一种样本不平衡下的飞机群组意图识别方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明属于飞机群组意图识别技术领域,具体地涉及一种样本不平衡下的飞机群组意图识别方法。
背景技术
二战以来,随着军事信息化的推进和科学技术的发展,以预警机为核心枢纽的信息化作战体系逐渐成型。空中作战形式也从单一作战单元间的对抗转变为飞行群组间的对抗。飞机群组的作战行动是影响战场态势的关键。然而战场环境也随之复杂化,指挥员很难依靠经验实时准确地判断出敌方群组的真实意图。因此需要一种智能化的方法来快速准确地识别敌方群组的意图,以辅助指挥员做出决策。
对于识别战场目标意图问题,传统的方法主要有模板匹配、专家系统、灰色关联、贝叶斯网络等,总体思路是先根据领域专家的先验知识构建知识规则库或贝叶斯网络,然后通过目标的状态特征进行意图识别,但传统方法过度依赖于先验知识,不适用于复杂多变的战场环境。而随着人工智能的发展、深度学习的应用,使机器能更快速处理大量复杂的数据。近年来,神经网络方法
以上研究都是在训练数据集中各个类别的样本数量相对平衡的情况下进行的,多数类样本和少数类样本的数量相差不大。然而在军事指控领域中,真实战场数据往往存在着样本间的不平衡,比如敌方佯攻的样本通常比攻击的多。样本集的不平衡会导致模型很难从少数类样本中提取到有用的信息,使模型的训练过拟合,识别结果偏向样本量较多的一方。目前对于不平衡样本情况下的目标意图识别的研究还较少,所以针对不平衡样本下的飞机群组意图识别的研究具有实际意义。
目前解决样本不平衡问题方法大致可分为三类,欠采样、过采样和混合方法。在这三种方法中,由于欠采样会减少多数类样本的数量,导致重要信息丢失,混合方法中也存在同样的问题,因此过采样的使用频率更高。有学者通过比较ROC曲线下的面积(AUC),证明了过采样方法比欠采样表现更好,其中合成少数过采样技术(synthetic minorityoversampling technique,SMOTE)被认为是处理不平衡问题较好的数据预处理方法。基本思想是通过在相邻少数类样本间进行插值来平衡原始训练数据,以增加少数类样本的数量来提高了分类器的性能。但是对于较复杂的样本集,SMOTE通过简单增加少数类样本无法体现少数类特征信息,很难得到较好的结果。
发明内容
针对上述存在的飞机群组样本不平衡以及大多数意图识别模型准确率不高、训练效率低等问题,本发明提出一种样本不平衡下的飞机群组意图识别方法,设计了一种面向无序分类变量和连续变量的自适应边界合成少数过采样技术ABSMOTE-NC(adaptiveborderline-synthetic minority oversampling technique-nominal continuous)算法,基于注意力机制的双向门控循环单元(Bidirectional Gated Recurrent Unit Based onAttention,BiGRU-Attention)网络的意图识别模型。首先,对于不平衡的样本采用ABSMOTE-NC的方法对少数类样本进行扩充;其次,将扩充后的数据集输入到BiGRU层,综合前后时刻信息的特征提取;然后输入到注意力层,对多维特征进行深层次提取,提高对关键特征的关注度;最终通过softmax函数层输出判断的意图。将本文方法与多种方法进行对比,以准确率、精确率、召回率、AUC、F1-score及其算数平均marco-F1值作为评估指标,证明本文提出的方法能有效提升飞机群组意图识别的效果。
为了实现上述目的,本发明所采用的技术方案如下:
一种样本不平衡下的飞机群组意图识别方法,包括:
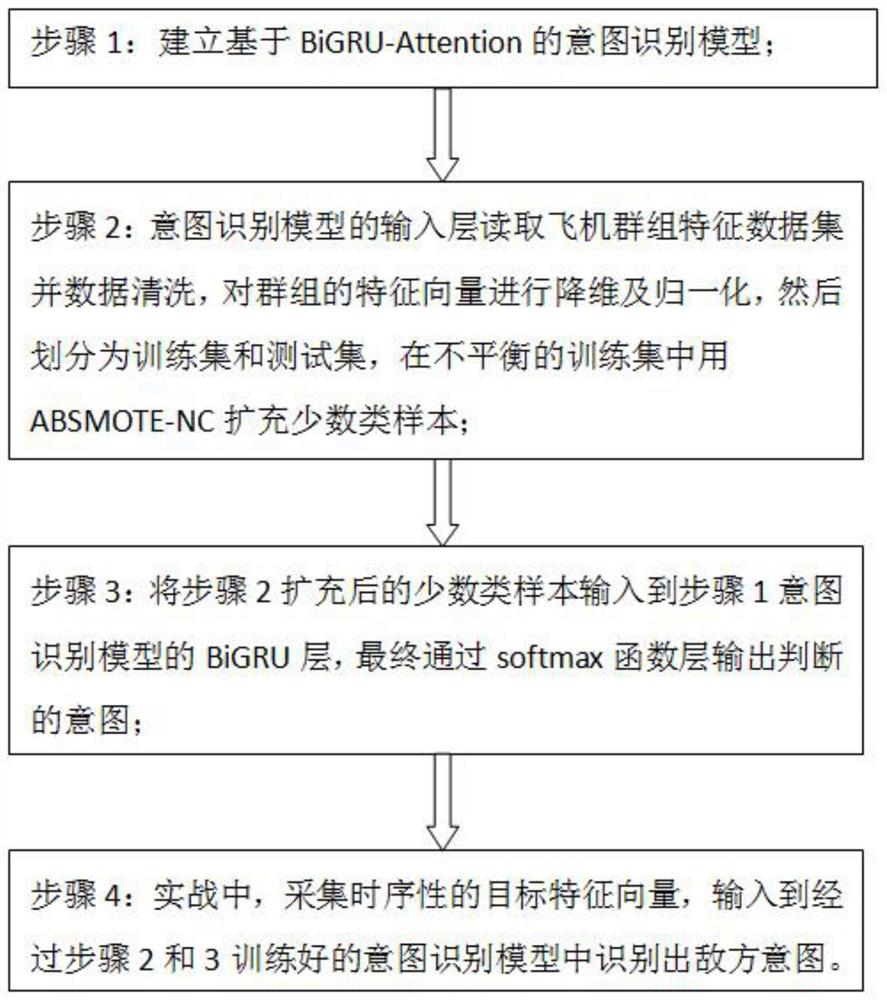
