关节到泵高度水平用户界面、关节高度自动校准和关节压力估计
文献发布时间:2023-06-19 11:21:00
本申请要求2017年9月1日提交的标题为“Methods,Systems,And Devices ForJoint To Pump Elevation Level User Interfaces,Autocalibration For JointElevation,And Joint Pressure Estimation”的美国临时专利申请62/553,397的优先权,该专利申请据此全文以引用方式并入。
技术领域
本公开整体涉及用于关节到泵高度水平用户界面、关节高度自动校准和关节压力估计的方法、系统和装置。
背景技术
关节镜泵用于与多种功能相关的多种外科手术中,诸如软组织消融、外形修整、切割、凝固和温度控制。在外科手术的执行期间,关节镜泵可提供流体冲洗(流入)到手术部位,例如患者的关节,以及从手术部位吸取(流出)流体。泵可控制关节处的流体压力,以帮助提供关节扩张以便于进入,保持良好的可见性,和/或控制出血。然而,泵难以准确地测量关节处的流体压力,并因此难以准确地控制关节内的流体压力。例如,关节镜泵通常不测量关节处的流体压力,而是测量泵处的流体压力并对泵压力进行调节以估计关节处的流体压力。然而,如果泵和患者关节处于不同的高度,诸如如果泵位于比手术台上的患者高的高度处的推车上,则在泵处测量的流体压力将不会准确地反映关节处的流体压力。另外,流体通过管材和鞘在泵与关节之间行进,但是当通过泵的流量变化时,泵可能不会准确地考虑管材和鞘中的压力损失。此外,尽管关节镜泵可提供泵处的测量的流体压力的指示,但泵不会向外科医生指示测量的流体压力是在泵处,而不是关节处,这可导致外科医生将关节处的流体压力不适当地控制成过高或过低,因为提供给外科医生的信息并未准确地反映关节处的实际流体压力。
在一些系统中,可在关节处测量流体压力,诸如利用定位在关节处的传感器测量,但测量关节处的流体压力并将测量的流体压力传递到泵通常导致一次性管组的显著成本增加,这对于大多数医院和外科医生而言都是不可行的。
因此,仍然需要用于关节镜泵的改善的装置、系统和方法。
发明内容
一般来讲,提供了用于关节到泵高度水平用户界面的方法、系统和装置,用于关节高度自动校准的方法、系统和装置,以及用于关节压力估计的方法、系统和装置。
在一个方面,提供了一种外科系统,其在一个实施方案中包括具有流体泵的流体泵系统。流体泵系统被配置成通过管材在流体泵与手术部位之间泵送流体;测量流体泵处的流体压力;通过基于流体泵与手术部位之间的高度差和管材的类型中的至少一者调节测量的压力,来确定手术部位处的流体的估计压力;以及向流体泵的用户提供手术部位处的流体的估计压力的指示。
外科系统可以任意种方式变化。例如,流体泵系统可被配置成通过在流体泵系统的显示器上显示估计压力来提供估计压力的指示。又如,流体泵系统可被配置成通过感测流体泵处的流体室内的流体压力来测量流体泵处的流体的压力。
又如,流体泵系统可被配置成接收来自流体泵的用户的指示高度差的输入。在至少一些实施方案中,流体泵系统可被配置成在流体泵启动时自动提示用户提供输入,和/或流体泵系统可被配置成在泵处的显示器上提供高度差的视觉指示。
