机器人焊接复杂钢筋骨架的施工方法
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及桥梁工程领域,特指一种机器人焊接复杂钢筋骨架的施工方法。
背景技术
目前焊接机器人在钢筋网片焊接中得到广泛应用。机器人焊接钢筋网片时,每条焊缝的焊接参数恒定,人为影响比较小,焊接质量可以得到保证,而且机器人可以24小时连续生产,实现产品的批量自动化生产。此外,可以通过修改程序来调整焊接参数,适应不同的焊接工况,较传统焊接方法优势明显。然而,目前焊接机器人多适用于焊接纵横间距均匀的钢筋网片,该类网片钢筋类型少且网片形状规则,纵筋横筋间距统一,并且该类网片焊接过程中不需要调整焊接参数,焊接工况单一。焊接机器人对于间距不等、钢筋焊接位置变化复杂、不同直径钢筋类型较多,且有各种弯折角度的钢筋骨架的焊接适用性较差,焊接机器人难以实现复杂钢筋骨架的自动焊接。
发明内容
本发明的目的在于克服现有技术的缺陷,提供一种机器人焊接复杂钢筋骨架的施工方法,解决现有的焊接机器人对间距不等、钢筋焊接位置变化复杂、不同之间的钢筋类型多且各种弯折角度的钢筋骨架的焊接适用性较差的问题。
实现上述目的的技术方案是:
本发明提供了一种机器人焊接复杂钢筋骨架的施工方法,包括如下步骤:
依据钢筋骨架的设计图纸布设钢筋,所布设好的钢筋在连接处形成焊接位置点;
从所述钢筋骨架的设计图纸中获取所有的连接位置点及对应的焊接参数信息;
制作与连接位置点相对应的二维码,所制作的二维码中包含与连接位置点相对应的焊接参数信息,并将所制作的二维码喷涂于一磁性基板上;
将所述磁性基板吸附于布设好的钢筋上并靠近对应的焊接位置点设置;以及
提供焊接机器人,利用所述焊接机器人完成对布设好的钢筋上的所有焊接位置点的焊接,在进行焊接时,所述焊接机器人通过扫描设置在焊接位置点处的磁性基板上的二维码获取对应的焊接参数信息,并根据所获取的焊接参数信息完成对焊接位置点的焊接。
本发明通过在磁吸基板上制作包含焊接参数信息的二维码,利用二维码提供焊接位置点处的实际焊接参数,能够让机器人适应各种复杂的焊接工况,顺利的完成焊接作业,保证焊接质量。磁性基板既能实现焊接位置的快速准确定位,又能够实现提供不同焊接位置的焊接参数。
本发明机器人焊接复杂钢筋骨架的施工方法的进一步改进在于,还包括:
于所述焊接机器人上设置电磁铁;
待所述焊接机器人完成一焊接位置点处的焊接作业时,通过所述电磁铁吸附设置在完成焊接的焊接位置点处磁性基板以完成磁性基板的回收。
本发明机器人焊接复杂钢筋骨架的施工方法的进一步改进在于,在设置电磁铁时,将所述电磁铁设于所述焊接机器人的末端处;
并于所述焊接机器人的底部处设置一回收盒,在所述焊接机器人通过所述电磁铁吸附磁性基板时,所述焊接机器人将所吸附的磁性基板放置于所述回收盒内。
本发明机器人焊接复杂钢筋骨架的施工方法的进一步改进在于,所述焊接参数信息包括焊接角度参数、焊接长度参数以及焊接电流参数。
本发明机器人焊接复杂钢筋骨架的施工方法的进一步改进在于,所述焊接机器人包括一控制系统;
在所述焊接机器人的末端设置二维码读取装置,将所述二维码读取装置与所述控制系统连接;