步骤1:建立基于BiGRU-Attention的意图识别模型,意图识别模型包括输入层、隐含层和输出层,隐含层由BiGRU层、注意力层和全连接层组成;
步骤2:意图识别模型的输入层首先读取飞机群组特征数据集并进行数据清洗,对飞机群组的特征向量进行降维及归一化处理,然后将处理后的数据随机初始化,按8:2划分为训练集和测试集,最后在不平衡的训练集中用ABSMOTE-NC扩充少数类样本;
步骤3:将步骤2扩充后的少数类样本输入到步骤1意图识别模型的BiGRU层,综合前后时刻信息的特征提取;然后输入到注意力层,对多维特征进行深层次提取,提高对关键特征的关注度;最终通过softmax函数层输出判断的意图;
步骤4:在实际的战场环境中,通过传感器采集时序性的目标特征向量,经预处理后输入到经过步骤2和3训练好的意图识别模型中识别出敌方意图。
优选的,所述步骤2中降维具体为:
假设单个飞机群组中有m架飞机,其中单机的n维特征向量为v
优选的,所述步骤2中归一化具体为:
对速度、加速度、高度、距离、航向角、方位角、雷达反射面积共7种数值型数据进行归一化处理,对于第k种数值型特征数据N
其中,min N
对目标机动类型、干扰状态、对空雷达状态、对海雷达状态共4种非数值型分类数据,将其数值化处理,转变到[0,1]区间内,对于第r种非数值型数据B
优选的,所述步骤2的初始化具体为:以飞机群组为对象,将意图空间定义为攻击、佯攻、撤退、侦察、监视、电子干扰6种模式,将6种模式进行编码,与{0,1,2,3,4,5}标签值相对应。
优选的,步骤2所述在不平衡的训练集中采用ABSMOTE-NC方法对少数类样本进行扩充具体包括:
步骤2.3.1:定义飞机群组意图样本集中少数类样本集为P={p
步骤2.3.2:对于DANGER={p
步骤2.3.3:计算比率r
步骤2.3.4:计算每个p
步骤2.3.5:在p
p
步骤2.3.6:对于样本中的非数值型的特征值,选择K近邻中出现频率最高的值作为生成少数类新样本p
优选的,所述步骤3的BiGRU层具体为:
BiGRU层的中下层是按时间顺序,上层是按时间逆序,在t时刻的隐层状态y
其中,W
优选的,所述步骤3意图识别模型的注意力层为:
将BiGRU层输出的每个隐藏层状态作为注意力层的输入,注意力打分函数采用加性模型,得到注意力分布,最后用加权平均的方式进行汇总,得到注意力值作为输出的状态向量,注意力机制的模型结构计算公式如下:
s
式中:s
优选的,所述步骤3意图识别模型的输出层为:
输出层通过softmax函数将注意力机制的输出转变成分类的概率,从而对群组特征数据进行意图识别,具体公式为:
c
式中:W
与现有技术相比,本发明的有益效果是:
1.在模型训练过程中利用ABSMOTE-NC算法扩充训练集中的少数类样本,能够有效解决训练集样本不平衡导致模型分类不准确的问题;
2.模型在基于GRU网络的基础上引入双向循环机制,能够充分结合历史和未来时刻的信息,从而挖掘出飞机群组目标时序特征中的深层信息,使意图识别过程更加科学合理;
3.在模型隐含层利用注意力机制为BiGRU提取的深层信息分配权值,模拟了人类的视觉注意力,以提高网络捕捉更具区分度特征的能力,能有效提升模型识别效果和训练效率。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
在附图中:
图1为本发明的方法流程图;
图2为群组意图识别的特征空间;
图3为BiGRU-Attention模型结构;
图4为GRU的循环单元结构;
图5为BiGRU结构;
图6为注意力机制模型结构;
图7为不同过采样算法的评估指标对比;
图8为模型的评估指标对比;
图9为模型准确率变化情况;
图10为消融实验模型评估指标对比。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
