一种基于遥感技术与运动学原理的滑坡厚度反演方法
文献发布时间:2023-06-19 11:05:16
技术领域
本发明属于遥感测绘领域,具体涉及一种基于遥感技术与运动学原理的滑坡厚度反演方法。
背景技术
由于社会的发展和进步,人类文明再不断取得进步。而大规模的人类的活动所引起的水土流失,气候变化等问题也日渐凸显。自然灾害也有增多的趋势,特别是山区滑坡,黄土台塬滑坡等灾害。山区滑坡引起的危害巨大。近年来,滑坡地质灾害越来越受到各国政府和科研工作者的重视,越来越多的学者运用非接触式遥感技术研究滑坡的运动。试图通过各种遥感手段揭露滑坡的成因机制、判断滑坡运动规模、恢复滑坡运动过程等关键科学问题。
目前的遥感技术手段主要包括光学被动遥感和雷达主动遥感。光学遥感被动就是飞行器本身不发射能量,仅接收地物反射的太阳光。近年来较为热门的低空摄影测量技术属于光学遥感的范畴。雷达主动遥感是飞行器在飞行过程中发射电磁波并接收经地物反射后的电磁波。同样较为热门的合成孔径雷达干涉摄影(InSAR)技术属于雷达遥感的范畴。
传统的遥感技术对于滑坡位移的监测和厚度的反演存在较大的难度。目前靠遥感影像仅能靠目视解译的经验方法提取影像中的滑坡,而对于滑坡的平面位移大小,仅能通过影像对比,定性的分析,几乎不能定量的分析出滑坡平面位移的大小,更不能实现滑坡运动方向的可视化。合成孔径雷达干涉摄影测量(Interferometric Synthetic ApertureRadar)技术在一定程度上对滑坡的监测有作用。它能够识别潜在的滑坡并且能够监测到潜在滑坡微小的沉降,监测变形范围通常在几十毫米以内。对于剧烈变形以及已经明显滑动的滑坡则失去作用,原因是较大的位移会引起雷达影像失相干。
发明内容
针对背景技术中的问题,本发明提供了一种基于遥感技术与运动学原理的滑坡厚度反演方法,本方法克服了传统遥感技术仅定性、难量化的不足,为滑坡厚度的求取提供了新的方向。
为实现上述目的,本发明采用的技术方案如下所述:
一种基于遥感技术与运动学原理的滑坡厚度反演方法,包括:
S1、获取滑坡区域的光学遥感影像;
S2、结合光学遥感影像,在滑坡区域周围选定稳定区;
S3、利用光学遥感影像提取滑坡位移数据;
S4、利用滑坡位移数据对滑坡不同部位反演,确定不同部位的滑坡厚度;
S5、反演得到的滑坡厚度和常规技术得到滑坡厚度对比,评价结果精度。
所述获取的光学遥感影像需根据像素要求检查影像质量,并将符合要求的光学遥感影像裁剪成与滑坡范围同样大小的尺寸。
所述稳定区的选取要求为:水平位移小于1m。
所述利用光学遥感影像提取滑坡位移数据时,需对光学遥感影像的配准相关进行参数设置,需设置的参数包括窗口大小、步长和迭代次数。