通过所述二维码读取装置扫描对应的二维码并获取得到焊接参数信息,所述二维码读取装置将所述焊接参数信息发送给所述控制系统;
所述控制系统依据所述焊接参数信息进行调整并控制所述焊接机器人完成焊接作业。
本发明机器人焊接复杂钢筋骨架的施工方法的进一步改进在于,所述焊接机器人沿所布设的钢筋的设置方向逐一的对焊接位置点进行焊接。
本发明机器人焊接复杂钢筋骨架的施工方法的进一步改进在于,在布设钢筋时,提供钢筋绑扎焊接台架,将钢筋布设在所提供的钢筋绑扎焊接台架上。
附图说明
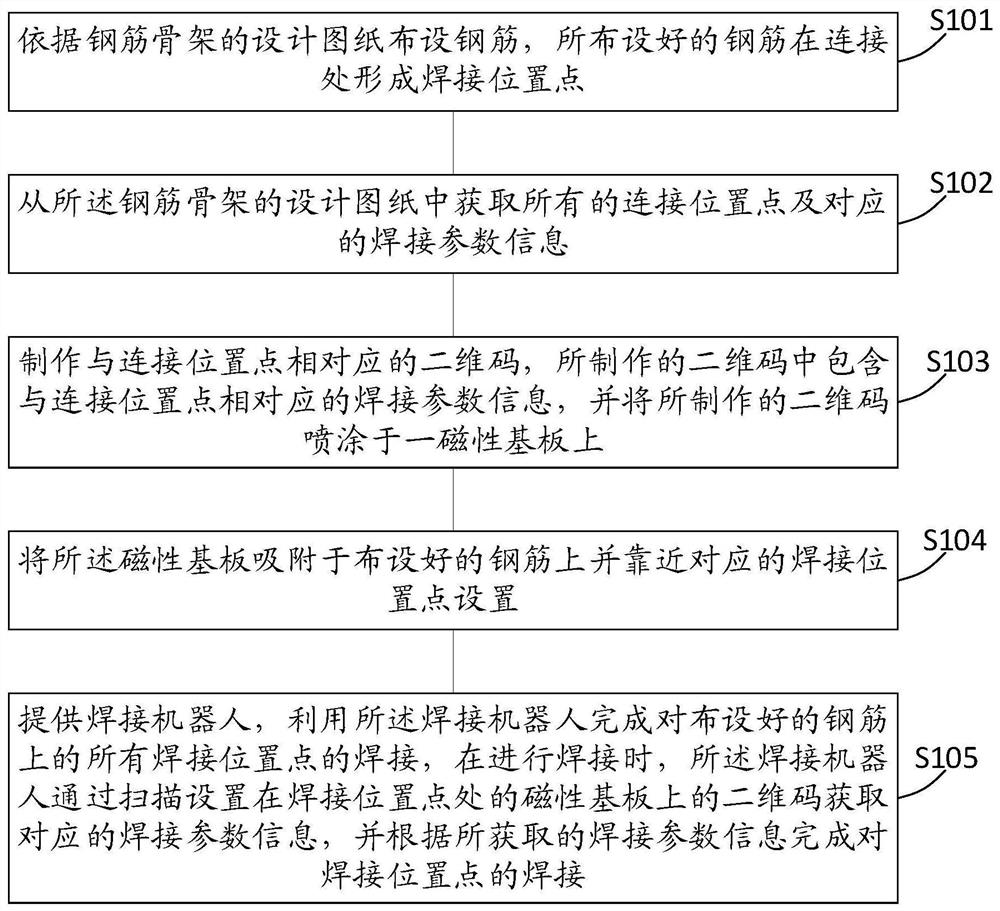
图1为本发明机器人焊接复杂钢筋骨架的施工方法的流程图。
图2为本发明机器人焊接复杂钢筋骨架的施工方法焊接的钢筋骨架的第一实施例的结构示意图。
图3为本发明机器人焊接复杂钢筋骨架的施工方法焊接的钢筋骨架的第二实施例的结构示意图。
图4为本发明机器人焊接复杂钢筋骨架的施工方法中使用的焊接机器人的结构示意图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明。
参阅图1,本发明提供了一种机器人焊接复杂钢筋骨架的施工方法,用于解决现有的焊接机器人难以实现复杂钢筋骨架的自动焊接,本发明的施工方法通过磁性基板将包含焊接参数信息的二维码设于焊接位置点处,利用该磁性基板既起到了实现焊接位置的快速准确定位,又起到实现不同焊接位置的焊接参数调节,让焊接机器人能够适应各种复杂钢筋的焊接工况,更好的完成焊接作业。磁性基板可方便的吸附于钢筋上,又可以通过焊接机器人上设置的电磁铁方便的完成回收,不影响后续浇筑混凝土,本发明的施工方法能够方便的让机器人适用于各种复杂焊接工况,提升焊接机器人的应用场景,提升焊接机器人的智能化水平,保证焊接质量。下面结合附图对本发明机器人焊接复杂钢筋骨架的施工方法进行说明。
参阅图1,显示了本发明机器人焊接复杂钢筋骨架的施工方法的流程图。下面结合图1,对本发明机器人焊接复杂钢筋骨架的施工方法进行说明。
如图1所示,本发明的机器人焊接复杂钢筋骨架的施工方法包括如下步骤:
执行步骤S101,依据钢筋骨架的设计图纸布设钢筋,所布设好的钢筋在连接处形成焊接位置点;接着执行步骤102;
执行步骤S102,从钢筋骨架的设计图纸中获取所有的连接位置点及对应的焊接参数信息;接着执行步骤103;
执行步骤S103,制作与连接位置点相对应的二维码,所制作的二维码中包含与连接位置点相对应的焊接参数信息,并将所制作的二维码喷涂于一磁性基板上;接着执行步骤是104;
执行步骤S104,将磁性基板吸附于布设好的钢筋上并靠近对应的焊接位置点设置;接着执行步骤是105;
执行步骤S105,提供焊接机器人,利用焊接机器人完成对布设好的钢筋上的所有焊接位置点的焊接,在进行焊接时,焊接机器人通过扫描设置在焊接位置点处的磁性基板上的二维码获取对应的焊接参数信息,并根据所获取的焊接参数信息完成对焊接位置点的焊接。