实施例:
飞机群组意图识别是在实时动态、对抗的战场环境中,通过传感器采集到的飞机群组的状态信息,依靠军事领域知识进行分析识别其意图的过程。敌方群组的作战意图通常表现在作战行动上,而机群在执行作战任务过程中会在目标速度、加速度、机动类型、雷达信号等状态特征上呈现出一定的规律,由此可以通过各种传感器获得的状态数据识别出敌方的意图。
在真实战场中,由于双方都有丰富的军事经验,敌方机群可能会采取一些欺骗性的行动以隐藏真实意图,因此仅通过单一时刻的群组状态识别其意图会影响识别结果的准确性
在识别飞机群组的意图过程中,首先将带有标签的战场历史数据库经过数据预处理后进行划分训练集和测试集,在不平衡的训练集中用ABSMOTE-NC扩充少数类样本,再用扩充后的数据集训练BiGRU-Attention网络。在实际的战场环境中,通过各类传感器采集时序性的目标特征向量,经预处理后输入到训练好的模型中就能识别出敌方意图。
意图空间的选取与作战形式、地点、规模等因素密切相关,在不同的战场背景下通常有不同的作战意图。敌方群组会根据目标的重要程度选择不同的作战意图,同时也会随战场情况实时调整行动意图。因此,需要根据实际作战背景选取意图空间。本文针对飞机群组目标,依据领域专家经验,选取的意图空间为{攻击、佯攻、撤退、侦察、监视、电子干扰}。
飞机群组的意图通常与其作战任务有关,而群组为执行特定的作战任务,通常会受限于飞机性能和任务需要,在某些特征信息上表现出来。比如侦察群组为了躲避地面雷达探测,往往根据战场情况针对性选择飞行高度;攻击意图的群组也会根据武器挂载情况适时调整飞行速度。因此将飞机群组的飞行速度、飞行加速度、高度、距离、雷达反射面积等作为其意图识别的特征。而且群组的意图与目标雷达状态也有关,例如,执行轰炸任务的飞机只在轰炸时开启对空或对海雷达。
群组在作战行动中通常需要一系列战术机动动作,因此群组的机动类型也与其意图有关。本文以飞机群组研究对象,实现高机动的难度较大,所以本文选取11种基本操纵动作作为群组的机动类型,具体为{匀速前飞、加速前飞、减速前飞、左转、右转、爬升、左爬升、右爬升、俯冲、左俯冲、右俯冲}。
综上,本实施例对于飞机群组意图识别问题建立的特征空间为{飞行速度、飞行加速度、高度、距离、航向角、方位角、雷达反射面积、机动类型、干扰状态、对空雷达状态、对海雷达状态}。将特征空间分为数值型和非数值型,如图2所示。
参照附图1和3-10所示,一种样本不平衡下的飞机群组意图识别方法,
步骤1:为提高意图识别模型对历史时刻和未来时刻状态信息的利用率,在GRU基础上引入双向循环机制,同时利用注意力机制为各个深层信息分配权重,以提高模型捕捉更具区分度特征的能力。建立基于BiGRU-Attention的意图识别模型,如图3所示,意图识别模型包括输入层、隐含层和输出层,其中隐含层由BiGRU层、注意力层和全连接层组成。
步骤2:首先读取飞机群组特征数据集并进行数据清洗,对群组的特征向量进行降维及归一化处理,然后将处理后的数据随机初始化,按8:2划分为训练集和测试集,最后在不平衡的训练集中用ABSMOTE-NC扩充少数类样本。步骤2具体为:
步骤2.1:降维与归一化:
飞机群组为了实现某一作战意图,在作战行动中各架飞机状态特征大多保持相同或相似。但将所有特征数据都作为神经网络输入会影响网络收敛效率,增加模型训练时间和存储空间。因此先将群组中m架飞机的n维特征向量降维,再输入到模型中。
假设单个群组中有m架飞机,其中单机的n维特征向量为v
数据归一化能够消除量纲的影响,使数据处于同一数量级,同时能提高模型收敛效率和精度。本实施例对速度、加速度、高度、距离、航向角、方位角、雷达反射面积共7种数值型数据进行归一化处理,对于第k种数值型特征数据N
