一种磁电式转速传感器的模数转换电路
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及一种磁电式转速传感器的模数转换电路,属于传感器检测领域。
背景技术
转速传感器是一种能将转角位移转换成电信号的装置。磁电式转速传感器是利用电磁感应原理,将输入的运动速度转换成线圈中的感应电势输出。它直接将被测物体的机械能量转换成电信号输出,工作不需要外加电源,是一种典型的无源传感器。由于这种传感器有较大的输出功率、非接触测量,抗干扰性能好、配用电路较简单和性能稳定等优势而广泛应用于各种工业控制。磁电式转速传感器的典型应用如图1。
在工业控制中,为了获取各种导磁材料如:如齿轮、叶轮、带孔(或槽、螺钉)圆盘的转速及机械物体的位置,通常在被测量物体上做位置标记,例如在被检测飞轮中去掉一颗齿。由于磁场在飞轮缺齿位置的叠加和转速变化等因素,磁电转速传感器很容易产生很多毛刺。另一方面由于工业控制处理器只能接收数字信号,故需要数模转换接口电路将传感器输出的模拟信号转换为数字信号。使用低通滤波器的模数转换器很难完全消除传感器在缺齿位置产生的毛刺,从而造成定位机械物体的位置失败。
发明内容
针对上述现有技术存在的问题,本发明提出一种能够有效过滤磁电式转速传感器在飞轮缺齿位置毛刺的模数转换电路。
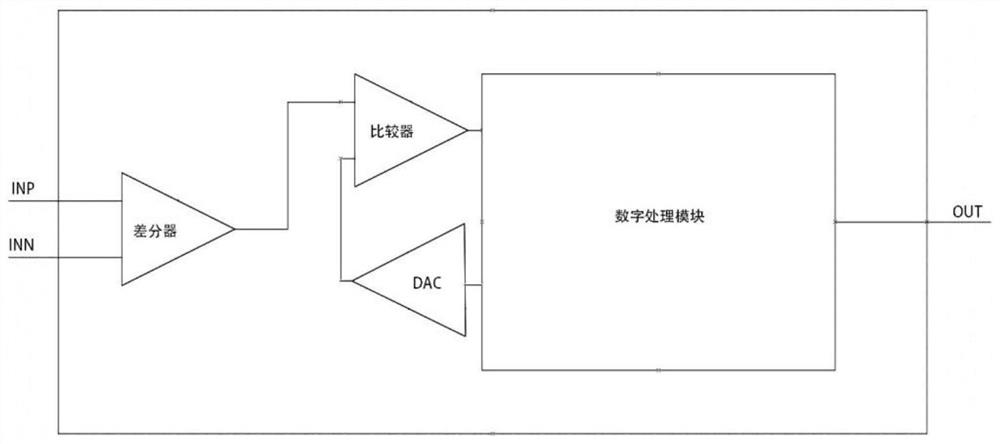
本发明采取的技术方案是:一种磁电式转速传感器的模数转换电路,其包括差分器,比较器,数字模拟转换器和数字处理模块,所述差分器的输入端连接转速传感器的信号输出端,差分器的输出端连接比较器的第一输入端,所述数字模拟转换器的输入端连接数字处理模块,数字模拟转换器的输出端连接比较器的第二输入端,比较器的输出端连接数字处理模块,所述数字处理模块包括数字滤波器和自适应调整比较器,其中数字滤波器包括依次相互串接的低通滤波器、动态带宽滤波器和边沿检测器。
进一步的,所述数字滤波器中第一级的低通滤波器为积分型数字低通滤波器;动态带宽滤波器为单边沿滤波器,其阈值根据动态调整算法进行调整;边沿检测器在每个正弦波的固定相位窗口内搜索上升沿或者下降沿,若搜索到则直接输出动态滤波器的结果,若没有搜索到有效的边沿则屏蔽配置的缺齿个数个周期。
进一步的,所述动态调整算法如下:
Step1:设置数字模拟转换器的初始值V
Step2:计算当前周期T
其中t为当前OUT电平由高转为低与上次OUT电平由高转为低的时间差t;
Step3:计算相邻周期变化DT
Step4:计算相邻周期差的变化DDT
Step5:预估下一个周期长度T;若T
若T
Step6:计算下一周期的数字滤波器的阈值Th;Th=P*T,其中P为固定或者可配置的系数;
Step7:计算下一周期的的DAC的值V
Step8:在OUT输出电平由高转低的时刻,根据Step6计算的数字滤波器的阈值Th更新数字滤波器阈值;同时根据Step7计算的DAC的值V
本发明的有益效果是:本发明能够有效过滤磁电式转速传感器在飞轮缺齿位置产生的毛刺,大大提高检测的准确性。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
图1是磁电式转速传感器的典型应用示意图;
图2是转速传感器模数转换电路的整体结构示意图;
图3是传感器输出波形图;
图4是数字滤波器结构示意图;
图5是本模数转换电路和低通滤波器输出对比图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。
如图2所示,一种磁电式转速传感器的模数转换电路,其特征在于,包括差分器,比较器,数字模拟转换器和数字处理模块,所述差分器的输入端连接转速传感器的信号输出端,差分器的输出端连接比较器的第一输入端,所述数字模拟转换器的输入端连接数字处理模块,数字模拟转换器的输出端连接比较器的第二输入端,比较器的输出端连接数字处理模块,所述数字处理模块包括数字滤波器和自适应调整比较器,其中数字滤波器包括依次相互串接的低通滤波器、动态带宽滤波器和边沿检测器。
本电路的工作原理:由于齿轮旋转方向,当某一颗齿轮齿接近转速传感器时,可能产生正向电压(即INP>INN),也可能产生负向电压(即INP 对应于齿轮上的每一颗齿,传感器输出一个类似正弦波,其中正弦波的峰峰值跟飞轮的转速相关。本专利的模数转换电路主要通过自适应动态调整比较器的参考电压和内部数字滤波器的带宽来实现。由于模拟部分差分器、比较器和DAC采用现有经典的结构,故不展开阐述。数字处理模块分为两大部分,数字滤波器和自适应调整比较器和滤波器带宽的算法。其中滤波器的结构如图4。 数字滤波器中第一级低通滤波器为积分型数字低通滤波器;动态带宽滤波器为单边沿滤波器,其阈值根据后面算法进行调整;边沿检测器在每个正弦波的固定相位窗口内(例如 [0,90°])搜索上升沿(或者下降沿),若搜索到直接输出动态滤波器的结果;若没有搜索到有效的边沿则屏蔽配置的缺齿个数个周期。 动态调整的算法如下: Step1:设置DAC的初始值V Step2:计算当前周期T 其中t为当前OUT电平由高转为低与上次OUT电平由高转为低的时间差t。 Step3:计算相邻周期变化DT Step4:计算相邻周期差的变化DDT Step5:预估下一个周期长度T;若T 若T Step6:计算下一周期的数字滤波器的阈值Th;Th=P*T,其中P为固定或者可配置的系数。 Step7:计算下一周期的的DAC的值V Step8:在OUT输出电平由高转低的时刻,根据Step6计算的数字滤波器的阈值Th更新数字滤波器阈值;同时根据Step7计算的DAC的值V 采用本模数转换电路和采用普通低通滤波器输出结果的对比图(图5)。 以上显示和描述了本发明的基本原理、主要特征和优点。本领域的普通技术人员应该了解,上述实施例不以任何形式限制本发明的保护范围,凡采用等同替换等方式所获得的技术方案,均落于本发明的保护范围内。 本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。
- 一种磁电式转速传感器的模数转换电路
- 一种适用于大间距测量的磁电式转速传感器