基于信息融合的电动车助力控制方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及电动车助力控制技术领域,具体是涉及一种基于信息融合的电动车的助力控制方法。
背景技术
近年些年来,电动自行车以绿色、环保、经济、便捷等特点,逐渐成为人们出行必不可少的交通工具。电动助力自行车逐渐进入大众的视线,它是一种“人力为主,电机为辅”的驱动方式,即通过骑行踩踏力矩与电机输出扭矩混合驱动行驶,既满足了健康环保的出行方式,又可以省时省力。
电动助力自行车作为一种新型的电动两轮车辆,以其“电动助力”的功能,在保持了传统自行车骑行轻便优点的同时,也能在起步、爬坡和顶风情况下达到省力的效果;其中,在遇到上坡路况或者载重变化的情况下,电机需要如何提供助力是一个显而易见的问题,助力比例的控制也就决定了骑行者的骑行舒适度。速度控制式比例助力控制方案将速度信号分析变换为电机控制器的输出控制信号,进而控制电机的输出功率,该方案的助力比例为1:1和1:2.5,通过手动进行分级调节,这种控制方式会出现明显的助力效果过弱或者过强的情况,在复杂路况下无法满足骑行者的助力要求。因此,如何在不同的路况下获得最优的助力比逐渐成为电动助力自行车的研究重点。
发明内容
为解决上述技术问题,本发明提供了一种基于信息融合的电动车的助力控制方法,根据路况来计算最优助力比,以解决现有电动助力车在上坡等复杂路况下助力效果不明显,骑行体验差的问题。
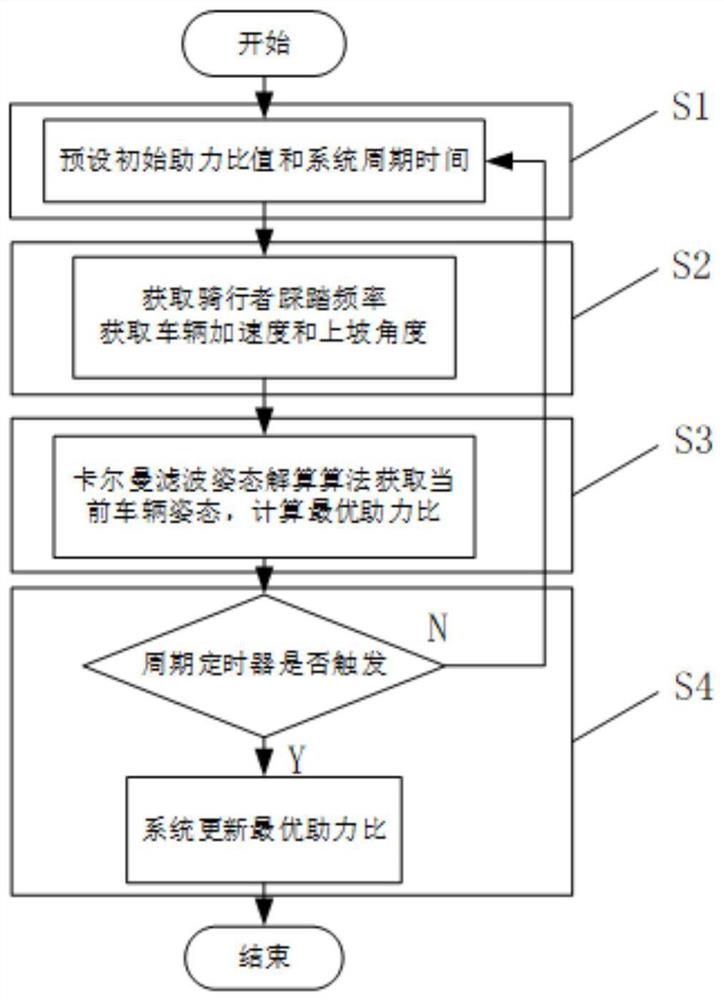
一种基于信息融合的电动车助力控制方法,其步骤为:
步骤1、预设初始助力比和软件系统周期时间;
步骤2、通过信息融合硬件系统获取骑行者踩踏频率,车辆加速度值和车辆姿态角;
步骤3、主控芯片对车辆当前的加速度值和车辆姿态进行数据分析,通过卡尔曼滤波姿态解算算法获取当前车辆姿态角,通过信息融合算法计算出对应当前车辆姿态的最优助力比;即车辆在某一路况下,最优助力比提供的助力效果相比较于其他助力比,有较强的跟随特性和良好的助力效果,该最优助力比由信息融合算法获得,使车辆在不同道路坡度、不同载重情况下可以获得较好的助力效果;
步骤4、完成一个系统周期后,若此时的实时助力比与上一个系统周期的助力比不同,则在下一个系统周期更新实时的最优助力比参数,若相同,则返回步骤2。
进一步的,所述步骤1中所述预设助力比值为1:1,所述系统周期时间为10ms。
进一步的,现有技术中电动车通常是通过速度的变化来估计加速度,准确性较低,本申请采用信息融合硬件系统来获取加速度;步骤2中,所述信息融合硬件系统包括霍尔速度传感器、三轴加速度仪、三轴陀螺仪,所述霍尔速度传感器、三轴加速度仪、三轴陀螺仪分别与主控芯片连接,通过霍尔速度传感器获取骑行者踩踏频率,通过三轴加速度仪获取车辆加速度值,通过三轴陀螺仪获取车辆姿态角,主控芯片进行数据分析从而判断车辆当前所处路况。
进一步的,步骤3中,通过卡尔曼滤波姿态解算算法获取当前车辆姿态角具体步骤为:
步骤3-1、进行初始对准,确定车辆坐标系相对地理坐标系的相对转动角度准确值,初始对准以后得到了初始的三个姿态角,计算初始的四元数,定义四元数误差为线性系统的状态向量,建立系统的状态方程;
步骤3-2、利用三轴加速度仪和三轴陀螺仪来计算初始姿态矩阵;
步骤3-3、利用初始姿态矩阵将理论值转换到载体系,分别计算载体系的理论值的分量,进而得到三轴加速度仪和三轴陀螺仪的估计值;
步骤3-4、查询当地重力和地磁的测量数据,通过三轴加速度仪和三轴陀螺仪的估计值及测量数据定义观测向量,进而建立观测方程,将系统的状态矩阵、观测矩阵、状态转移矩阵代入到卡尔曼滤波姿态解算算法模型中实现对姿态四元数的校准;
步骤3-5、将系统误差协方差和当前时刻的误差四元数最优估计值代入到卡尔曼滤波模型中,通过不断自归和迭代运算,求解每个时刻的最优估计值,获得当前车辆姿态角。
进一步的,所述四元数的计算方法为:使用四元数龙格库塔算法,选择状态变量为四元数误差Q