所述提取滑坡位移数据为分段多组滑坡水平和垂直方向的位移,通过矢量相加和反三角函数确定具体位移的长度和方向。
所述反演方法为:
步骤一:提取滑坡的形变信息,包括位移的大小和方向以及位移场;
步骤二:判断滑坡的运动方式并求取滑坡厚度。
本发明的有益效果为:本发明首先通过光学遥感影像提取滑坡位移的大小和方向,弥补了其他遥感技术的短板。其次,在得到滑坡各期次滑坡的位移大小后,根据滑坡的实际运动情况将滑坡的运动抽象为线性的加速和减速过程,结合运动学模型,求取滑坡各部分的厚度。使滑坡位移的提取以及厚度的反演流程化,系统化。
该方法的提出解决了滑坡位移提取的难题,提取的位移具有大小和方向的信息,方便了滑坡位移场的可视化。在提取滑坡位移后,结合运动学原理和矢量分解与合成法则,可求出滑坡的厚度。该方法可在短时间内求取滑坡的位移和厚度,极大地方便了滑坡的监测并可为应急处置、工程治理提供重要参考。
附图说明
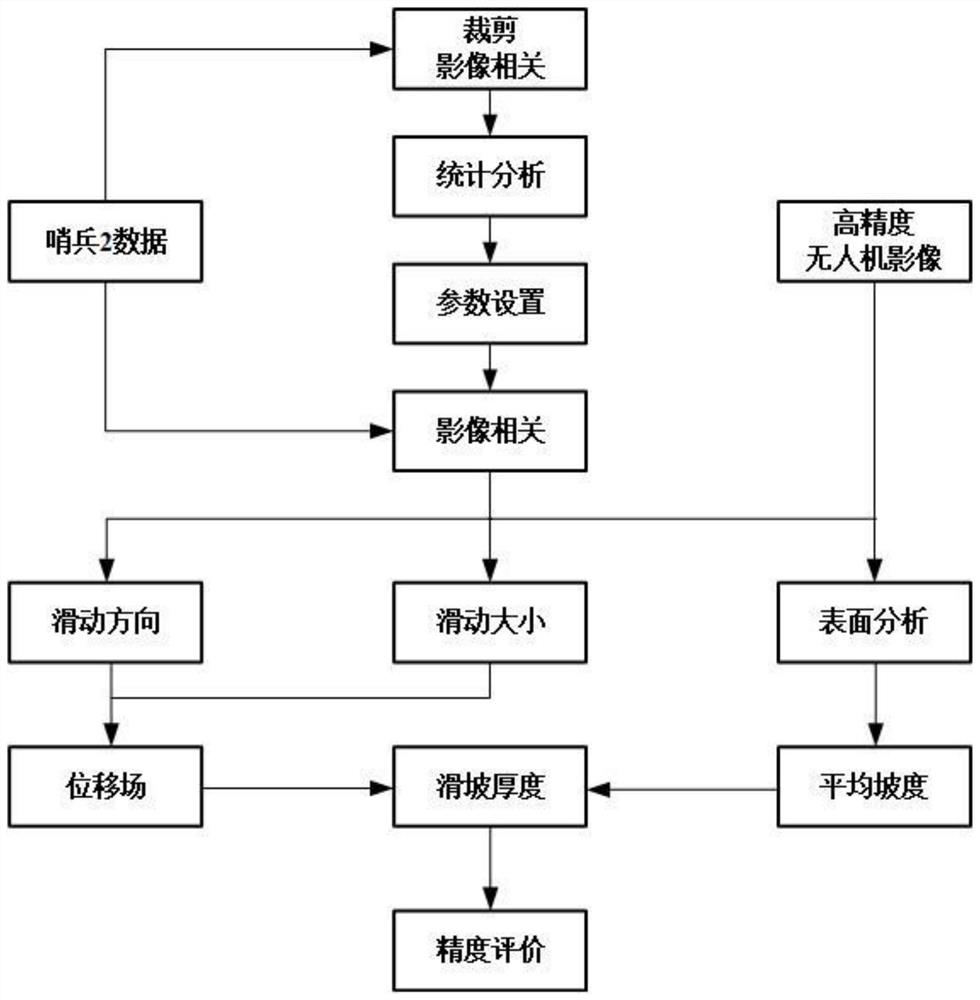
图1为本发明方法的流程图;
图2为实施例滑坡体及稳定区分布图
图3为实施例滑坡在8月10日至15日的位移图;
图4为实施例滑坡在8月10日至15日的位移方向图;
图5为实施例滑坡在8月10日至15日的运动位移场;
图6为实施例滑坡在8月10日至15日的坡脚局部位移场;
图7为实施例滑坡厚度反演矢量关系图。
具体实施方式
下面结合附图并通过具体的实施例进一步的说明本发明的技术方案:
实施例1:
如图1所示,本发明实施例提供的一种确定滑坡位移与滑坡滑动深度的方法,以某滑坡为案例,包括以下步骤:
本实施例选取高分辨率光学遥感影像,即5景Sentinel-2影像。影像拍摄时间分别为2019年7月4日、2019年7月31日、2019年8月3日、2019年8月10日和2019年8月15日,该段时间包含了滑坡的滑动过程。在提取滑坡位移之前,对每一景影像进行预处理。首先,裁剪研究区。Sentinel-2影像的幅宽为290公里,若直接处理则效率低,耗时长。
在进行影像相关之前,需要调整影像的大小,并将其切割成合适的大小。裁剪的影像覆盖了整个滑坡体和一个稳定区,稳定区用于后续的补偿校正。其次是选取Sentinel-2影像合适的波段。
哨兵2号卫星携带一个多光谱成像仪,可以覆盖13个光谱波段。不同的波段有不同的波长和分辨率。共有4个波段,分辨率为10m,分别为2波段、3波段、4波段和8波段。从这四个波段及其组合中选择合适的波段,因为它们的分辨率较高。对图像进行预处理,得到南北向位移、东西向位移和信噪比。信噪比通常用来评价相关结果,信噪比越大,结果越好。经过预实验及初步结果统计分析,确定合适的波段组合为组合波段,其形式为波段2、3、4的算术平均值。在进行正式的影像相关时,要确定合适的参数。确定参数时也进行预实验并对实验结果进行统计分析,结果表明合适的窗口大小为32-32,步长为1。