其中,min N
对目标机动类型、干扰状态、对空雷达状态、对海雷达状态共4种非数值型分类数据,将其数值化处理,转变到[0,1]区间内,对于第r种非数值型数据B
步骤2.2:初始化:
以飞机群组为对象,将意图空间定义为攻击、佯攻、撤退、侦察、监视、电子干扰6种模式,将6种模式进行编码(one-hot),与{0,1,2,3,4,5}标签值相对应。将编码后的标签值输入到模型中训练,得到的模型运用到实际战场中时,通过输出的标签值与意图空间的对应关系,就可以得到识别出的群组意图。
步骤2.3:少数类样本集扩充
由于战场中战术安排的需要,不同意图的战术群组在数量上存在较大差异,因此真实战场的样本存在不平衡性,而利用不平衡的样本训练时会导致模型对少数类样本的识别准确率较低。为了模型能更准确识别各个意图,本文首先对少数类样本不足的情况进行新样本合成。
边界合成少数过采样技术(Borderline-Synthetic Minority OversamplingTechnique,Borderline-SMOTE)针对少数类样本边界合成新样本,但对于样本边界而言,也存在分类难易问题,且样本合成数量也难以确定,无法处理非数值型数据。
因此,本实施例提出ABSMOTE-NC扩充少数类样本集。在原方法的基础上引入自适应的思想以确定边界样本合成数量,根据样本间交叉程度以及多数类样本数量确定需要合成的少数类样本数目。所述在不平衡的训练集中采用ABSMOTE-NC方法对少数类样本进行扩充,具体包括:
步骤2.3.1:定义飞机群组意图样本集中少数类样本集为P={p
步骤2.3.2:对于DANGER={p
步骤2.3.3:计算比率r
步骤2.3.4:计算每个p
步骤2.3.5:在p
p
步骤2.3.6:对于样本中的非数值型的特征值,选择K近邻中出现频率最高的值作为生成少数类新样本p
步骤3:利用步骤2扩充后的少数类样本输入到步骤1意图识别模型的BiGRU层,综合飞行速度、飞行加速度、高度等特征的前后时刻信息,提取其时序上的深层信息;然后输入到注意力层,为每个特征分配权重,提高关键特征的关注度,例如飞机群组意图为攻击时,注意力层就会为飞行速度、高度等特征分配更高的权值;最终通过softmax函数层输出判断的意图。
BiGRU层具体为:
对于飞机群组的意图识别问题,快速准确的得到敌方意图是我方制胜的关键。现有方法中循环神经网络被证明能有效提升意图识别准确率,但长短期记忆(long shortterm memory,LSTM)网络的结构较复杂,参数较多,训练时间较长,因此本实施例采用比LSTM更精简的GRU网络。GRU网络引入门控机制来控制信息更新,保留了LSTM的效果,且结构更为简单、参数更少、模型收敛性更好。GRU网络中的循环单元结构如图4所示。图中:x
GRU的更新方式如下:
r
z
h
h
其中W
由于单向的GRU只能提取当前时刻之前的信息,无法学习之后的信息与当前时刻的关系。为了从飞机群组的时序特征中提取深层次的信息,引入双向循环机制,使BiGRU网络在意图识别上获得更高的准确率。其按时间展开的模型如图5所示。
BiGRU层的中下层是按时间顺序,上层是按时间逆序,在t时刻的隐层状态y
其中,W
所述步骤3意图识别模型的注意力层为:
为使网络能更关注飞机群组特征中的关键信息,提高识别准确率,本文在BiGRU层后引入注意力机制。将BiGRU层输出的每个隐藏层状态作为注意力层的输入,注意力打分函数采用加性模型,得到注意力分布,最后用加权平均的方式进行汇总,得到注意力值作为输出的状态向量,注意力机制的模型结构如图6所示。注意力机制的模型结构计算公式如下:
s
式中:s
所述步骤2意图识别模型的输出层为:
