一种物流卸货用自动码垛装置
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及码垛装置技术领域,尤其涉及一种物流卸货用自动码垛装置。
背景技术
码垛机是机、电一体化高新技术产品,中、低位码垛机可以满足中低产量的生产需要,可按照要求的编组方式和层数,完成对料袋、胶块、箱体等各种产品的码垛,最优化的设计使得垛形紧密、整齐,随着科学技术的飞速发展,自动码垛装置也得到了技术改进;
但一般的码垛机不便于进行移动,在移动位置后往往稳定性会降低,影响卸货时的稳定性,且一般的码垛机通常是单机械臂运行,码垛效率低,难以跟上传送带的输送效率进行作业。
发明内容
本发明的目的是为了解决现有码垛机不便于进行移动,在移动位置后往往稳定性会降低,影响卸货时的稳定性,且一般的码垛机通常是单机械臂运行,码垛效率低,难以跟上传送带的输送效率进行作业的缺点,而提出的一种物流卸货用自动码垛装置。
为了实现上述目的,本发明采用了如下技术方案:
一种物流卸货用自动码垛装置,包括底座,所述底座的底部设置有多个万向轮,底座的顶部固定设置有立柱,立柱的顶部开设有矩形滑槽,矩形滑槽内滑动安装有矩形柱,矩形柱的顶部固定连接有旋转座,旋转座的顶部转动设置有安装座,安装座的外侧对称设置有两个机械码垛臂,底座上设置有两组底座限位稳定机构。
优选的,所述底座限位稳定机构包括开设于底座内的安装腔,安装腔内转动安装有旋转轴,旋转轴的两端均延伸至底座的外侧并固定连接有支撑架,旋转轴可以带动支撑架翻转。
优选的,所述矩形滑槽与安装腔相互靠近的一侧开设有同一个旋转孔,旋转孔内转动安装有螺纹杆,矩形柱的底部开设有螺纹孔槽,螺纹杆的顶端螺纹安装于螺纹孔槽内,安装腔的底部内壁上固定安装有第一电机,螺纹杆的底端与第一电机的输出轴相焊接,螺纹杆可以通过螺纹孔槽带动矩形柱位移。
优选的,所述螺纹杆的外侧固定套设有第一蜗杆,安装腔内转动安装有第一旋转杆,第一旋转杆的外侧固定套设有第一蜗轮,第一蜗轮与第一蜗杆相啮合,第一蜗杆可以带动第一蜗轮转动并降低速率。
优选的,所述第一旋转杆的外侧固定套设有两个第二蜗杆,旋转轴的外侧固定套设有第二蜗轮,第二蜗轮与第二蜗杆相啮合,第二蜗杆可以带动第二蜗轮转动并降低速率。
优选的,所述旋转座的顶部开设有旋转槽,安装座转动安装于旋转槽内,旋转槽的内壁上开设有环形滑槽,环形滑槽内滑动安装有滑环,滑环固定套设于安装座的外侧。
优选的,所述旋转座的外侧固定安装有第二电机,旋转槽内转动安装有第二旋转杆,第二旋转杆的一端延伸至旋转座的外侧并与第二电机的输出轴相焊接,第二旋转杆的外侧固定套设有第三蜗杆,旋转槽内转动安装有第三旋转杆,第三旋转杆的外侧固定套设有第三蜗轮,第三蜗轮与第三蜗杆相啮合,第三蜗杆可以带动第三蜗轮转动并降低速率。
优选的,所述安装座的底部开设有凹槽,凹槽内设置有齿圈,第三旋转杆的顶端固定连接有旋转齿轮,旋转齿轮与齿圈相啮合,旋转齿轮可以带动齿圈转动。
与现有技术相比,本发明的有益效果是:
1、本方案通过螺纹杆与矩形柱内的螺纹孔槽相配合,可以有效的调节矩形柱的高度,便于在使用时升高提升作业高度,在不使用时进行收纳,降低对高度空间的占用;
2、本方案通过第一蜗杆与第一蜗轮相配合,第二蜗杆与第二蜗轮相配合,旋转轴与支撑架相配合,从而可以在码垛装置运行时,通过支撑架有效的提升底座的稳定性;
3、本方案通过第三蜗杆与第四蜗轮相配合,旋转齿轮与齿圈相配合,从而可以有效的使得两个机械码垛臂进行位置的调换,使其进行交替的码垛,提升卸货码垛的效率;
本发明可以在码垛装置运行时,通过支撑架有效的提升底座的稳定性,通过两个机械码垛臂进行交替的码垛,提升卸货码垛的效率。
附图说明
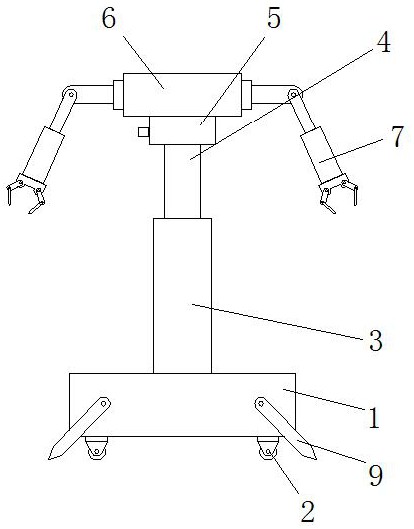
图1为本发明提出的一种物流卸货用自动码垛装置的结构示意图;
图2为本发明提出的一种物流卸货用自动码垛装置的底座结构示意图;
图3为本发明提出的一种物流卸货用自动码垛装置的立柱结构示意图;
图4为本发明提出的一种物流卸货用自动码垛装置的旋转座结构示意图;
图5为本发明提出的一种物流卸货用自动码垛装置的矩形柱立体结构示意图。
