一种液压双足机器人一体化髋关节
文献发布时间:2023-06-19 18:27:32
技术领域
本发明属于液压双足机器人技术领域,尤其涉及一种液压双足机器人一体化髋关节。
背景技术
进入现代以来,腿足式机器人的研究受到了越来越多的关注。相比较轮式机器人,腿足式机器人有四个重要的特点。第一,机器人主体的运动可以在很大程度上独立于地形,在腿部的运动学约束范围内,腿部为主体提供了一个主动悬架系统,在一定程度上实现了机器人主体运动与所处环境地形之间的解耦,而轮式机器人的主体悬架则更多受限于地形,从而限制了其活动空间和能够完成的任务种类。第二,这种解耦使得机器人可以在一定程度上主动控制地面接触力的大小和方向,从而实现质心运动的主动控制,并且完成各种各样复杂的肢体动作。第三,这种解耦允许单条或多条腿暂时离开与地面的接触,使得机器人可以利用不连续的孤立立足点进行避障或跳跃式行进。第四,利用腿足的末端传感器,可以对机器人目前所受的外部力进行充分有效的感知,便于实现本体运动状态的预判与控制。这四个特点使得腿足式机器人能够适应各种崎岖的地形和人造城市环境,真正走进自然环境和人类社会,来完成各种较为复杂的任务。
对于腿足式机器人,髋关节的重要性不言而喻,和人类一样,双足机器人的髋关节需要能够实现俯仰、滚转和偏航三个自由度的动作,高集成性对于髋关节设计的重要性不言而喻,这也注定了髋关节的重要性。目前,已有的双足机器人均采用串联式髋关节,其可以简单地实现三个自由度的解耦。
但是,串联式髋关节所需空间较大,器件数量较多,驱动模式为线性驱动,进而会导致髋关节动作时所需的空间较大,限制了液压驱动腿足式机器人的小型化发展。
发明内容
本发明的目的是提供一种液压双足机器人一体化髋关节,简化了结构设计,缩小了髋关节的占用空间以及所需的动作空间。
本发明采用以下技术方案:一种液压双足机器人一体化髋关节,包括腰部桁架,腰部桁架为框架结构,其内部空间安装有用于分别控制机器人左腿和右腿的两套偏航调节机构;
每套偏航调节机构均依次通过对应的滚转调节机构和俯仰调节机构连接机器人的大腿结构;
滚转调节机构包括竖向设置的滚转液压缸,滚转液压缸内设置有可上下移动的驱动块,滚转液压缸的侧壁上与驱动块对应的位置上开设有对称设置的通孔;
驱动块开设有固定孔,固定孔内安装有滚转横轴,滚转横轴的另一端伸出腰部桁架,且滚转横轴的另一端与俯仰调节机构转动连接;
其中,滚转液压缸用于带动驱动块在其内部空间内上下运动。
进一步地,滚转横轴横向设置,且其上设置有纵向通孔,纵向通孔内穿设有纵向固定轴。
进一步地,纵向固定轴的两端固定在滚转固定架上;
滚转固定架位于横向的两个侧面为敞口,两个敞口用于供滚转横轴穿过。
进一步地,滚转固定架的上端和下端均设置有竖向的支杆;
两个支杆的另一端分别通过偏航轴承与腰部桁架的顶端和底端转动连接。
进一步地,两个支杆中的一个支杆上设置有纵向设置的连接杆,连接杆的另一端转动连接偏航液压缸,偏航液压缸横向设置、且另一端与腰部桁架转动连接。
