电动马达芯的激光辅助加工
文献发布时间:2023-06-19 09:30:39
相关申请的交叉引用
本申请要求2018年4月13日提交的美国临时申请No.62/657,371的权益,在此其全部公开内容通过引用合并于此。
技术领域
本申请总体上涉及用于由扁材制造部件的方法和系统,并且更具体地涉及在电动马达定子芯的制造中对片料的激光加工。
背景技术
扁平零件通常由具有不同化学成分的钢的钢片、钢卷、钢辊或钢圈制成。特别地,电动马达定子叠片通常使用冲击和层叠工艺由硅钢制造。诸如冲头和冲模之类的硬质工具通常用于制造中,例如用于冲压操作中。硅钢坚硬且粗糙,并且会快速磨损冲压工具。因此,必须定期对工具进行重新锐化和重新磨削,这会对生产周期和时间表产生不利影响。而且,冲头和冲模的切割动作导致叠片的切割边缘周围的塑性变形,特别是当工具失去其边缘而磨损时。这种变形会损坏钢材结构,从而不利地影响叠片的磁特性,并最终影响所得的马达定子芯的性能。
解决马达叠片和芯的生产中的这些问题的系统和方法将受到欢迎。
发明内容
本公开的各种实施例描述了通过将切割工序、刻划工序和分离工序与平坦化工序相结合而由片材或卷材制造部件或零件的工艺。这些零件包括基本平坦的部件,例如电动马达定子叠片。切割工序包括使用高功率能源(例如激光束)切割部件周边的部分轮廓。切割工序可以包括切割部件的周边的20%至97%。刻划工序包括对部件周边的至少部分轮廓进行刻划。使用高功率能源(例如激光束)对部件周边进行刻划。刻划工序可以包括对部件的周边的20%至100%进行刻划。分离工序包括例如通过冲击操作将部件与片或卷分离,并且利用压缩空气或利用电磁脉冲将部件从冲击工具中去除。
另外,公开了一种系统和方法,其中对包括刻划线或切割边缘或两者的片材的切割或刻划部分进行平坦化操作。平坦化工序可以在分离工序之前执行。在冲压工序之前执行平坦化工序具有提高工艺效率的效果,因为片材或卷材容易被处理以及从切割和刻划工序输送通过平坦化工序并到达分离工序,而无需单独处理叠片。还公开了将叠片的层叠与分离工序集成在一起以形成马达定子芯的另一高效率方面。当处理薄的片料或卷料时,这种高效化特别有价值,该片材或卷材普遍存在于马达芯的制造中,该薄片或卷材在某些情况下类似于箔材料。在本文中,“片材”被广义地解释为包括常规的片、带、薄板、卷轴、卷和可以在冲压或冲孔操作中处理的其他此类形式。
平坦化工序的作用是通过使在切割或刻划工序中可能出现的突出特征(例如可能在刻划凹槽的拐角处形成的熔融材料的浮渣或珠子)平坦化而使片材的切割和/或刻划部分恢复到大致原始厚度。由于在切割工序和刻划工序期间产生的温度梯度,片的切割和/或刻划部分可能会发生一定程度的弯曲或翘曲。平坦化工序可以去除或减少这种弯曲或翘曲并使片材的刻划部分恢复到平面状态。
所公开的系统和方法的另一方面是刻划线在分离工序期间确定了叠片和片材之间的分离线的位置。如果使用刚性冲头和冲模进行分离工序,则不需要冲头和冲模之间的严格公差来实现所需的叠片形状。这放宽了对工具的公差要求,从而模间隙可以是片材厚度的一倍或两倍或更大,而不是片材厚度的5%至15%。因此,降低了工具的成本,并且在需要更换或翻新之前,工具可经历更大程度的磨损。此外,由于相对于剪切片材的整个厚度减小了在刻划线处剪切叠片所需的力,因此可以大大降低工具的磨损率。
令人惊讶地是,我们发现,对于许多应用,在分离工序之前将片材的切割和/或刻划部分压缩地平坦化的顺序产生精加工的或接近精加工的叠片。对于某些应用,边缘的粗糙度在精加工的规格范围内。通常,在平坦化工序期间,在切割和/或刻划凹槽的拐角处向下翻转的浮渣或重熔融材料是被预加应力和疲劳的,并且通过光精加工技术很容易去除。叠片即使由较大的冲头和模间隙制得,也可以在整个冲击工序中保持令人满意的平面度。
