第二壳体2,说明第一驱动机构驱动第一镜片组41在光学变焦过程中运动,第二镜片组42在变焦过程中位置保持不变,第三镜片组43可通过第二驱动机构10进行位置微调。
这里,由于第一镜片组41在光学变焦过程中是运动的,即入射光线进入第一镜片组41的位置是变化的。
这里,在第一齿轮7和第二齿轮8之间的传动比为1的情况下,即第一镜片组41的运动与第一壳体1的运动同步,第一壳体1上设置第二通孔,入射光线通过该第二通孔与第一镜片组41的第一开口441进入第一镜片组41。
基于此,作为一可选的实现方式,在所述第一齿轮7和所述第二齿轮8之间的传动比不为1的情况下,所述第一壳体1的预设区域具有透光性;在所述第一驱动机构驱动所述第一镜片组41运动时,所述预设区域覆盖所述第一镜片组41的运动区域。
需要说明的是,在第一齿轮7和第二齿轮8之间的传动比不为1的情况下,说明第一镜片组41的运动与第一壳体1的运动步调不一致,为了不影响入射光线进入第一镜片组41,与第一镜片组41的运动区域对应的第一壳体1的预设区域具有透光性,比如,可通过将该预设区域对应的壳体部分挖空,设置可透光的玻璃或者镜片来实现。
作为一可选的实现方式,参见图6和图9,在目标镜筒为所述第二镜筒45的情况下,所述第一镜筒44固定于所述第二壳体2,且所述第二壳体2设置有第一通孔201,所述入射光线通过所述第一通孔和所述第一开口441进入所述第一镜片组41。
需要说明的是,目标镜筒为第二镜筒45,即第二齿轮8通过第一连接件9与第二镜筒45连接,第一镜筒44固定于第二壳体2,说明第一驱动机构驱动第二镜片组42和第三镜片组43在光学变焦过程中运动,第一镜片组41在变焦过程中位置保持不变,同时第三镜片组43还可通过第二驱动机构10进行位置微调。在实现更大倍率的变焦过程中,第一驱动机构驱动第二镜筒45运动的运动方向与使电子设备进入展开状态的柔性屏3的运动方向相同。
由于第一镜片组41固定于第二壳体2上,在变焦过程中位置保持不变,所以入射光线进入第一镜片组41的入光位置不变,第一通孔201与第一开口441保持相对固定,这里第一通孔可以是电子设备的后摄开孔。
下面就以下两个示例,具体说明本申请实施例的电子设备的潜望摄像头模组的调焦工作原理。
示例一
该示例中,参见图6和图9,第一从动齿轮组的第二齿轮8为圆柱齿轮,第一连接件9齿条,齿条设置于第二镜筒45的第三侧壁,且与圆柱齿轮相啮合;且第一镜筒44固定于第二壳体2。
在电子设备处于收拢状态(即柔性屏3的第二段隐藏在容纳腔内)下,第二齿轮8的状态以及潜望摄像头模组4的状态,如图6所示,即第二齿轮8与齿条处于啮合状态,主动齿轮和驱动装置的驱动轮啮合保持潜望摄像头模组4位置不动;此时,潜望摄像头模组4可使用固定倍率的光学变焦,进行拍摄交互;其中,潜望摄像头模组4内部各镜片组的位置关系(具体的,各镜片组处于相对紧凑的状态,光路较短),如图7所示;对应的光路示意图,如图8所示。
在电子设备的柔性屏展开时,电子设备内部的容纳腔的空间变大,提供给潜望摄像头模组4实现更大倍率所需要的空间;具体的,传动带504通过第二齿轮8和齿条以一定的传动比带动第二镜片组42和第三镜片组43运动,不同镜片组之间距离发生改变,使得潜望摄像头模组4内部光路延长,从而实现更大倍率的光学变焦(比如60倍、120倍等),此时第二齿轮8的状态以及潜望摄像头模组4的状态,如图9所示,该图对应的是柔性屏展开到最大时状态,此时,第二齿轮8与齿条处于啮合状态,主动齿轮和驱动装置的驱动轮啮合保持潜望摄像头模组4位置不动;其中,潜望摄像头模组4内部各镜片组的位置关系,如图10所示,对应的光路示意图,如图11所示。
需要说明的是,此时与第三镜片组43连接的第二驱动机构10可对第三镜片组43的位置进行多位置精确调节,从而进一步调整匹配第一镜片组41和第二镜片组42的位置调节,实现更多位置、更多放大倍率选择,同时也可以补偿第二齿轮8和齿条传动过程中带来的位置误差,使镜片更好的聚焦。
示例二
该示例中,参见图12和图15,第一从动齿轮组的第二齿轮8为第一锥齿轮,第一连接件9为滑块机构,滑块机构设置于第一镜筒44的第四侧壁,且通过套设在滑块机构上内的丝杆11,第一锥齿轮与设置在丝杆11一端的第二锥齿轮12相啮合,且第二镜筒45固定于第二壳体2。
在电子设备处于收拢状态(即柔性屏3的第二段隐藏在容纳腔内)下,滑块机构的状态以及潜望摄像头模组4的状态,如图12所示,此时,潜望摄像头模组4可使用固定倍率的光学变焦,进行拍摄交互;其中,潜望摄像头模组4内部各镜片组的位置关系(具体的,各镜片组处于相对紧凑的状态,光路较短),如图13所示;对应的光路示意图,如图14所示。
在电子设备的柔性屏展开时,电子设备内部的容纳腔的空间变大,提供给潜望摄像头模组4实现更大倍率所需要的空间;具体的,传动带504通过第二齿轮8、丝杆11和第一镜筒44上的滑块机构带动第一镜片组41运动,不同镜片组之间距离发生改变,使得潜望摄像头模组4内部光路延长,从而实现更大倍率的光学变焦(比如60倍、120倍等),此时,第二齿轮8的状态以及潜望摄像头模组4的状态,如图15所示;其中,潜望摄像头模组4内部各镜片组的位置关系,如图16所示,对应的光路示意图,如图17所示。
此时与第三镜片组43连接的第二驱动机构10可对第三镜片组43的位置进行多位置精确调节,从而进一步调整匹配第一镜片组41和第二镜片组42的位置调节,实现更多位置、更多放大倍率选择。
需要说明的是,本示例中的锥齿轮传动机构部分也可使用涡轮蜗杆机构代替。
本申请实施例的电子设备可以是手机、电子书、平板电脑等电子产品。电子设备的潜望摄像头模组中的各镜片组的镜片数量和种类、镜片组数量可根据光学变焦需求设计,本发明实施方式中的实例仅为优选方式,用于说明工作方式和原理,不作为限制。
本申请实施例中放大倍率仅作为优选倍率,可根据需求向更小或更大倍率扩展。
本申请实施例中电子设备处于收拢状态(起始位置)和电子设备处于展开状态(最大位置),仅为实现固定放大倍率的两点,也在其中各位置通过齿轮-齿条传动机构或者锥齿轮传动机构的控制从而实现从起始位置到最大位置之间多位置不同倍率放大效果;同时潜望摄像头模组移动的终点位置也可以不是触屏展开最大位置,只需在终点位置断开传动即可。
上面结合附图对本申请的实施例进行了描述,但是本申请并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本申请的启示下,在不脱离本申请宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本申请的保护之内。
- 电子设备、外部电子设备及包括电子设备和外部电子设备的系统
- 电子设备用铜合金、电子设备用铜合金的制造方法、电子设备用铜合金轧材及电子设备用组件