又如,流体泵系统的处理器可被配置成自动确定高度差。在至少一些实施方案中,处理器可被配置成在流体泵启动时自动确定高度差。
又如,流体泵系统可被配置成接收来自流体泵的用户的指示管材的输入。又如,流体泵系统可被配置成基于如确定的管材的类型通过基于流体泵处的冲洗马达的速度来测量压力而确定手术部位处的流体的估计压力。又如,流体泵系统可被配置成也基于与如确定的管材相关联的鞘的类型通过基于泵处的冲洗马达的速度来测量压力而确定手术部位处的流体的估计压力。又如,流体泵可以是关节镜流体泵。又如,手术部位可以是患者的关节。又如,流体泵系统可包括传感器,该传感器被配置成测量流体泵处的流体的压力,并且流体泵系统可包括处理器,该处理器被配置成从传感器接收测量的压力,确定估计压力以及将指示提供给用户。又如,流体泵可包括存储器,该存储器具有存储在其中的算法,并且流体泵可包括处理器,该处理器被配置成执行算法,从而使处理器确定估计压力。
又如,确定估计压力可包括估计手术部位流入处的损失。在至少一些实施方案中,估计流入处的损失可包括确定流体泵的马达的速度。
在另一方面,提供了一种外科方法,其在一个实施方案中包括通过管材在流体泵系统与手术部位之间泵送流体;测量流体泵系统的流体泵处的流体压力;通过基于流体泵与手术部位之间的高度差和管材的类型中的至少一者调节测量的压力,来确定手术部位处的流体的估计压力;以及向流体泵的用户提供手术部位处的流体的估计压力的指示。
外科方法可具有任何数量的变型。例如,提供估计压力的指示可包括在流体泵系统的显示器上显示估计压力。又如,测量流体泵处的流体的压力可包括感测流体泵处的流体室内的流体压力。
又如,该方法可包括在流体泵系统处接收来自流体泵的用户的指示高度差的输入。在至少一些实施方案中,该方法还可包括流体泵系统的流体泵在流体泵启动时自动提示用户提供输入,和/或通过改变代表流体泵的填充室的图标和代表手术部位的图标的相对位置,输入可改变流体泵相较于手术部位的相对高度水平的视觉表示。
又如,该方法可包括流体泵系统的处理器自动确定高度差。在至少一些实施方案中,流体泵系统在流体泵启动时自动确定高度差。
又如,该方法可包括接收来自流体泵的用户的指示管材的输入。又如,基于管材的类型来确定手术部位处的流体的估计压力可包括基于流体泵处的冲洗马达的速度来确定测量的压力。又如,流体泵可以是关节镜流体泵。又如,手术部位可以是患者的关节。又如,流体泵系统可包括测量流体泵处的流体的压力的传感器,并且流体泵系统可包括处理器,该处理器从传感器接收测量的压力,确定估计压力并且将指示提供给用户。又如,流体泵系统可包括存储器,该存储器具有存储在其中的算法,并且流体泵系统可包括处理器,该处理器被配置成执行算法,从而使估计压力得以确定。
又如,确定估计压力可包括估计手术部位流入处的损失。在至少一些实施方案中,估计流入处的损失可包括确定流体泵的马达的速度。
附图说明
通过以下结合附图所作的详细描述,将更充分地理解本发明,在附图中:
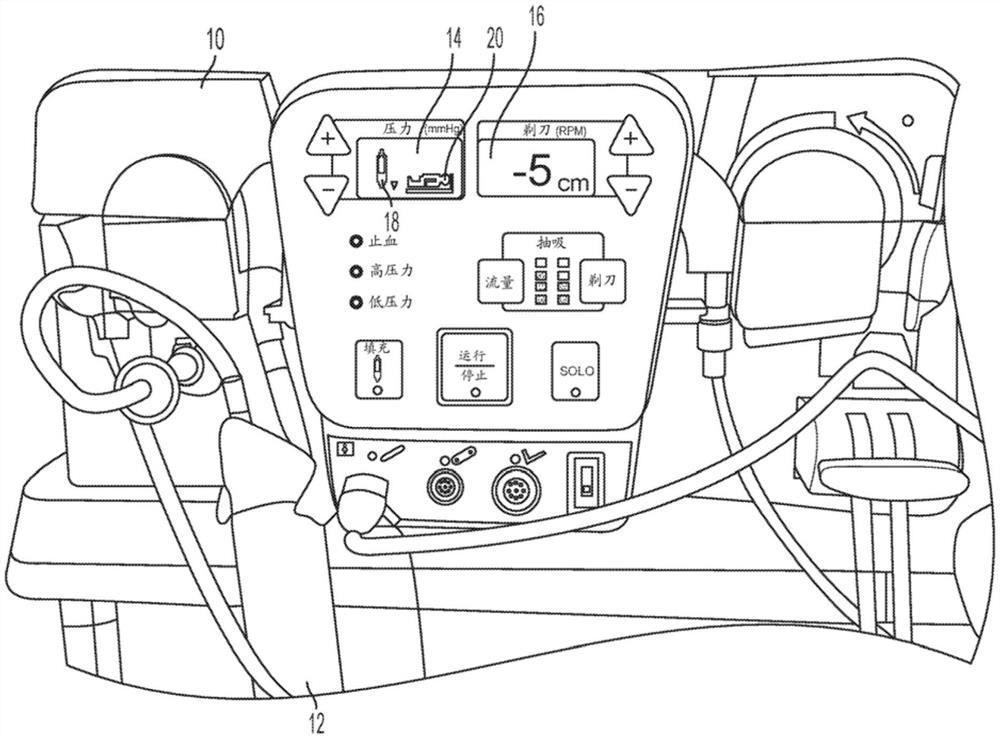
图1为关节镜流体泵的一个实施方案的透视图;
图1A为图1的泵的框图,该泵经由流入管材、鞘和流出管材可操作地联接到手术部位;