进一步的,所述系统的状态方程为:
X
其中Φ
所述状态矩阵为:
其中表示陀螺仪三轴估计值
进一步的,所述姿态矩阵为:
其中ψ,θγ,分别为航向角,俯仰角和横滚角,为简化记忆,用C
所述姿态角与姿态矩阵之间的公式为:
进一步的,所述加速度仪和陀螺仪的估计值为:
其中,
进一步的,所述系统的观测方程为:
其中
设置以上步骤的相关参数,带入模型中由四元数龙格库塔算法解算即可求得k时刻的误差四元数最优估计值:
其中q
进一步的,步骤3中,通过当前车辆姿态角计算助力比公式为:
其中,K
本发明所述的有益效果为:通过信息融合硬件系统获取车速、车辆姿态等参数进行自动调整助力比,适应各种路况下助力要求,满足复杂的人机协调和平滑调速的要求,保证电机和骑行者安全;本发明通过卡尔曼滤波姿态解算算法获取当前车辆姿态,通过信息融合算法实现助力比随骑行路况的改变而做出智能改变,提高了助力车的速度响应,优化了骑行感觉。
附图说明
为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明。
图1为本发明所述方法的结构框图;
图2为本发明中最优估计值
图3为本发明中助力电机的矢量控制框图。
具体实施方式
如图1所示,本发明所述的本发明提供了本发明提供了一种基于信息融合的电动车的助力控制方法,包括如下步骤:
步骤1、预设初始助力比和系统周期时间,在下一个系统周期内,控制系统的主控芯片会将初始助力比值更新为实时的助力比值;
步骤2、通过信息融合硬件系统获取骑行者踩踏频率,车辆加速度值和车辆姿态角;
步骤3、主控芯片对车辆当前的加速度值和车辆姿态进行数据分析,通过卡尔曼滤波姿态解算算法获取当前车辆姿态角,通过信息融合算法计算出对应当前车辆姿态的最优助力比,即车辆在某一路况下,最优助力比提供的助力效果相比较于其他助力比,有较强的跟随特性和良好的助力效果,该最优助力比由信息融合算法获得,使车辆在不同道路坡度、不同载重情况下可以获得较好的助力效果;
步骤4、在一个系统周期结束后,若此时的实时助力比与上一个系统周期的助力比不同,则在下一个系统周期更新实时的最优助力比参数,若相同,返回步骤2。
为提高采样精度,使用霍尔速度传感器,每踩一圈,传感器可以产生对应传动比个数的脉冲信号,这些脉冲信号源连接在单片机的计数器/定时器口,然后采取定时测脉冲的方法得到踩踏频率。
如图2所示,为状态方程最优估计值
如图3所示,为助力电机的矢量控制框图,包括转速环PI调节器、电流环PI调节器和SVPWM算法,使用i
所述步骤3中通过卡尔曼滤波姿态解算算法获取当前车辆姿态具体方法为:
在姿态解算之前进行初始对准,即确定车辆坐标系相对地理坐标系的相对转动角度准确值,利用三轴加速度仪和三轴陀螺仪来计算初始姿态矩阵,初始对准以后得到了初始的三个姿态角,进而能算出初始的四元数,这里定义四元数误差为线性系统的状态向量,建立系统的状态方程,利用初始姿态矩阵将理论值转换到载体系,分别计算载体系的理论值的分量,进而得到加速度仪和陀螺仪的估计值,然后通过估计值和测量值来定义观测向量,进而建立观测方程,将相应的参数代入到卡尔曼滤波姿态解算算法模型中实现对姿态四元数的校准,最终将输入量代入求解姿态角的最优估计值。
所述姿态矩阵为:
其中ψ,,θγ,分别为航向角,俯仰角和横滚角,为简化记忆,用C
所述姿态角与姿态矩阵之间的公式为:
根据系统k时刻的最优估计四元数
其中
结合以上公式可以得到所述加速度仪和陀螺仪的估计值为:
其中[0 0 g]
测量值和理论值之间的偏差为:
系统的观测向量Z
其中,a
Z
由上述公式可得系统的观测方程为:
其中
将设置好的输入量代入以上观测方程即可求得k时刻的误差四元数最优估计值为:
即可通过当前车辆姿态计算助力比,公式为:
其中K
以上所述仅为本发明的优选方案,并非作为对本发明的进一步限定,凡是利用本发明说明书及附图内容所作的各种等效变化均在本发明的保护范围之内。
- 基于信息融合的电动车助力控制方法
- 一种基于信息融合专家系统的电动助力转向系统控制方法