输出层通过softmax函数将注意力机制的输出转变成分类的概率,从而对群组特征数据进行意图识别,具体公式为:
c
式中:W
步骤4:在实际的战场环境中,通过传感器采集时序性的目标特征向量,经预处理后输入到步骤3训练好的意图识别模型中识别出敌方意图。
仿真实验分析
1实验环境及参数设置
1.1实验以某空域群组为研究目标,实验数据从某作战仿真平台获得。通过多次运行仿真系统,得到多种意图下的飞机群组样本,从中选取8000个飞机群组意图样本,每个样本中包含一个群组(每个群组包含2-5架飞机)连续12帧的状态信息(每帧信息包括方位角、航向角、飞行速度、飞行加速度等11维特征数据)。由于样本集数据量过大,先由领域专家依据经验知识编写群组意图识别的相关规则,再通过计算机对样本集进行分类,最后由领域专家为识别出的意图与认知经验存在歧义的样本进行修订。为了模拟样本间的不平衡,选取的样本集中各意图占比为侦察意图50.00%、电子干扰意图25.18%、佯攻意图12.91%、撤退意图8.26%、监视意图2.48%、攻击意图1.18%。样本规模为8000,其中侦察意图与攻击意图样本数之比超过40。
本实验采用Python语言,学习框架为Keras,运行环境为Pycharm2021软件、Win10系统、RTX2060显卡、16GB内存。模型评估指标选用机器学习常用的精确率、召回率、F1-score(模型精确率和召回率的调和平均)及其算数平均macro-F1。由于本文针对的是不平衡样本下的意图识别问题,而且更关注少数类的攻击、监视意图的样本,因此将受试者工作特征曲线(Receiver Operating Characteristic Curve,ROC)下方的面积AUC(Area UnderCurve)也作为评估指标。ROC曲线是以假正例率(意图识别错误的负样本数占实际的负样本数的比例)为坐标横轴、以真正例率(意图识别正确的正样本数占实际的正样本数的比例)为坐标纵轴绘制的曲线。AUC取值在[0,1],AUC值越大,说明模型的分类效果越好。实验中需要设置并调整超参数,因此根据模型的macro-F1和AUC值,经过多次运行迭代,设置实验超参数如表1所示。
表1模型主要参数
2.仿真实验分析
2.1ABSMOTE-NC效果评估
(1)方法合理性验证实验
为保证ABSMOTE-NC生成样本的合理性,需验证合成样本和原始样本的相似性。对原始样本集中训练集和测试集分别使用ABSMOTE-NC扩充少数类样本,利用扩充后的训练集训练模型,将训练后的模型对扩充测试集中原始少数类样本和合成的少数类样本进行识别,具体结果如表2所示。
表2原始样本和合成样本比较
由表2可以看出模型对于原始样本和合成样本的识别准确率相近,说明合成样本与原始样本的相似性较高,验证了ABSMOTE-NC方法的合理性。
(2)识别结果对比
将飞机群组样本集划分训练集后直接输入模型训练,训练完成后对测试集样本进行测试,得到结果表明模型的准确率达到97.94%。但通过分析表3中的各意图间的混淆矩阵,可以看出模型对佯攻、侦察意图等多数类样本的识别率达到了100%,但对于攻击和监视意图样本的召回率较低,分别为60%和32.5%。经分析应是撤退和电子干扰意图的样本特征对比较明显,和样本比例关系不大;而对于特征状态相似的意图,攻击与佯攻、侦察与监视的样本不均衡使模型在训练过程中对少数类样本欠拟合,从而导致模型不能准确识别意图间的边界。
然而在真实战场中攻击和监视的群组对己方重要程度通常更大,因此为了使模型能更合理地确定少数类意图的边界,使用2.1中ABSMOTE-NC的方法对训练集中的少数类样本进行扩充,再对模型进行训练,得到的意图识别混淆矩阵如表4所示。由表可知,模型对攻击和监视意图的样本的召回率有了明显的提升,分别达到了86.67%和77.5%。
表3原始样本的意图识别混淆矩阵
