脚手架立杆套筒自动分选机
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及一种自动分选装置,特别是一种脚手架立杆套筒的自动上料、分选装置。
背景技术
脚手架立杆焊接有的需要一端焊接套筒,立杆圆管上有两个对称的孔。套筒上有四个对称的孔,两个孔是插销孔,另两个孔是观察孔,孔到两个端面的距离不一样,要求套筒和立杆圆管焊接的一端都要一致,且焊在一起后套筒上的观察孔和圆管上的孔在一条直线上。
目前,公知的脚手架立杆套筒自动分选最先进的技术是:需要人工把套筒分选出左右面,再放入到料仓里进行自动定位,但该方法增加了工人的劳动强度,且生产效率低。
发明内容
针对上述技术问题存在的不足,本发明的目的在于提供一种脚手架立杆套筒自动分选机。
一种脚手架立杆套筒自动分选机,包括,主体框架以及安装在主体框架上的控制箱和电磁气阀,其特征在于:在主体框架的前面靠左侧顶部安装有抓取送料装置,主体框架的中间位置安装有分选定位装置,所述的分选定位装置位于抓取送料装置的正下方,在主体框架的右侧设有用来放置工件套筒的料仓,传送装置安装在主体框架的后侧上部位置,提升装置安装在料仓与传送装置之间,斜坡支架一端连接传送装置,另一端连接分选定位装置;通过提升装置、传送装置、分选定位装置和抓取送料装置,对料仓内的工件套筒进行提取、传送、分选定位后送入指定位置。
所述的提升装置包括,减速机、链轮B、链轮C、挂板、链条B、链轮轴B、链条C和提升电机,两个链轮轴B分别固定在主体框架的上下两端,三条平行设置的链条B分别挂放在两个链轮轴B的链轮上,在每条链条B上都均布安装有若干个挂板,下端的链轮轴B上还镶有一个链轮C,所述的链轮C通过链条C与链轮B连接,链轮B固定在减速机的轴上,提升电机连接减速机,所述的减速机安装在主体框架的底部,提升电机通过线缆与控制箱电连接,电机带动减速机旋转从而带动链轮B转动,链轮B通过链条C驱动链轮C转动,进而使三条平行的链条B从下向上运动,通过链条B上的挂板把工件套筒从料仓里提升出来送入传送装置。
所述的传送装置包括,传送电机、方管、链轮轴A、链条A、链轮A和接近开关,方管固定在主体框架上,在方管的两端安装有链轮轴A,两条平行设置的链条A挂放在两个链轮轴A的链轮上,在方管的一侧安装有传送电机,链轮A固定在传送电机的轴上,链轮A与链条A齿合,接近开关固定在方管右端的平面上,所述的接近开关和传送电机分别通过线缆与控制箱电连接,传送电机带动链轮A旋转,从而带动两条平行的链条A运转,使落入两个链条A上的工件套筒从链条A的一端输送至另一端,接近开关感应到信号后,通过固定在拨料气缸气缸杆上的推板将工件套筒推到斜坡支架上。
所述的斜坡支架带有一定倾斜角度,在斜坡支架的一端下面安装有上料气缸,落入斜坡支架上的工件套筒顺着斜坡滑落到斜坡支架底部,上料气缸接收到信号后动作,把工件套筒顶入到分选定位装置上。