图2为图1的流体泵的显示,示出了流体泵与患者之间的一个高度差;
图3为图1的流体泵的显示,示出了流体泵与患者之间的另一个高度差;
图4为图1的流体泵的显示,示出了流体泵与患者之间的又一个高度差;
图5为示出图1的泵的流体控制算法的一个实施方案的框图;
图6为示出流体压力对时间的曲线图;
图7为示出流体压力对时间的另一个曲线图;
图8为示出流体压力对时间的又一个曲线图;并且
图9为示出三种不同流体流速下的流体压力的曲线图。
具体实施方式
现在将描述某些示例性实施方案以从整体上理解本文所公开的装置、系统和方法的结构、功能、制造和使用的原理。这些实施方案的一个或多个示例在附图中示出。本领域的技术人员将会理解,在本文中具体描述的和在附图中示出的装置、系统和方法是非限制性的示例性实施方案,并且本发明的范围仅由权利要求书限定。结合一个示例性实施方案示出或描述的特征结构可与其他实施方案的特征结构进行组合。此类修改和变型旨在包括在本发明的范围之内。
此外,在本公开中,各实施方案中名称相似的部件通常具有类似的特征结构,并因此在具体实施方案中,不一定完整地阐述每个名称相似的部件的每个特征结构。另外,在所公开的系统、装置和方法的描述中使用线性或圆形尺寸的程度上,此类尺寸并非旨在限制可结合此类系统、装置和方法使用的形状的类型。本领域的技术人员将认识到,针对任何几何形状可容易地确定此类线性和圆形尺寸的等效尺寸。系统和装置及其部件的尺寸和形状可至少取决于系统和装置将用于其中的受治疗者的解剖结构、系统和装置将与其一起使用的部件的尺寸和形状、以及系统和装置将用于其中的方法和规程。
提供了用于关节到泵高度水平用户界面的各种示例性方法、系统和装置,用于关节高度自动校准的方法、系统和装置,以及用于关节压力估计的方法、系统和装置。一般来讲,关节镜泵可被配置成估计手术部位处(例如关节处)的流体压力,以向用户(例如外科医生和其他医疗人员)提供流体压力的准确指示。因此,可准确地控制手术部位处的流体压力以改善手术结果。即使将外部流动装置插入关节中,手术部位处的流体压力也可被准确地控制。能够将实际关节压力准确地控制成小于60mmHg可有助于降低外科手术期间患者的风险,诸如通过降低由于压力过高而引起溢出的风险。在示例性实施方案中,流体压力估计基于泵处的流体压力测量,该流体压力测量在泵处例如通过泵处的处理器来调节,该处理器使用调节一个或多个因素的一种或多种控制算法执行存储在泵处的存储器中的指令。可用于估计流体压力的因素中的一个是管材中的压力损失,流体在泵与手术部位之间通过该管材流动。可用于估计流体压力的因素中的另一个是泵与手术部位之间的高度差。因此,不需要昂贵且专门的设备,诸如具有内置压力传感器的管材来测量手术部位本身处的流体压力。换句话讲,即使仅在泵处测量流体压力,也可确定手术部位处的流体压力的准确估计。
估计损失(例如,管材损失和鞘损失)可允许通过将其添加到手术部位压力设定点(例如,关节压力设定点)来控制手术部位压力,以更新泵压力控制回路中的泵压力设定点,该控制可快速执行。因此,控制回路可提供比直接控制手术部位压力更快的响应和更大的稳定性。