在结构上,本公开的各个实施例包括一种用于由片材制造马达定子叠片的刻划辅助方法,该刻划辅助方法包括:利用高能辐射源在片材上刻划部件的至少一个轮廓;在刻划步骤之后,用平坦化装置使轮廓平坦化;在使轮廓平坦化的步骤之后,例如通过使轮廓与部件冲模对准,部件冲模被定位和配置为接纳部件冲头,以及在对准步骤之后,驱动部件冲头穿过片材并进入部件冲模中以将部件设置在层叠固定装置上,从而将部件与片材分离。在一些实施例中,重复这些步骤以将多个部件设置在层叠固定装置上,多个部件形成叠层。该方法的其他步骤可以包括从层叠固定装置去除部件冲模,或者从层叠固定装置去除该叠层。在一些实施例中,该方法包括:将叠层的部件结合在一起,加工叠层的内表面和/或加工叠层的外表面。加工步骤可以包括将叠层安装在心轴上,并且还可以包括车削、铣削、磨削、珩磨和电腐蚀中的至少一种。在各个实施例中,部件是电动马达叠片,并且叠层是电动马达芯。刻划步骤中的高能辐射源可以是激光器。在一些实施例中,在刻划步骤之后和驱动步骤之前,该方法包括从片材的该部分去除表面碎屑。可以用压缩空气执行去除松散材料的步骤。
在一些实施例中,在平坦化步骤之前,该方法包括利用高能辐射源从片材中切出废料以将废料与片材分离。在其他实施例中,在驱动部件冲头的步骤之前,该方法包括驱动废料冲头穿过片材并进入废料冲模,该废料冲头位于轮廓的废料周边内。在驱动部件冲头的步骤期间,由部件限定的空隙可以轴向地穿过层叠固定装置的柱。对于部件是电动马达叠片的实施例,空隙可以是在电动马达叠片的相邻定子齿之间限定的狭槽。
在本公开的一些实施例中,该刻划辅助方法包括对待插入部件冲模内的部件冲头进行配置以限定最小模间隙,该最小模间隙是片材的厚度的至少一倍且不大于三倍。刻划步骤还可以限定凹槽,该凹槽的深度在不小于片材的厚度的20%且不大于片材的厚度的95%的范围内。切割操作可以包括切割零件周边的20%至95%。在一些实施例中,平坦化装置是辊子组件。在一些实施例中,辊子组件包括两个辊子,将两个辊子的间隔保持为不小于片材标称厚度且不比片材标称厚度大1微米以上。在一些实施例中,在平坦化步骤期间施加辊压,并且辊压的范围可以小于片材的屈服强度。在一些实施例中,该方法包括提供厚度在20μm至400μm(包括端值)范围内的片材,并且片材可以是由金属材料(例如包括铁、硅和硼的硅钢)或者非晶态金属或纳米晶金属制成的。
在本公开的各个实施例中,一种用于由片材制造马达叠片的系统包括:输送机,该输送机用于沿输送路径输送片材;高能辐射源,该高能辐射源用于在片材上形成限定部件的外周边的形状的外刻划线;以及平坦化装置,该平坦化装置用于使片材的刻划部分平坦化。一些实施例包括用于在外刻划线处将部件与片材分离的部件冲头以及被配置为接纳部件冲头的部件冲模。层叠固定装置可以被配置为接纳部件冲头,该层叠固定装置支撑部件冲模。平坦化装置沿输送路径设置在高能辐射源和分离工序之间。高能辐射源可以是激光器。平坦化装置可以是包括两个辊子的辊子组件,该两个辊子由辊子支架分开,该辊子支架将所述两个辊子之间的间隔限制为最大值。在一些实施例中,辊子之间的间隔不小于片材的标称厚度并且不比片材的标称厚度大一微米以上。在一些实施例中,辊子组件是压辊,其中,压辊被配置为在片材上施加小于片材的屈服强度的辊压。
在一些实施例中,层叠固定装置包括基座和从基座向上延伸的柱。部件冲模可以由基座支撑,并且柱可以延伸到冲模中并且平行于部件冲头的致动轴线。在一些实施例中,柱被配置为装配在由部件限定的空隙内。层叠固定装置可以被配置为接纳多个部件以形成叠层。在一些实施例中,部件是电动马达定子叠片,并且叠层是电动马达定子芯。
高能辐射源可以被配置为用于从外刻划线内切出废料以将废料与片材分离。替代地,高能辐射源被配置为用于形成由外刻划线围绕的废料刻划线,该废料刻划线限定废料的外周边的形状。在一些实施例中,刻划辅助系统包括:废料冲头,该废料冲头用于在废料刻划线处将废料与片材分离;以及废料冲模,该废料冲模被配置为接纳废料冲头。废料冲头可以沿输送路径设置在平坦化装置和部件冲头之间。在各个实施例中,刻划辅助系统被配置为处理厚度在20μm至400μm(包括端值)范围内的片材。高能辐射源可以被配置为形成凹槽深度,该凹槽深度在不小于片材的厚度的20%且不大于片材的厚度的95%的范围内。
附图说明
图1是根据本公开的实施例的刻划辅助系统的局部立体图;
图2是根据本公开的实施例的包括废料冲头和冲模的刻划辅助系统的局部立体图;
图3是根据本公开的实施例的在平坦化之前和平坦化之后的刻划线凹槽的端部截面图;
图4是根据本公开的实施例的桥接切穿部分的刻划接片的剖视图;
图5是根据本公开的实施例的穿孔刻划线的平面图;
图6是根据本公开的实施例的图5的穿孔刻划线的侧视截面图;