所述的分选定位装置包括,底座、旋转气缸、感应器A、定位气缸A、导轨A、滑块A、右夹紧气缸、旋转电机、右夹紧滑动板、顶尖、套筒支架、模具、左夹紧气缸、感应器B和定位气缸B,在底座上从左到右依次安装有左夹紧气缸、旋转气缸和两条平行的导轨A,左夹紧气缸安装在底座左侧立板上,在左夹紧气缸的气缸杆上固定有模具,套筒支架固定在旋转气缸的轴上,在套筒支架里面固定有定位气缸A和定位气缸B,定位气缸A上安装有感应器A;定位气缸B上安装有感应器B,所述的感应器A和感应器B分别通过线缆与控制箱电连接,在两条导轨A上均滑动安装滑块A,右夹紧滑动板的底部固定在两个滑块A上,在右夹紧滑动板的上端安装有旋转电机,顶尖固定安装在旋转电机的轴上,在底座右面的立板上安装有右夹紧气缸,所述右夹紧气缸的气缸杆与右夹紧滑动板连接,旋转电机通过线缆与控制箱电连接。
所述的左夹紧气缸和右夹紧气缸同时动作,带动模具和顶尖将掉落至套筒支架上的工件套筒夹紧,通过旋转电机带动工件套筒旋转,旋转的同时定位气缸A和定位气缸B动作,定位气缸A和定位气缸B的气缸杆顶出。
当定位气缸A的气缸杆插入工件套筒的孔里,感应器A感应到信号,旋转电机停止旋转,定位气缸B复位,左夹紧气缸和右夹紧气缸复位松开工件套筒,旋转气缸旋转180°分选完成,等待抓取送料装置把分选好的工件套筒取走。
当定位气缸B的气缸杆插入工件套筒的孔里,感应器B感应到信号,旋转电机停止旋转,定位气缸A复位,左夹紧气缸和右夹紧气缸复位松开工件套筒,旋转气缸不动作,分选完成,等待抓取送料装置把分选好的工件套筒取走。
所述的抓取送料装置包括,底板支架、导轨B、送料气缸、滑板、抓料气缸、电磁铁和滑块B,底板支架固定在主体框架上,在底板支架上方设有两个平行设置的滑块B,在两个滑块B上均滑动安装有导轨B,滑板固定在两条导轨B上,在滑板的立板上安装有抓料气缸,两个电磁铁分别安装在抓料气缸的气缸杆上,电磁铁通过线缆与控制箱电连接,在底板支架的立板上安装有送料气缸,所述送料气缸的气缸杆与滑板连接,抓料气缸向下动作,使电磁铁落到分选好的工件套筒的上面,通过电磁铁把工件套筒吸住,此时,抓料气缸复位,送料气缸动作,带动滑板从而带动抓料气缸移动把工件套筒放入到指定位置,抓料气缸再向下动作,到位后电磁铁断电松开套筒,抓料气缸和送料气缸复位,等待抓取下一个工件套筒。
本发明通过提升装置、传送装置、分选定位装置和抓取送料装置,对料仓内的工件套筒进行提取、传送、分选定位后送入到指定位置,该分选机结合其它的自动装置,实现脚手架立杆全自动化生产,减少工人的劳动强度,提高生产效率。
附图说明
图1是本发明的正视图;
图2是本发明的左视图;
图3是本发明的右视图;
图4是本发明的后视图;
图5是本发明的俯视图;
图6是本发明分选定位装置的正视图;
图7是本发明的工件套筒结构示意图;
图8是本发明分选定位装置的俯视图;
图9是本发明分选定位装置的左视图;
图10是本发明抓取送料装置的正视图;
图11是本发明抓取送料装置的俯视图;
图12是本发明抓取送料装置的侧视图;
图13是本发明传送装置的正视图;
图14是本发明传送装置的侧视图;
图15是本发明传送装置的俯视图;
图16是本发明提升装置的侧视图;
图17是本发明提升装置的正视图。