表4扩充样本后的意图识别混淆矩阵
(3)与其他过采样算法对比
为了能更准确分辨模型的分类效果,除了使用准确率外,还引入macro-F1、AUC作为评估指标,以验证ABSMOTE-NC的优越性。将其与Random Oversampling、Borderline-SMOTE-NC、SMOTENC-ENN、SMOTENC过采样算法进行比较,具体结果如图7所示。
由图7可知通过过采样算法,ABSMOTE-NC在macro-F1和AUC值均有明显提升,分类效果有所改善。虽然SMOTENC-ENN和SMOTE-NC在准确率上不如原始数据,分析后应是合成新样本后意图边界靠近少数类中心而导致多数类样本识别率降低,但总体的分类效果还是优于原始数据。本文中ABSMOTE-NC方法得到的macro-F1和AUC值分别达到了0.9317和0.9814,相比原始模型分别提高了7.33%和8.61%,说明模型能较准确的划分边界区域,证明了算法的有效性和优越性。
2.2BiGRU-Attention模型对比分析
(1)与DNN、SAE、LSTM模型对比
为验证本文模型的优越性,将本文BiGRU-Attention模型与文献[10]中基于栈式自编码器的目标战术意图识别模型、文献[11]中基于深度神经网络的作战意图识别模型、文献[29]中LSTM+Adam空战意图识别模型进行对比实验。设置模型参数如表5,在对少数类样本集扩充后再利用各模型进行意图识别,实验结果如图8所示。
表5模型参数设置
由图9可知本文中BiGRU-Attention模型在macro-F1和AUC两个评估指标上明显高于其余模型,在意图识别上有更好的分类效果,验证了模型的优越性。
(2)消融实验
上节实验证明了相比LSTM、SAE、DNN等网络,BiGRU-Attention的分类效果更优越,但这些网络不属于同一类型且参数设置也不尽相同,导致实验缺乏一定的说服力。因此将本文BiGRU-Attention模型与GRU、BiGRU、GRU-Attention模型进行消融实验,实验结果如图9、图10、表6所示。
由图9可知本文所提BiGRU-Attention模型在训练过程中准确率始终优于GRU、BiGRU、GRU-Attention三种模型,能够有效提升意图识别效果,而BiGRU、GRU-Attention在训练中准确率均高于GRU模型,经分析后认为是模型中的双向循环机制和注意力机制能有效提升训练效果与学习效率。
表6消融实验各模型评估指标值
由表6可以看出由于攻击和监视意图的样本数较少,合成样本不能完全代替真实样本,且攻击与佯攻、监视与侦察的特征相似度又较高,导致攻击和监视意图样本的识别率不高。而BiGRU-Attention模型在大部分样本的精确率、召回率、F1-score上均高于其余三种模型,证明了本文模型能有效提升意图识别效果。由图10可知本文模型与其余模型相比,在macro-F1和AUC值上也都有明显的优势,也验证了模型在意图识别效果上的优越性。
结论:
本实施例针对飞机群组的真实样本不平衡而导致模型识别效果不佳的问题,提出了先扩充样本集训练后识别的方法。该方法先采用ABSMOTE-NC对训练集中少数类样本集进行扩充,增加样本空间中少数类意图的边界样本,再利用BiGRU-Attention模型对样本信息进行深层次特征提取,以提升模型意图识别的效果。最终通过仿真实验表明ABSMOTE-NC方法能有效提升样本不平衡情况下的飞机群组意图识别效果,且BiGRU-Attention模型在意图识别上有更高的识别率。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种样本不平衡下基于数据增强的轴承故障识别方法
- 一种样本不平衡下基于数据增强的轴承故障识别方法