图7是根据本公开的实施例的替代性穿孔刻划线的侧视截面图;
图8是根据本公开的实施例的另一替代性穿孔刻划线的侧视截面图;
图9是根据本公开的实施例的与片材的刻划部分对准的废料冲头和废料冲模的立体图;
图10是图9的根据本公开的实施例的废料冲头的正视局部剖视图,该废料冲头在片材和废料冲模上方居中;
图11是图10的剖视图的局部放大图,其描绘了根据本公开的实施例的废料冲头和废料冲模的模间隙;
图12是图10的根据本公开的实施例的废料冲头的正视图,该废料冲头穿过片材并插入废料冲模中;
图13是在图12的平面XIII-XIII处的根据本公开的实施例的插入废料冲模中的废料冲头的截面图;
图14是根据本公开的实施例的在去除了废料的片材的刻划部分上方居中的部件冲头以及在片材下方居中的部件冲模和层叠固定装置的立体图;
图15是图14的根据本公开的实施例的部件冲头的正视局部剖视图,该部件冲头在片材上方居中并且与部件冲模对准;
图16是图15的剖视图的局部放大图,其描绘了根据本公开的实施例的部件冲头和部件冲模的模间隙;
图17是图15的根据本公开的实施例的部件冲头的正视图,该部件冲头穿过片材并插入部件冲模中;
图18是在图17的平面XVIII-XVIII处的根据本公开的实施例的插入废料冲模中的废料冲头的截面图;
图19是图14的根据本公开的实施例的部件冲模的立体局部剖视图,该部件冲模定位在层叠固定装置上,并且部件在层叠固定装置上对准;
图20是图14的根据本公开的实施例的部件冲头的正视图,该部件冲头穿过片材并插入部件冲模中以将部件输送到部件的叠层上并压缩部件的叠层;
图21是图14的根据本公开的实施例的部件冲模和层叠固定装置的立体图,部件冲模和层叠固定装置分离以释放部件的叠层;
图22是根据本公开的实施例的电动马达芯的部分层的叠片的立体图;
图23是根据本公开的实施例的制造为图22的叠片的叠层的电动马达芯的一段的立体图;
图24是根据本公开的实施例的包括图23的多个段的电动马达芯;
图25是根据本公开的实施例的1千瓦镱单模连续波切割激光的单次扫描的凹槽的切割深度相对于扫描速率的曲线图;以及
图26是根据本公开的实施例的扫描速率为每秒20米的1千瓦镱单模连续波切割激光的凹槽的切割深度相对于扫描次数的曲线图。
具体实施方式
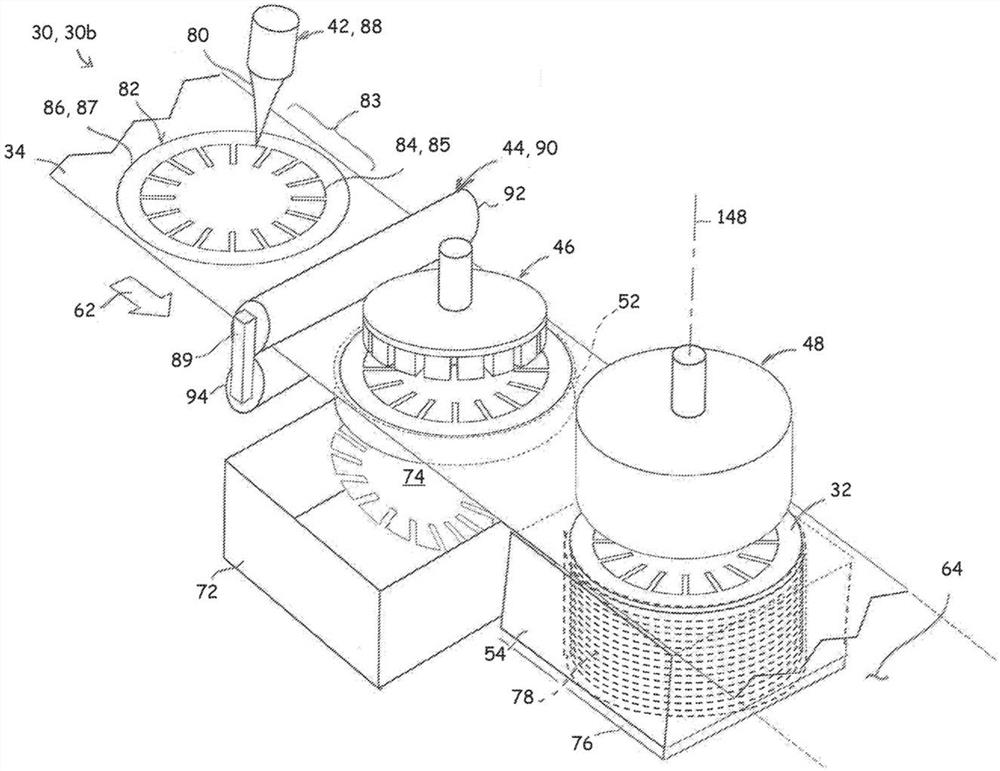
参考图1,根据本公开的实施例,描绘了用于由片材34制造部件32的刻划辅助系统30a。在所描绘的实施例中,刻划辅助系统30a包括扫描辐射源42、片平坦化装置44、部件冲头48和部件冲模54。指向片材34的空气喷嘴56也在所描绘的实施例中。废料箱72可以被配置为接纳通过扫描辐射源42从片材34去除的废料74。废料74可以是(所描绘的)单个连续件或者可以是多个件(例如,多个隔离的孔)。在一些实施例中,层叠固定装置76被配置为接纳由部件冲头48经过若干个冲击循环从片材34上去除的部件32的叠层78。除了从片材34上去除部件32之外,部件冲头48还可以用于压缩和稳定叠层78。
参考图2,根据本公开的实施例,描绘了用于由片材34制造部件32的刻划辅助系统30b。刻划辅助系统30b包括许多与刻划辅助系统30a相同的部件和属性,其由相同标号的参考字符表示。另外,刻划辅助系统30b包括废料冲头46和废料冲模52。在图2中未描绘空气喷嘴56,但是可以想到,空气喷嘴56也可以用于刻划辅助系统30b中。对于刻划辅助系统30b,通过致动废料冲头46产生废料74,因此将废料箱72定位并配置为从废料冲模52接纳废料74。
刻划辅助系统30a和30b在本文中被总地或统称为刻划辅助系统30。刻划辅助系统30被配置为沿输送路径64在方向62上输送片材34,使得片材34的给定部分依次在扫描辐射源42之下、穿过片平坦化装置44、并在部件冲头48和部件冲模54之间输送。