进一步地,俯仰调节机构包括间隔设置在滚转横轴上的两个滚转轴承,两个滚转轴承分别通过连接板连接至大腿结构的左右两侧;
大腿结构的内侧具有竖向凹槽,凹槽内安装有俯仰液压缸,俯仰液压缸在大腿结构前后方向倾斜,俯仰液压缸的输出端固定安装有俯仰耳板,俯仰耳板与滚转横轴之间通过俯仰连杆连接。
进一步地,俯仰连杆与俯仰耳板转动连接;
俯仰连杆与滚转横轴转动连接。
进一步地,滚转横轴、纵向固定轴和支杆上均安装有转动角度测量装置。
进一步地,两个偏航液压缸的输出端朝向相对。
进一步地,在滚转横轴的外周上、且与纵向通孔对应的位置处环绕设置有连接块。
本发明的有益效果是:本发明通过将偏航调节机构、滚转调节机构均置入腰部桁架内部空间中,同时将俯仰调节机构置入大腿结构中,可以缩小三个自由度调节机构的占用空间大小,通过将三者相互关联设计,将机器人髋关节的三个自由度转动的驱动轴合三为一,大大减小了髋关节实现同样功能所需的体积,同时降低了腿部动作时三个自由度调节机构所需的动作空间,简化了结构设计,利于腿足式机器人的小型化。
附图说明
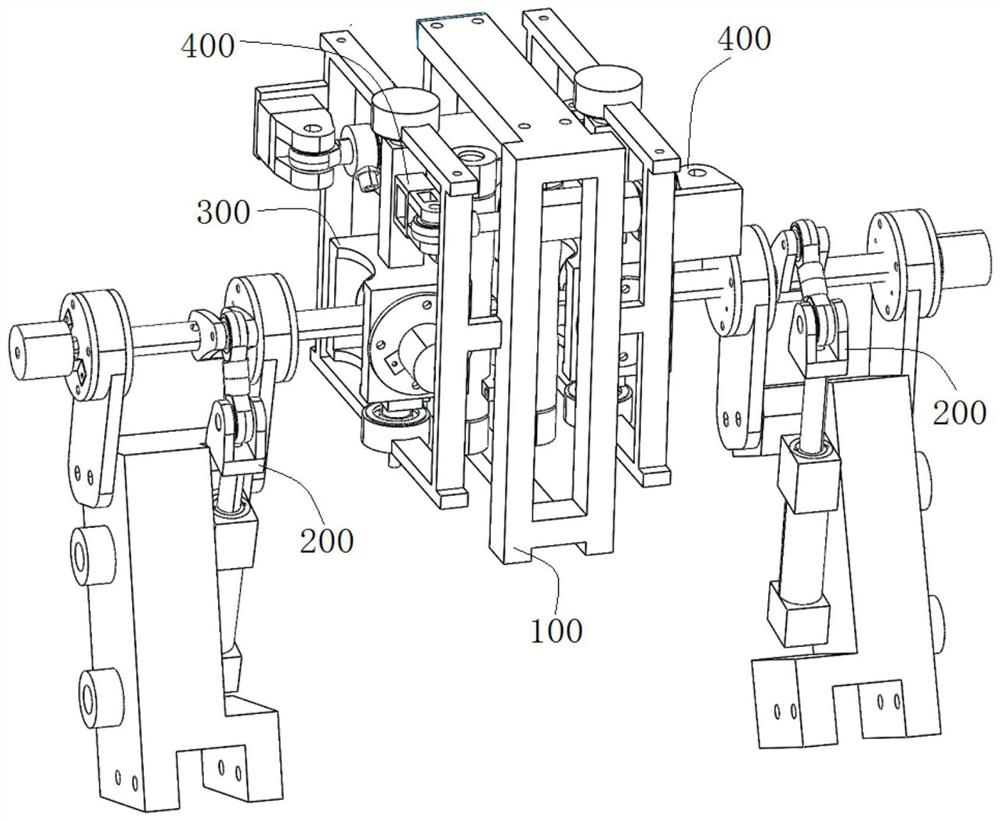
图1为本发明实施例一种液压双足机器人一体化髋关节的结构示意图;
图2为本发明实施例不包含腰部桁架时的结构示意图;
图3为本发明实施例中滚转调节机构和偏航调节机构的结构示意图;
图4为本发明实施例中俯仰调节机构和滚转调节机构的结构示意图;
图5为本发明实施例中滚转调节机构的结构示意图;
图6为本发明实施例中俯仰调节机构的结构示意图。
其中:100.腰部桁架;
200.俯仰调节机构;210.俯仰液压缸;220.俯仰耳板;230.俯仰连杆;
300.滚转调节机构;310.滚转液压缸;311.驱动块;320.滚转横轴;321.连接块;330.滚转轴承;340.滚转固定架;350.纵向固定轴;
400.偏航调节机构;410.偏航耳板;420.偏航液压缸;430.连接杆;440.偏航轴承;450.支杆。
具体实施方式
下面结合附图和具体实施方式对本发明进行详细说明。
本发明实施例公开了一种液压双足机器人一体化髋关节,如图1所示,包括腰部桁架100,腰部桁架100为框架结构,其内部空间安装有用于分别控制机器人左腿和右腿的两套偏航调节机构400;每套偏航调节机构400均依次通过对应的滚转调节机构300和俯仰调节机构200连接机器人的大腿结构。
如图4所示,滚转调节机构300包括竖向设置的滚转液压缸310,滚转液压缸310内设置有可上下移动的驱动块311,滚转液压缸310的侧壁上与驱动块311对应的位置上开设有对称设置的通孔;驱动块311开设有固定孔,固定孔内安装有滚转横轴320,滚转横轴320的另一端伸出腰部桁架100,且滚转横轴320的另一端与俯仰调节机构200转动连接;其中,滚转液压缸310用于带动驱动块311在其内部空间内上下运动。
本发明通过将偏航调节机构、滚转调节机构均置入腰部桁架内部空间中,同时将俯仰调节机构置入大腿结构中,可以缩小三个自由度调节机构的占用空间大小,通过将三者相互关联设计,仅以降低腿部动作时三个自由度调节机构所需的动作空间,简化了结构设计,利于腿足式机器人的小型化。