图中:1、底座;2、万向轮;3、立柱;4、矩形柱;5、旋转座;6、安装座;7、机械码垛臂;8、旋转轴;9、支撑架;10、螺纹杆;11、第一电机;12、第一蜗杆;13、第一旋转杆;14、第一蜗轮;15、第二蜗杆;16、第二蜗轮;17、滑环;18、第二电机;19、第二旋转杆;20、第三蜗杆;21、第三旋转杆;22、第三蜗轮;23、齿圈;24、旋转齿轮;25、安装腔;26、旋转槽。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
实施例一
参照图1-5,一种物流卸货用自动码垛装置,包括底座1,底座1的底部设置有多个万向轮2,底座1的顶部通过焊接固定设置有立柱3,立柱3的顶部开设有矩形滑槽,矩形滑槽内滑动安装有矩形柱4,矩形柱4的顶部通过焊接固定连接有旋转座5,旋转座5的顶部转动设置有安装座6,安装座6的外侧对称设置有两个机械码垛臂7,底座1上设置有两组底座限位稳定机构。
本实施例中,底座限位稳定机构包括开设于底座1内的安装腔25,安装腔25内转动安装有旋转轴8,旋转轴8的两端均延伸至底座1的外侧并通过焊接固定连接有支撑架9,旋转轴8可以带动支撑架9翻转。
本实施例中,矩形滑槽与安装腔25相互靠近的一侧开设有同一个旋转孔,旋转孔内转动安装有螺纹杆10,矩形柱4的底部开设有螺纹孔槽,螺纹杆10的顶端螺纹安装于螺纹孔槽内,安装腔25的底部内壁上通过螺栓固定安装有第一电机11,螺纹杆10的底端与第一电机11的输出轴相焊接,螺纹杆10可以通过螺纹孔槽带动矩形柱4位移。
本实施例中,螺纹杆10的外侧通过焊接固定套设有第一蜗杆12,安装腔25内转动安装有第一旋转杆13,第一旋转杆13的外侧通过焊接固定套设有第一蜗轮14,第一蜗轮14与第一蜗杆12相啮合,第一蜗杆12可以带动第一蜗轮14转动并降低速率。
本实施例中,第一旋转杆13的外侧通过焊接固定套设有两个第二蜗杆15,旋转轴8的外侧通过焊接固定套设有第二蜗轮16,第二蜗轮16与第二蜗杆15相啮合,第二蜗杆15可以带动第二蜗轮16转动并降低速率。
本实施例中,旋转座5的顶部开设有旋转槽26,安装座6转动安装于旋转槽26内,旋转槽26的内壁上开设有环形滑槽,环形滑槽内滑动安装有滑环17,滑环17通过焊接固定套设于安装座6的外侧。
本实施例中,旋转座5的外侧通过螺栓固定安装有第二电机18,旋转槽26内转动安装有第二旋转杆19,第二旋转杆19的一端延伸至旋转座5的外侧并与第二电机18的输出轴相焊接,第二旋转杆19的外侧通过焊接固定套设有第三蜗杆20,旋转槽26内转动安装有第三旋转杆21,第三旋转杆21的外侧通过焊接固定套设有第三蜗轮22,第三蜗轮22与第三蜗杆20相啮合,第三蜗杆20可以带动第三蜗轮22转动并降低速率。
本实施例中,安装座6的底部开设有凹槽,凹槽内设置有齿圈23,第三旋转杆21的顶端通过焊接固定连接有旋转齿轮24,旋转齿轮24与齿圈23相啮合,旋转齿轮24可以带动齿圈23转动。
本实施例中,在使用时,可以通过万向轮2进行移动,提升使用的灵活性,到达指定地点后启动第一电机11,第一电机11的输出轴带动螺纹杆10转动,螺纹杆10通过螺纹孔槽带动矩形柱4提升,从而使得在使用时提升机械码垛臂7的作业高度,在不使用时进行收纳,降低对高度空间的占用,同时螺纹杆10带动第一蜗杆12转动,第一蜗杆12带动第一蜗轮14转动并降低速率,第一蜗轮14带动第一旋转杆13转动,第一旋转杆13带动第二蜗杆15转动并降低速率,第二蜗杆15带动第二蜗轮16转动,第二蜗轮16带动旋转轴8转动,旋转轴8带动支撑架9翻转,使得支撑架9与地面相抵,有效的为底座1提供有效的支撑力,提升底座1的稳定性,另外,使用时启动第二电机18,第二电机18的输出轴带动第二旋转杆19转动,第二旋转杆19带动第三蜗杆20转动,第三蜗杆20带动第三蜗轮22转动并降低速率,第三蜗轮22通过第三旋转杆21带动旋转齿轮24转动,旋转齿轮24通过齿圈23带动安装座6转动,从而可以有效的使得两个机械码垛臂7进行位置的调换,使其进行交替的码垛,提升卸货码垛的效率。
实施例二
与实施例一的不同之处在于:机械码垛臂7上设置有光纤漫反射式感应器,可以有效的对货物的摆放方向进行扫描检测,便于进行有效的抓取和摆放。
- 一种物流用卸货装置
- 一种机械自动化卸货装置
- 一种可分类的自动码垛装置
- 一种物流卸货用自动码垛装置及其卸货方法
- 一种物流仓库自动卸货码垛机及码垛方法