扫描辐射源42发射集中的辐射束80,并且可以被配置为快速勾画片材34上的部件32的轮廓82。快速移动辐射源的示例在例如Kancharla的美国专利No.9,649,727中被找到,并且该专利由本申请的所有者拥有,除明确限定及其中包含的权利要求外,该专利的全部公开内容通过引用整体并入本文。扫描辐射源42可以是激光器88。激光器88可以是连续波(CW)或脉冲的。合适的激光器的非限制性示例包括镱单模CW激光器,例如由IPG Photonics制造的YLR-1000-WC-Y14。可以使用具有足够功率、脉冲或连续波的其他单模激光器。也可预期将β辐射源(即电子束)用作扫描辐射源42。在一些实施例中,辐射源42被配置为发射0.5kW(千瓦)至2kW(包括端值)范围内的功率。这里,所谓“包括端值”的范围包括该范围的端点值以及该范围内的所有中间值。
片材34的刻划有轮廓82的部分在本文中被称为片材34的刻划部分83。在所描绘的实施例中,轮廓82包括内或废料刻划线84和外刻划线86。内刻线84勾画废料74的外周边85。外刻划线86勾画部件32的外周边87。内刻线84和外刻线86结合以限定部件32的边界。扫描辐射源42可以被配置为在多次扫描中将轮廓82勾画至片材34的厚度t内的期望深度(例如图11)。刻划线84和86的期望深度的非限制性示例在片材34的厚度t的20%至80%(包括端值)的范围内。在一些实施例中,厚度t在50μm至400μm(包括端值)的范围内。
空气喷嘴56可以位于片平坦化装置44和部件冲头48之间(所描绘的)。替代地,空气射流可以位于扫描辐射源42和片平坦化装置44之间。在一些实施例中,包含附加的空气射流,使得空气射流位于片平坦化装置44的两侧。喷嘴56可以被配置为以横向扫过片材34(所描绘的)的方式发射射流。在一些实施例中,空气喷嘴56被配置为在紧邻片材34的位置处勾画刻划线84和86。在一些实施例中,刻划线84、86可以通过除空气喷嘴56以外的装置和技术(例如刷子、气刀或水洗)清除表面碎屑。表面碎屑的清除可以在平坦化工序之前或平坦化工序之后,或者在平坦化工序之前和之后都进行表面碎屑的清除。
参考图3,根据本公开的实施例,描绘了利用扫描辐射源42执行多次扫描以形成刻划线84和86的效果。刻划线84和86限定凹槽96,该凹槽96具有在片材34的厚度t内的深度d,并且网部分98桥接该凹槽96的侧面。利用集中的辐射束80对片材34进行刻划导致一些重熔融和浮渣材料102聚集在凹槽96的拐角104处并延伸突出于片材34的表面106。在所描绘的实施例中,通过蒸发从凹槽96去除一些片材34,使得重形成的材料102的体积和质量仅为从凹槽96去除的片材34总量的一小部分。
在一些实施例中,扫描辐射源42被配置为以在从5m/s(米/秒)到30m/s(包括端值)的范围内的速率扫描轮廓82。在一些实施例中,扫描辐射源42发射0.1kW至2kW(包括端值)范围内的辐射。图2所描绘的凹槽96的横截面是用1kW激光器以20m/s的扫描速率总共扫描了4次的标称厚度为97μm的软钢片材34的横截面照片的非限制性渲染。在硅钢片上相同的刻划参数的结果是相似的。对于软钢和硅钢,在规定的刻划条件下,已观察到,对于扫描辐射源42的每次扫描从凹槽96去除的材料的厚度在15μm至35μm(包括端值)范围内,去除的材料的标称厚度为16μm至20μm(包括端值)。软钢和硅钢在不同扫描速率和扫描次数下的切割深度的数据示于下面的图25和图26中。
在功能上,通过由多次扫描形成刻划线84和86,相对于停留足够长以形成凹槽96的单次扫描而言,片材34的热影响区域减小了。此外,因为由集中的辐射束80发射的能量较少被片材34吸收,所以相对于深度类似的凹槽的单次扫描形成,在连续扫描期间蒸发的材料量可以增加。同样,在初始扫描期间,可以在凹槽96的侧面上(例如通过重整浮渣)形成的不整齐可以在连续扫描中被烧蚀,以形成更干净、更清晰的凹槽96。
在一些实施例中,一条轮廓线可以被完全切穿,而另一条轮廓线可以被刻划。在刻划辅助系统30a中描绘了这种布置,其中,废料74被扫描辐射源42完全切穿,同时保留了外刻划线86。这种布置消除了对废料冲击工序的需要,同时留下了附接到片材34的部件32,以将部件32沿输送路径62穿过片平坦化装置44输送到部件冲模54上。
参考图4,根据本公开的实施例,描绘了刻划的接片构造100。在该实施例中,将刻划与切穿相结合,使得部件32的轮廓线的一部分以片材34的厚度t被切穿,同时片材保留沿轮廓线的另一部分。例如,周边85、87中的一个或两个可以包括切穿部分91和接片部分93,接片部分93桥接切穿部分91。在一些实施例中,接片部分93以图3所描绘的方式刻划有凹槽96。在一些实施例中,多个这样的接片部分93沿周边85、87形成。在一些实施例中,接片93的切向长度95的总和与对应的周边85、87的总长度之比在50%至97%(包括端值)的范围内;在一些实施例中,该比率在75%至95%的范围内;在一些实施例中,该比率在85%至95%的范围内。