另外,本发明相比于目前公开的机器人设计而言,将机器人髋关节的三个自由度转动的驱动轴合三为一,大大减小了髋关节实现同样功能所需的体积,如图4所示,支杆450、纵向固定轴350和滚转横轴320为三种动作的转动主轴,进而使得整个外框架为集成机构,对于每个机器人大腿均具有单独的俯仰调节机构200、滚转调节机构300和偏航调节机构400,两个大腿的三自由度调节机构对称放置,位置设计合理,大大降低了空间占用度。
在本发明实施例中,偏航调节机构400用于调节大腿结构在前后方向上的偏移距离,滚转调节机构300用于调节大腿结构在上下方向上的偏转距离,俯仰调节机构200用于调节大腿结构在前后方向的偏转角度。
同时,在本发明中,横向指的是贯穿沿机器人的左右方向,纵向指的是贯穿机器人的前后方向,竖向指的是贯穿机器人的上下方向。另外,本发明中的偏航液压缸420、滚转液压缸310和俯仰液压缸210均为液压缸,其限定词“偏航”、“滚转”和“俯仰”是用来表示其在技术方案中所起的作用,也就是说偏航液压缸420是用来调节偏航角度的液压缸,滚转液压缸310是用来调节滚转角度的液压缸,俯仰液压缸210是用来调节俯仰角度的液压缸。
液压缸动作所需的油液存储于油箱,由泵提供高压液压油,为了压力稳定兼顾系统安全,泵出口设置了溢流阀,短时大流量情况下利用蓄能器进行补油,以保持压力的恒定。驱动执行机构的液压缸由伺服阀进行方向和运行速度的控制,液压回路中设置了冷却器使油液的工作温度始终保持在一定范围内,同时设置了油滤以保持液压油的清洁。
在一个实施例中,如图5所示,滚转横轴320横向设置,且其上设置有纵向通孔,纵向通孔内穿设有纵向固定轴350,纵向固定轴350的两端固定在滚转固定架340上;而且,滚转固定架340位于横向的两个侧面为敞口,两个敞口用于供滚转横轴320穿过。
通过滚转液压缸310与滚转横轴320的固定,当滚转液压缸310内的驱动块311上下运动时,可以带动滚转横轴320上下运动,同时,如图5所示,由于纵向固定轴350的存在,其作为了滚转横轴320转动时的中心处,可以带动俯仰调节机构200和大腿结构在上下方向上产生运动距离,实现大腿结构在滚转自由度调节。作为具体的实现方式,可以在纵向固定轴350的外周上安装轴承,将轴承安装在纵向通孔内。
另外,为了增加滚转横轴320的强度,在滚转横轴320的外周上、且与纵向通孔对应的位置处环绕设置有连接块321。由于滚转横轴320同时带动了滚转调节机构300和俯仰调节机构200,甚至还带动了机器人的整个腿部重量,所以该连接处受力非常大,通过连接块321的设置,可以使得滚转横轴320与纵向固定轴350的连接处更加牢固,避免滚转横轴320在该部位发生断裂的情况。