在某些外科设置中,泵可具有六英寸或更大的手术部位的高度差。在一些情况下,高度差可为多英尺,诸如当泵定位在手术台上的患者水平上方或下方的推车或搁架上时。虽然泵的使用说明(IFU)可警告此类相对于患者的泵定位,但IFU可能不总是被遵循,诸如由于手术室中的空间约束或由于固定的推车高度。一般来讲,手术部位与泵之间的高度差导致高度差每英尺22.4mmHg的误差。换句话讲,当手术部位和泵处于不同的高度时,在泵处测量的流体压力将不准确地反映手术部位处的流体压力,其中高度差越大,流体压力之间的差值越大。补偿高度差并提供手术部位处的流体压力的准确估计的能力可大大减少误差。
图1和图1A示出了包括关节镜泵10的泵系统的一个实施方案,该关节镜泵被配置成估计手术部位100处的流体压力。在示例性实施方案中,手术部位在关节诸如膝部或肩部处。泵10被配置成基于泵10与手术部位100之间的高度差和流体在泵10与手术部位100之间通过其流动的管材中的至少一者来随着手术的执行实时估计手术部位100处的流体压力。在示例性实施方案中,泵10被配置成基于这两个因素中的每一个来估计压力,但可仅使用这些因素中的一个来估计压力。流入管材102和流出管材104中的每一者具有相关联的鞘,在这种情况下,可基于管材102及其相关联的鞘来估计流体压力。
泵10可以具有多种配置。在例示的实施方案中,泵10包括被配置成将流体泵送到手术部位的冲洗泵,并且包括被配置成从手术部位泵送流体的吸扬式泵。泵10包括关节流入管材,以允许流体在泵10与手术部位之间流动。图1A示意性地示出了经由流入管材102可操作地连接到手术部位100的泵10,并且示出了返回到泵系统的吸扬式泵并随后来到废物贮存器的流出管材104。泵10还包括填充室或贮存器12,该填充室或贮存器用于使流体流动平滑并通过贮存器12的顶部处的感测管提供压力感测。在室12中的流体水平(例如水位)处感测压力,因此流体水平为有效压力传感器位置。
泵系统还包括处理器22,该处理器被配置成控制冲洗泵10和吸扬式泵。泵10被配置成基于贮存器12内的流体压力和泵马达速度(例如被配置成驱动泵10的马达24的速度)来测量泵10处的流体压力。泵10被配置成调节由处理器22控制的在泵10处测量的压力,以使用一种或多种控制算法来确定手术部位100处的估计压力,如下文进一步所述。一种或多种控制算法存储在泵系统的存储器26中并且可由处理器22执行。处理器22和存储器26示出为图1A中泵10的一部分,但在其它实施方案中,处理器22和/或存储器26可位于泵系统中的其它位置。
泵系统还包括被配置成有利于用户与泵10的交互的用户界面。用户界面包括第一显示器14,该第一显示器被配置成在执行外科手术期间利用泵10实时显示关节压力(在该例示的实施方案中以mmHg为单位)。示出在第一显示器14上的流体压力为手术部位处的估计流体压力。用户界面还包括第二显示器16,该第二显示器被配置成显示剃刀速度(在该例示的实施方案中以每分钟转数(RPM)为单位)。