在功能上,接片93保持部件32与片材34之间的联接或废料74与片材34之间的联接,使部件32或部件32和废料74的组合与片材34一起沿输送路径64稳定地被输送,以用于依次定位在部件冲模54上或废料冲模52和部件冲模54两者上。相对于常规的冲压工序,废料74与部件32之间以及部件32与片材34之间的桥接减少,从而减小了所需的分离力。在其中对接片部分93进行刻划的实施例中,力进一步减小,并且与未对接片部分93进行刻划相比,分离线可以在更严格的公差内被预测。
在所描绘的实施例中,片平坦化装置44是辊子组件90,辊子组件90包括在片材34的相对两侧上的相对的辊子92、94。相对的辊子92、94可以联接到辊子支架89,辊子支架89被配置为将辊子92和辊子94的间隔限制为最大预定距离。在一些实施例中,辊子92和辊子94的最大间隔设置为至少为片材的标称厚度t,并且不比标称厚度(t)大1μm以上。在一些实施例中,辊子支架89被配置为提供辊子92和辊子94的刚性分离。辊子92、94中的每个辊子与片材34的接触可以通过电接触测量来建立。在一些实施例中,辊子92、94是硬金属材质的。在一些实施例中,辊子92和辊子94以不同的电势工作,从而在穿过辊子组件90输送期间使电流流过片材34。
在功能上,将辊子92和辊子94之间的间隔限制成为标称厚度t的最大尺寸或将间隔严格地保持为片材34的标称厚度t,这使辊子组件90能够执行平坦化功能而不会在片材的芯上施加很大的应力。当片材的刻划部分83穿过辊子组件90时,只有相对于表面106的突出特征(例如在拐角104处的重熔融和浮渣材料102(图3))超过了片材34的标称厚度t并与辊子92、94压接触。由于辊子92和辊子94之间的间隔不超过标称厚度t或恒定地保持在标称厚度t,因此重熔融和浮渣材料102将局部屈服于辊子92、94,从而导致使这些特征降低的塑性变形。
因此,片材的刻划部分83被平坦化而不会产生大量的赫兹接触应力。赫兹接触理论表征了弯曲应力的接触所产生的应力,并且在例如Xiaoyin Zhu的“赫兹接触应力教程(Tutorial on Hertz Contact Stress)”(网址为https://wp.optics.arizona.edu/optomech/wp-content/uploads/sites/53/2016/10/OPTI-521-Tutorial-on-Hertz-contact-stress-Xiaoyin-Zhu.pdf,上次访问于2018年3月27日)中进行了描述,除了其中所包含的明确定义之外,其公开内容通过引用整体并入本文。已知过大的赫兹接触应力会例如不利地影响材料的磁性。
替代地,辊子组件90可以是压辊,该压辊被配置为当片材34被输送穿过辊子组件90时使用预定力在辊子组件90之间压缩片材34。辊子92、94之间的压缩可以例如利用液压致动器(未示出)来实现。可以调整由辊子组件90产生的预定力,以在片材34上发射不超过材料的屈服强度的应力。因为重熔融和浮渣材料102相对于片材34的表面106突出并且构成辊子组件90的总线接触的一小部分,所以重熔融和浮渣材料102上的局部应力将远远超过片材34上的平均应力,从而防止片材34的芯变形,同时仍提供重熔融和浮渣材料102的平坦化(塑性变形)。在一些实施例中,辊子组件90被配置为仅当片材34移动穿过辊子组件90时,才对片材34施加压缩力。替代地,平坦化装置44可以包括平压板(未描绘)、摇摆按压装置(未描绘)或技术人员可用的使片材平坦化的其他装置和技术。
根据本公开的实施例,图3还描绘了在刻划之后但在冲压之前使片材34平坦化的效果。片材34前进穿过辊子组件90,从而使重形成的材料102平坦化(即,使其与表面106大致持平)。对于某些材料,例如软钢和非晶硅钢,重形成的材料102相对易延展,从而使重形成的材料在拐角104处下降。而且,在平坦化工序期间,一些脆弱地附接到拐角104的重形成的材料可能会受到预应力并且疲劳或者断裂和脱落。以不同的电势操作辊子92、94可以对片材34提供局部加热以增强平坦化工序。电流还与部件32的芯相互作用,以增强平坦化工序期间期望的塑性变形。