图中:分选定位装置1、抓取送料装置2、斜坡支架3、拨料气缸4、控制箱5、推板6、传送装置7、主体框架8、上料气缸9、提升装置10、底座11、旋转气缸12、感应器A13、定位气缸A14、导轨A15、滑块A16、右夹紧气缸17、旋转电机18、右夹紧滑动板19、顶尖20、套筒支架21、模具22、左夹紧气缸23、感应器B24、定位气缸B25、底板支架26、导轨B27、送料气缸28、滑板29、抓料气缸30、电磁铁31、滑块B32、传送电机33、方管34、链轮轴A35、链条A36、链轮A37、接近开关38、减速机39、链轮B40、链轮C 41、挂板42、链条B43、链轮轴B44、链条C45、提升电机46、料仓47、工件套筒48、电磁气阀49。
具体实施方式
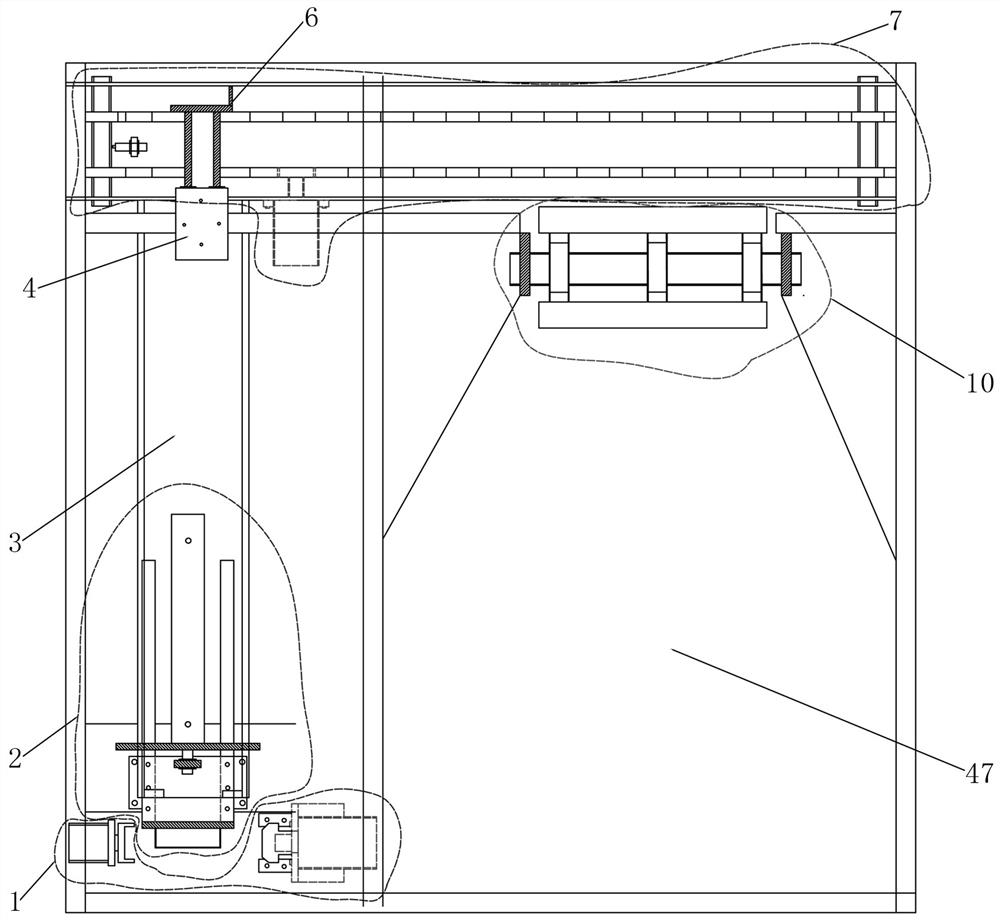
如图1、图2、图3、图4、图5、图7所示,在主体框架8的前面靠左侧顶部安装有抓取送料装置2,在主体框架8的中间位置安装有分选定位装置1,所述的分选定位装置1位于抓取送料装置2的正下方。在主体框架8的右侧设有用来放置工件套筒48的料仓47,传送装置7安装在主体框架8的后侧上部位置,提升装置10安装在料仓47与传送装置7之间。带有一定倾斜角度的斜坡支架3一端连接传送装置7,另一端连接分选定位装置1。上料气缸9安装在斜坡支架3的一端的下面。推板6固定在拨料气缸4的气缸杆上。电磁气阀49通过线缆与控制箱5电连接,电磁气阀49通过气管分别与对应的气缸连接。
如图16、图17所示,所述的提升装置10包括,减速机39、链轮B40、链轮C 41、挂板42、链条B43、链轮轴B44、链条C45和提升电机46,两个链轮轴B44分别固定在主体框架8的上下两端,三条平行设置的链条B43分别挂放在两个链轮轴B44的链轮上,所述每条链条B43上都均布安装有若干个挂板42。下端的链轮轴B44上还镶有一个链轮C41,所述的链轮C41通过链条C45与链轮B40连接,链轮B40固定在减速机39的轴上,提升电机46连接减速机39,所述的减速机39安装在主体框架8的底部,提升电机46通过线缆与控制箱5电连接。
如图13、图14、图15所示,所述的传送装置7包括,传送电机33、方管34、链轮轴A35、链条A36、链轮A37和接近开关38,方管34固定在主体框架8上,在方管34的两端安装有链轮轴A35,两条平行设置的链条A36挂放在两个链轮轴A35的链轮上。在方管34的一侧安装有传送电机33,链轮A37固定在传送电机33的轴上,链轮A37与链条A36齿合,接近开关38固定在方管34右端的平面上,所述的接近开关38和传送电机34分别通过线缆与控制箱5电连接。
如图6、图8、图9所示,所述的分选定位装置1包括,底座11、旋转气缸12、感应器A13、定位气缸A14、导轨A15、滑块A16、右夹紧气缸17、旋转电机18、右夹紧滑动板19、顶尖20、套筒支架21、模具22、左夹紧气缸23、感应器B24和定位气缸B25,在底座11上从左到右依次安装有左夹紧气缸23、旋转气缸12和两条平行的导轨A 15。左夹紧气缸23安装在底座11左侧立板上,在左夹紧气缸23的气缸杆上固定有模具22。