本发明的施工方法适用于复杂的钢筋骨架的自动焊接,复杂的钢筋骨架包括钢筋间距不等,钢筋焊接位置不同,钢筋的直径不同等情形,复杂的钢筋骨架中的各个焊接位置点处的焊接工况不同,也即焊接参数不一致,这样使得焊接机器人无法实现该些不同情况的焊接位置点的自动焊接,而本发明的施工方法正是用于解决焊接机器人的适用性差的问题,通过磁性基板制作包含焊接参数信息的二维码,进而将该磁性基板吸附在钢筋的焊接位置点处,以实现为焊接机器人提供焊接参数信息,让焊接机器人能够顺利的完成该焊接位置点的焊接作业。磁性基板既起到了快速准确定位的作用,又可以实现不同焊接位置的焊接参数的调整,达到可以焊接复杂钢筋骨架的目的。
在本发明的一种具体实施方式中,在布设钢筋时,提供钢筋绑扎焊接台架,将钢筋布设在所提供的钢筋绑扎焊接台架上。
较佳地,钢筋绑扎焊接台架能够对其上布设的钢筋起到限位固定的作用,可避免钢筋发生窜动而影响钢筋骨架的形状。
进一步地,如图2所示,钢筋骨架20包括多个钢筋21,多个钢筋21依据钢筋骨架20的设计形状完成布设,其中斜向设置的钢筋可通过支架等结构支撑住,钢筋21和钢筋21间相交的连接处形成焊接位置点,该焊接位置点也即后续焊接机器人的焊接作业位置。
在进一步地,布设钢筋时,安装钢筋骨架的设计图纸对钢筋进行翻样、下料、加工,而后依据设计图纸将钢筋安装在钢筋绑扎焊接台架上,通过钢筋绑扎焊接台架固定住对应的钢筋,以便于后续焊接机器人的焊接作业的顺利进行,为钢筋的稳定牢固提供了保障。
在本发明的一种具体实施方式中,焊接参数信息包括焊接角度参数、焊接长度参数以及焊接电流参数。
具体地,根据钢筋骨架的设计图纸,先获取得到所有的钢筋的连接位置点,在该设计图纸中的连接位置点与布设好的钢筋的焊接位置点是一一对应的,接着根据设计图纸分析连接位置点处的焊接工况,得到焊接参数信息,从而能够得到所有的连接位置点以及与各连接位置点相匹配的焊接参数信息,进而将焊接参数信息标识到布设好的钢筋的焊接位置点处即可实现对焊接机器人提供焊接作业的指导。
进一步地,制作二维码时,提供磁性基板,所提供的磁性基板为磁性材料制成的方形板,长宽为10mm,厚度为3mm。该磁性基板具有磁力,能够吸附在金属件上。根据各连接位置点的焊接参数信息制作对应的二维码,并将二维码喷涂在磁性基板上,由于连接位置点与焊接位置点一一对应,这样所制得的磁性基板也就与焊接位置点相对应的,在设置磁性基板上,将磁性基板通过磁力吸附在钢筋上对应的焊接位置点处,用以标识焊接参数信息。
较佳地,将磁性基板吸附在焊接位置点上远离焊接作业的一侧,使得磁性基板不会妨碍焊接作业。
在本发明的一种具体实施方式中,本发明的施工方法还包括:
如图4所示,于焊接机器人40上设置电磁铁41;
待焊接机器人40完成一焊接位置点处的焊接作业时,通过电磁铁41吸附设置在完成焊接的焊接位置点处的磁性基板以完成磁性基板的回收。
较佳地,在焊接机器人40完成一个焊接位置点处的焊接作业之后,该焊接机器人40就为电磁铁41通电,使得电磁铁41产生磁力,这样电磁铁41靠近已完成焊接的焊接位置点处的磁性基板时,电磁铁41能够吸附该磁性基板,又因钢筋绑扎焊接台架对钢筋有限位固定作用,能够避免电磁铁41在吸附磁性基板时对钢筋的位置产生影响。
进一步地,在设置电磁铁41时,将电磁铁41设于焊接机器人40的末端处;
并于焊接机器人40的底部处设置一回收盒,在焊接机器人40通过电磁铁41吸附磁性基板时,焊接机器人40将所吸附的磁性基板放置于回收盒内。具体地,焊接机器人40在吸附到磁性基板之后,控制其末端移动到回收盒的上方,而后断开电磁铁41的电源,使得磁性基板能够在重力的作用下落入到回收盒内。