因此,使片材34“平坦化”是将重熔融和浮渣材料102压缩或返回至大致在片材34的原始厚度t处或片材34的原始厚度t之内,并且减轻片材的弯曲和翘曲。也就是说,片材34在平坦化工序之后仍将限定轮廓82。平坦化工序不会将片材34压缩到消除刻划线82和84的程度。
在一些实施例中,仅在片材34前进穿过辊子组件90时,才由辊子组件90施加压缩力。通过仅在片材34穿过辊子组件90时才用辊子组件90施加压缩力,该系统避免了片材34出现凹痕,否则该凹痕可能会在片材暂时停留在辊子92、94内时发生。
参考图5至图8,在本公开的实施例中描绘了穿孔刻划线108。穿孔刻划线108的特征在于具有沿凹槽96内的网部分98的长度方向形成的穿孔110。在一些实施例中,刻划轮廓82的废料刻划线84和外刻划线86中的至少一者或两者的至少一部分形成有这种穿孔刻划线108。穿孔刻划线108可以由如上所述的多次扫描形成。在图5和图6中,刻划轮廓82最初形成为连续的并且具有大致均匀的深度,随后沿凹槽96的长度在离散点处爆发辐射能量以形成穿孔110。在一些实施例中,仅穿孔是由扫描辐射源42形成的(图7)。也就是说,刻划辅助系统30被配置为使得扫描辐射源42仅在穿孔110的期望位置处释放辐射爆发,以形成不连续的刻划轮廓82。在一些实施例中,扫描速率是波状的,使得集中的辐射束80在待形成穿孔110的区域(图8)上停留或更缓慢地穿过。在形成穿孔刻划线108之后,如上所述,因此形成的具有刻划线82和84的片材34可以被压缩平坦化。
在功能上,穿孔110用于减小将部件32或废料74或两者与片材34分离所需的力。可以沿穿孔110的边界形成的任何浮渣材料可以由平坦化装置44以与上述拐角104相同的方式被平坦化或去除。穿孔110还可以用于限制沿分离线的撕开或撕裂的影响,并且保持分离线沿网部分98居中,从而部件32的标称周边是大致均匀的。
参考图9,示出了根据本公开的实施例的废料冲头46和废料冲模52。废料冲头46和废料冲模52之所以被如此命名为是因为它们的功能是从片材34中去除不属于成品部件32的一部分的废料74。废料冲头46可以限定足迹112,足迹112接近废料74的内或废料刻划线84但位于废料74的内或废料刻划线84内。废料冲模52在被利用时被配置为接纳废料冲头46,并且可以限定足迹114,足迹114接近轮廓82的废料刻划线84但位于轮廓82的废料刻划线84内。
在操作中,在部件32已经被扫描辐射源42刻划之后,部件32的轮廓82的内刻划线或废料刻划线84在废料冲模52上对准以在废料冲头46和废料冲模52之间限定模间隙122(图10和图11)。刻划辅助系统30b可以被配置为使得轮廓82与废料冲头46和废料冲模52处于相同的旋转定向,从而通过将轮廓82调整到废料冲模52上,将废料刻划线84定位在模间隙122的上方。当部件轮廓82与废料冲模52对准时,废料刻划线84勾画在模间隙122上。
然后,在废料刻划线84内对准的废料冲头46被推过片材34,以在废料刻划线84处将废料74与片材34分离(图12)。在废料74的分离期间,废料冲头46至少部分地插入废料冲模52中。在图13中示出了废料冲模52内的废料冲头46的剖视图,其描绘了废料冲头的横截面124和废料冲模的横截面126。在一些实施例中,当将废料冲头46插入废料冲模52中时,在废料冲头46和废料冲模52之间横向地限定了模间隙122。在一些实施例中,模间隙122的最小尺寸128为所述片材34的厚度t的至少一倍且不大于三倍。
参考图14至图18,根据本公开的实施例描绘了部件冲头48和部件冲模54。部件冲头48和部件冲模54之所以被如此命名,是因为它们用于从片材34上去除部件32。这样,部件冲头48可占用足迹142,该足迹接近外刻划线86但位于外刻划线86内。部件冲模54在被利用时被配置为接纳部件冲头48并且可以限定在外刻划线86外部的足迹144。在所描绘的实施例中,外刻划线86以及因此的部件冲模54的容器146都是圆形的。