具体的,滚转固定架340的上端和下端均设置有竖向的支杆450;两个支杆450的另一端分别通过偏航轴承440与腰部桁架100的顶端和底端转动连接。通过这样设置,可以通过转动支杆450来带动滚转固定架340在前后方向转动,当其转动式,由于滚转横轴320与纵向固定轴350在该方向上并不存在相对转动关系,所以,当滚转固定架340转动时会带动滚转横轴320同时转动,从而实现了大腿结构在前后方向上的运动。
关于偏航角度的驱动问题,如图3所示,本实施例中两个支杆450中的一个支杆450上设置有纵向设置的连接杆430,连接杆430的另一端转动连接偏航液压缸420,偏航液压缸420横向设置、且另一端与腰部桁架100转动连接。更为具体的,偏航液压缸420横向设置在腰部桁架100上,其另一端连接偏航耳板410,偏航耳板410纵向设置且与腰部桁架100固定连接。
作为一种具体的实现方式,偏航液压缸420的两个连接端均转动连接,这样可以增加装置的容错,对各个部件进行保护,提升保护寿命。
在本发明实施例中,如图2所示,由于具有两套偏航调节机构400,且都安装在腰部桁架100内部空间中,所以,为了节省空间,两个偏航液压缸420的输出端朝向相对,进而可以分别连接左右腿。
在一个实施例中,如图6所示,俯仰调节机构200包括间隔设置在滚转横轴320上的两个滚转轴承330,两个滚转轴承330分别通过连接板连接至大腿结构的左右两侧。同时,大腿结构的内侧具有竖向凹槽,凹槽内安装有俯仰液压缸210,俯仰液压缸210在大腿结构前后方向倾斜,俯仰液压缸210的输出端固定安装有俯仰耳板220,俯仰耳板220与滚转横轴320之间通过俯仰连杆230连接。通过将俯仰液压缸210安装在竖向凹槽中,可以将其融合到大腿结构内部,一方面节省了安装空间,另一方面也可以对液压缸进行保护。
基于同样的原理,俯仰连杆230与俯仰耳板220转动连接;俯仰连杆230与滚转横轴320转动连接,以便于大腿结构动作更加平滑。
在一个实施例中,滚转横轴320、纵向固定轴350和支杆450上均安装有转动角度测量装置,这样可以分别测量在三个自由度方向上的旋转角度,利于整体控制。
综上,实现可仿人双足机器人髋关节的体积更小、控制响应更快的要求。设计的串并联混合髋关节,实现了髋关节偏航自由度和俯仰自由度的并联控制,以及偏航自由度和俯仰自由度的并联控制实现。
本发明的结构特别适用于液压驱动式仿人双足机器人的髋关节,核心在于髋关节采用了滚转液压缸310,相比于传统液压缸直接减小了关节占用空间的大小;同时在结构设计中实现了两个自由度的并联控制,从而去从而大大节省结构占用空间,大大减小了髋关节动作控制的延时情况。
也就是说,本发明公开的集成式液压驱动式仿人双足机器人髋关节,减小了关节占用空间的大小,同时在结构设计中实现了髋关节三个自由度的串并联混合设计,从而大大节省结构占用空间,大大减小了髋关节动作控制的延时情况,实现了紧凑化、一体化设计,大大减少了过去液压驱动式机器人关节设计上的繁冗,以及液压驱动模块安装时质量过重对机器人关节运动造成负面影响的问题。
- 一种双足机器人爬楼梯步态规划方法、装置及机器人
- 一种双足四足一体化可实时切换足式机器人
- 一种双足四足一体化可实时切换新型足式机器人