在本发明的一种具体实施方式中,焊接机器人40包括一控制系统;
在焊接机器人40的末端设置二维码读取装置42,将二维码读取装置42与控制系统连接;
通过二维码读取装置42扫描对应的二维码并获取得到焊接参数信息,二维码读取装置42将焊接参数信息发送给控制系统;
控制系统依据焊接参数信息进行调整并控制焊接机器人完成焊接作业。
焊接机器人40的控制系统能够控制焊接机器人40的末端的移动,该焊接机器人40的末端能够实现焊接作业。在进行焊接时,控制系统先控制焊接机器人40的末端移动到一焊接位置点处,而后通过其上的二维码读取装置42对磁性基板上的二维码进行扫描识别,以获取二维码中包含的焊接参数信息,而后该焊接参数信息发送给控制系统,控制系统根据该焊接参数信息进行调整,调整完成后进行自动焊接。
进一步地,焊接机器人沿所布设的钢筋的设置方向逐一的对焊接位置点进行焊接。
在另一较佳实施方式中,控制系统控制焊接机器人对钢筋骨架由上至下、由左至右依次的对焊接位置点进行焊接。
如图3所示,其显示了箱梁的钢筋骨架的结构,在对该箱梁的钢筋骨架进行焊接时,先依据钢筋骨架的设计图纸布设好钢筋,将钢筋固定在钢筋绑扎焊接台架上,通过钢筋绑扎焊接台架限位住钢筋,以确保在焊接作业过程中钢筋处于稳定状态,从而能够保证钢筋的焊接质量。接着根据该箱梁的钢筋骨架的设计图纸,划分钢筋焊接中各个焊接位置点的焊接参数信息,焊接参数信息包括有焊接角度信息、焊接长度信息以及焊接电流信息,根据焊接参数信息制作对应的二维码并将二维码喷涂在磁性基板上,接着将该磁性基板吸附在钢筋的焊接位置点处,在完成所有的磁性基板的吸附固定之后,利用焊接机器人对钢筋的焊接位置点进行焊接作业,焊接机器人移动到钢筋骨架的设置位置处,而后通过其末端处设置的二维码读取装置扫描识别二维码,获得该二维码内的焊接参数信息,而后根据焊接参数信息调整对应的焊接参数,接着进行焊接作业,在焊接完成后,焊接机器人移动到刚刚扫描识别的磁性基板处,通过电磁铁将该磁性基板回收,这样就完成了一个焊接位置点处的焊接作业。接着重复该步骤,直至完成所有的焊接位置点的焊接作业。
本发明的施工方法通过磁性基板制作包含焊接参数信息的二维码,既能够对焊接位置起到快速定位的作用,又能够实现不同焊接位置的焊接参数的标识,从而达到可以焊接复杂钢筋骨架的目的。解决了现有焊接机器人实用性差的问题,实现了复杂钢筋骨架的自动焊接。
本发明的施工方法可以实现利用机器人对复杂钢筋骨架进行焊接,改变以往复杂钢筋多采用人工焊接的施工方法,极大的提高了焊接的效率。此外,通过二维码扫描进行焊接位置的定位可以将焊接机器人的焊接应用场景由焊接钢筋网片扩充至焊接T梁、箱梁等复杂钢筋骨架,扩大焊接机器人的应用范围。
通过设置包含焊接参数的二维码,焊接机器人可以自动识别焊接参数信息,根据相应的参数要求进行焊接电流等参数的调节,可以从根本上避免由于人工焊接而导致的焊接质量问题。
以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
- 机器人焊接复杂钢筋骨架的施工方法
- 一种便于维护的焊接盖梁钢筋骨架的机器人