在操作中,在用扫描辐射源42对部件32的轮廓82进行刻划并且废料74从片材34上去除之后,将外刻划线86在部件冲模54上对准,部件32被外刻划线86或刻划接片径向地悬挂。当对准时,部件冲头48和部件冲模54限定模间隙166,外刻划线86定位在模间隙166上(图15和图16)。然后将部件冲头48沿致动轴线148推过片材34,以在外刻划线86处将部件32与片材34分开(图17)。在部件32的分离期间,部件冲头48至少部分地插入部件冲模54中。在所描绘的实施例中,部件冲头48驱动部件32与层叠固定装置76的基座182接触。在图18中示出了部件冲模54内的部件冲头48的横截面图,其描绘了部件冲头的横截面162和部件冲模的横截面164。在所描绘的实施例中,部件冲头48限定了平行于致动轴线148延伸的通道178,如在足迹142和部件冲头48的横截面162中所见。通道178容纳层叠固定装置76的对准柱184,这将在下面结合图19至图21更详细地讨论。模间隙166可以是连续的并且限定在部件冲头48和部件冲模54之间。在一些实施例中,模间隙168的最小尺寸为片材34的厚度t的至少一倍且不大于三倍。
参考图19至图21,根据本公开的实施例描绘了层叠固定装置76。在所描绘的实施例中,层叠固定装置76包括基座182以及平行于致动轴线148从基座182向上延伸的一个或多个对准柱184。部件冲模54由层叠固定装置76的基座182支撑,从而对准柱184从基座182向上延伸并进入部件模具54中。对准柱184的位置和形状使得当部件32被推入部件冲模54中时,由部件32限定的一个或多个空隙或凹口185轴向穿过柱184。
在一些实施例中,部件冲头48被配置为将连续制造的部件32安置在层叠固定装置76上并且位于部件冲模54内,以形成部件32的叠层190(图20)。每个连续的部件32被压缩到叠层190上。当叠层190被构建至期望的配置时,可以通过从基座182上去除部件冲模54并从叠层190中抽出层叠固定装置76来释放叠层190(图21)。
在功能上,刻划轮廓82控制废料74和部件32二者的冲击工序中的分离线。这与常规的冲压工序相反,在常规的冲压工序中,分离线由工具和冲模之间的严格公差控制。因此,废料冲头46和废料冲模52之间以及部件冲头48和部件冲模54之间的公差可以更大。更大的公差使部件32在叠层190的形成期间能够被深深地驱动到废料冲模54中。而且,由于在刻划之后但在冲击操作之前发生压缩滚压工序,部件32在与片材34分离时处于精加工状态,并且准备好被层叠。在部件32的制造和叠层190的形成中对部件冲模54的使用将叠层190的制造与部件32的制造集成在一起,从而消除了在额外的制造工序中形成叠层190的需要。对准柱184用于在每个连续的部件32被压缩到叠层190上时维持每个连续的部件32的旋转定向,并在堆放期间保持叠层190的正确的圆柱形几何构型。
在所描绘的实施例中,部件32是电动马达叠片192。存在三个对准柱184,每个对准柱184被配置为装配在相邻定子齿188之间限定的相应狭槽186内。叠层190形成电动马达的定子芯194。连续的叠片192的压缩形成整体上具有基本均匀特性的定子芯194。
在一些实施例中,刻划辅助系统30被配置为依次产生各种形状。例如,给定的定子芯194可以要求相邻的马达叠片192具有略微不同的形状以建立期望的三维几何构型。每个连续的刻划轮廓82可以由刻划辅助系统30以适当的顺序生成,使得连续的马达叠片192在依次层叠时提供三维几何构型。
已经产生了定子芯194后,马达叠片192可以结合在一起以将它们固定在适当的位置并将定子芯194保持在一起。粘合可能需要对定子进行热处理或烘烤。定子芯194的内表面196也可以进行层叠后精加工以提高公差和表面质量。在一些实施例中,定子芯194的外表面198进行精加工。定子芯194可以安装在可扩展的心轴(未示出)上,以在外部精加工工序期间进行处理。用于精加工定子芯194的表面196、198的示例性技术包括车削、铣削、磨削、珩磨、电腐蚀或技术人员可用的其他精加工工艺。