采用合适的波段组合以及处理参数对各期影像进行相关处理,分别得到两个方向(e/w和n/s)的位移分量。在arcgis软件中对两个位移分量进行波段计算得到位移的大小,其值是两个位移分量的平方根。
提取滑坡位移方向的操作如下,提取东西向位移场的正变形,再提取南北向(n/s)位移场对应的变形。根据公式
arccos(ns/deformation)*180/π
得到这部分的方向。同理,提取东西向(e/w)位移场的负变形,再提取相应的南北向(n/s)位移场的变形。最后再根据所写出的条件函数
con(arccos(ns/deformation)*180π)>90
arccos(ns/deformation)*180/π+90
360-arccos(ns/deformation)*180/π)
计算出滑坡另一部分的位移方向,进而求出整个滑坡的位移方向。
对于滑坡厚度的计算,根据实际监测数据得知滑坡在2019年7月31日前做匀加速运动,在2019年7月31至2019年8月15日做匀减速运动。滑坡于2019年7月16日启动,于2019年8月15日停止滑动。运用高精度数字高程模型提取滑坡坡度,其平均坡度为21°。以滑坡在8月10日至8月15日的滑动为例,其主要滑动发生在坡脚。
下面将阐释厚度反演过程:根据滑坡的实际运动情况将滑坡的运动抽象为线性的加速和减速过程,滑坡在8月10日沿21°的坡面以某一速度减速滑动,至8月15日停止滑动。基于光学影像相关的结果:滑坡底部平均位移17m,运动时间5天。可以求出滑坡底部的平均速率。根据匀减速运动模型,该阶段滑坡底部的平均速率等于滑动时间为一半时的瞬时速率,进而能求出该阶段滑坡的初始速率。再根据矢量关系,可以求出滑坡底部的平均厚度为6.2m。接下来求取8月3日至8月10日滑坡剧烈变形处的平均厚度。该阶段的末速率等于滑坡在8月10日至8月15日的滑动的初始速率。然后,基于该阶段光学影像相关结果求得对应的滑坡平均厚度为22.1m。同样地,运用速度迭代的思想,求出滑坡中部平均厚度为14.5m。最后求取滑坡上部厚度,其方法类似于求滑坡底部的思想,求得滑坡上部平均厚度为10.9m。将求得的结果与已有的高密度电法反演出的滑动面深度对面,结果置信度均在90%以上。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种基于遥感技术与运动学原理的滑坡厚度反演方法
- 一种基于地基合成孔径雷达遥感技术的路域滑坡监测装置