套筒支架21固定在旋转气缸12的轴上,在套筒支架21里面固定有定位气缸A14 和定位气缸B25,在定位气缸A14上安装有感应器A13;在定位气缸B25上安装有感应器B24,所述的感应器A13和感应器B24分别通过线缆与控制箱5电连接。在两条导轨A 15上均滑动安装滑块A16,右夹紧滑动板19的底部固定在两个滑块A16上,在右夹紧滑动板19的上端安装有旋转电机18,顶尖20固定安装在旋转电机18的轴上。在底座11右面的立板上安装有右夹紧气缸17,所述右夹紧气缸17的气缸杆与右夹紧滑动板19连接,旋转电机18通过线缆与控制箱5电连接。
如图10、图11、图12所示,所述的抓取送料装置2包括,底板支架26、导轨B27、送料气缸28、滑板29、抓料气缸30、电磁铁31和滑块B32,底板支架26固定在主体框架8上,在底板支架26上方设有两个平行设置的滑块B32,在两个滑块B32上均滑动安装有导轨B27,滑板29固定在两条导轨B27上,在滑板29的立板上安装有抓料气缸30,两个电磁铁31分别安装在抓料气缸30的气缸杆上,电磁铁31通过线缆与控制箱5电连接。在底板支架26的立板上安装有送料气缸28,所述送料气缸28的气缸杆与滑板29连接。
在料仓47里倒满工件套筒48,提升电机46得电旋转,带动减速机39旋转从而带动链轮B40转动,链轮B40通过链条C45驱动链轮C41转动,进而使三条平行的链条B43从下向上运动,通过链条B43上的挂板42把工件套筒48从料仓47里提升出来落入到传送装置7的链条A36上。传送电机33得电旋转,带动链轮A37旋转,从而带动两条平行的链条A36运转,把工件套筒48从链条A36的一端输送至另一端,接近开关38感应到信号后,拨料气缸4动作,通过推板6将工件套筒48推到斜坡支架3上,工件套筒48顺着斜坡滑落到斜坡支架3底部,上料气缸9接收到信号后动作,把工件套筒48顶入到分选定位装置1的套筒支架21上,左夹紧气缸23和右夹紧气缸17同时动作,带动模具22和顶尖20把工件套筒48夹紧,夹紧后旋转电机18得电动作,带动工件套筒48旋转,旋转的同时定位气缸A14和定位气缸B25动作,定位气缸A14和定位气缸B25的气缸杆顶出。如果定位气缸A14的气缸杆插入工件套筒48的孔里,感应器A13就感应到信号,旋转电机18停止旋转,定位气缸B25复位,左夹紧气缸23和右夹紧气缸17复位松开工件套筒48,旋转气缸12旋转180°分选完成;如果定位气缸B25的气缸杆插入工件套筒48的孔里,感应器B24就感应到信号,旋转电机18停止旋转,定位气缸A14复位,左夹紧气缸23和右夹紧气缸17复位松开工件套筒48,旋转气缸12不动作,分选完成。等待抓取送料装置2把分选好的工件套筒48取走。抓取送料装置2取走工件套管48后,旋转气缸12再复位,等待下一个套筒落下来。抓料气缸30向下动作,使电磁铁31落到分选好的工件套筒48的上面,电磁铁31得电把工件套筒48吸住,抓料气缸30复位,然后送料气缸28动作,带动滑板29从而带动抓料气缸30移动把工件套筒48放入到指定位置后,抓料气缸30再向下动作,到位后电磁铁31断电松开套筒,抓料气缸30复位,送料气缸28也复位,等待抓取下一个工件套筒48。
- 脚手架立杆套筒自动分选机
- 脚手架立杆套筒自动上料、定位装置