参考图22至图24,根据本公开的实施例描绘了定子芯200的替代构造。在所描绘的实施例中,根据前述技术,制造并层叠构成定子芯200的层的一部分的叠片202,以产生定子芯段204。可以通过根据本文公开的原理修改工具以制造叠片202。这种修改在相关领域的普通技术人员的能力范围内。多个定子芯段204可以被表面精加工并且接合在一起以由切向邻接并轴向层叠的多个定子芯段204形成定子芯200。接合可以例如通过焊接或胶合工序来执行。在所描绘的实施例中,将叠片202的尺寸确定为层叠和精加工之后的叠片层的1/4。应该理解的是,任何分数都可以用于叠片202,这些分数包括1/2、1/3、1/4、1/5、1/6或更小。
参考图25,根据本公开的实施例,示出了表征凹槽的切割深度参数212相对于激光器的扫描速率(切割速度)214的数据曲线图210。这些数据是在实验装置中获得的,使用的是IPG Photonics YLR-1000-WC-Y14镱单模CW激光器,功率级为1000瓦,光纤直径为14μm。激光扫描采用带有200mm准直器和254mm聚焦透镜的IPG 2D高功率扫描仪。聚焦光斑直径被计算为18μm。测试在ABB IRB2400机器人工作站的固定扫描仪装置中进行。测试在真空蜂窝切割台上进行,并且气刀吹扫直接作用于工序区域。测试在标称厚度为100μm的软钢片料和硅钢片料上进行。在曲线图210中示出了软钢数据216和硅钢数据218。
由切割激光以7.0、8.0、10.0、15.0和20.0m/s的扫描速率进行单次扫描来获取数据。曲线图210表明,随着扫描速率的增加,切割深度减小,并且该结果对于软钢和硅钢来说大致相似。还观察到,在较高的扫描速率下沿边界形成的浮渣材料较少。
参考图26,根据本公开的实施例,示出了表征凹槽的切割深度参数222相对于激光器的扫描次数224的数据曲线图220。这些数据是在实验装置中获得的,使用的是IPGPhotonics YLR-1000-WC-Y14镱单模CW激光器,功率级为1000瓦,光纤直径为14μm。激光扫描采用带有200mm准直器和254mm聚焦透镜的IPG 2D高功率扫描仪。聚焦光斑直径被计算为18μm。测试在ABB IRB2400机器人工作站的固定扫描仪装置中进行。测试在真空蜂窝切割台上进行,并且气刀吹扫直接作用于工序区域。测试在标称厚度为100μm的软钢片料和硅钢片料上进行。在曲线图220中示出了软钢数据226和硅钢数据228。
由切割激光器以20.0m/s的扫描速率进行1至5次(包括端值)的多次扫描来获取数据。曲线图220表明,增加扫描次数也增加了切割深度,并且该结果对于软钢和硅钢来说大致相似。还观察到,在20m/s的扫描速率下,经过5次扫描就可以将片料完全切穿。
本文公开的每个附加附图和方法可以单独使用,或者与其他特征和方法结合使用,以提供用于制造和使用它们的改进装置和方法。因此,本文所公开的特征和方法的组合对于在最广义上实践本公开可能不是必需的,而是仅公开以特别地描述代表性的和优选的实施例。
在阅读本公开之后,对实施例的各种修改对本领域技术人员而言是显而易见的。例如,相关领域的普通技术人员将认识到,针对不同实施例描述的各种特征可以单独地或以不同组合适当地组合、非组合及与其他特征重新组合。同样,上述各种特征都应被视为示例性实施例,而不是对本公开的范围或精神的限制。
相关领域的普通技术人员将认识到,各个实施例可以包括比上述任何单个实施例中示出的特征更少的特征。本文所描述的实施例并不意味着是各种特征可以组合的方式的详尽呈现。因此,实施例不是特征的互斥组合;相反,如本领域普通技术人员所理解的,权利要求书可以包括选自不同单个实施例的不同单个特征的组合。
通过引用上述文件进行的任何合并都受到限制,从而不包含与本文明确公开的内容相违背的主题。通过引用上述文件进行的任何合并都受到进一步地限制,从而这些文件中包含的任何权利要求均不通过引用并入本文。通过引用上述文件进行的任何合并都受到再进一步地限制,从而除非本文明确包含,否则这些文件中提供的任何限定均不通过引用并入本文。
除非另有说明,否则本文包含的对“实施例”、“公开”、“本公开”、“本公开的实施例”、“公开的实施例”等的参考是指该专利申请的说明书(文本,包括权利要求书和附图),其不是承认的现有技术。
出于解释权利要求书的目的,明显意在不援引35 U.S.C.112(f)的规定,除非在相应的权利要求中陈述了具体的术语“用于......的手段”或“用于......的步骤”。
- 电动马达芯的激光辅助加工
- 激光辅助加工系统及激光辅助加工方法