用户界面还包括用户控件,该用户控件被配置成接收来自用户的输入以控制各种泵功能。在例示的实施方案中,用户控件包括用于控制第一显示器14上的信息的调节的可按压+/-(向上/向下)箭头按钮,以及用于控制第二显示器16上的信息的调节的可按压+/-(向上/向下)箭头按钮。在其它实施方案中,除按钮之外的控件可用于显示器14、16中的一者或两者,诸如旋钮、刻度盘、操纵杆、小键盘等。吸扬式泵流速由标记有FLOW+和SHAVER的按钮控制。FLOW+流量按钮被配置成用脚踏开关启动,并且SHAVER流量按钮被配置成在启用剃刀时被启动。例示的实施方案还包括启用填充室12的填充的按键和启用SOLO(仅冲洗泵)模式的按键。在其它实施方案中,FLOW+和SHAVER按钮中的一者或两者可具有另一种形式,诸如旋钮、刻度盘、操纵杆等。例示的用户界面还包括灯(例如,发光二极管(LED)等),该灯点亮以指示各种状况,诸如血液停止、高压警告、低压警报、FLOW+流速、SHAVER流速、启用的室填充、和泵打开/关闭(运行/停止)。
如上所述,泵10可被配置成通过考虑泵10与手术部位100之间的高度差来估计压力。例示的实施方案中的用户界面被配置成有利于泵对泵10与手术部位100之间的高度差的补偿。
第一显示器14被配置成在其上示出指示泵10和患者的相对高度的高度图标。在该例示的实施方案中,高度图标符合国际标准化组织(ISO)标准。如图1所示,高度图标包括呈泵填充室形式的具有填充水平的泵填充室图标18,以及手术台上呈患者形式的ISO批准的患者图标20,但也可使用其它形式的高度图标。填充水平指示压力正在被感测的水平。例如,图1中的填充室图标示出了部分填充的填充室,并且正是该填充水平指示泵压力被感测的水平,例如,零高度水平。泵10与手术部位100之间的高度差相对于零水平高度被限定,其中手术部位100处于零水平高度(例如,无高度差)、低于零水平高度、或高于零水平高度。
第二显示器16被配置成示出泵10例如填充室12的填充水平与患者处的手术部位100之间的高度差。第二显示器16上的患者图标20被配置成处于相对于泵填充室图标18的三个位置中的一个,以指示手术部位100升高到填充室12上方(处于上部位置的患者图标20)、手术部位100处于与填充室12相同的高度(处于中间位置或中性位置的患者图标20)、还是手术部位100低于填充室12(处于较低位置的患者图标20)。在例示的实施方案中,如图1所示,第二显示器16示出填充室12的填充水平与手术部位100之间的高度差为-5cm,从而指示手术部位100比泵10低5cm。因此,患者图标20相对于第一显示器14上的泵填充室图标18处于较低位置。在其它实施方案中,可通过具有患者图标20相对于泵填充室图标18的不止三个可能位置来使用更细致的患者图标20的位置。例如,相对于泵填充室图标18,患者图标20可能有五个位置:指示手术部位100与填充室12处于相同高度的位置;指示高于第一预定阈值高度差的高度的第一较高位置;指示高于第二预定阈值高度差的高度的第二较高位置,该第二预定阈值高度差大于第一预定阈值高度差;指示低于第三预定阈值高度差的高度的第一较低位置;以及指示低于第四预定阈值高度差的高度的第二较低位置,该第四预定阈值高度差大于第三预定阈值高度差。
用户界面被配置成允许用户使用与第一显示器14相关联的+/-箭头或作为另外一种选择与第二显示器16相关联的+/-箭头来调节高度差。例如,每按一次+箭头可以将高度差增加预定量,例如1cm、2cm、5cm、10cm等,而每按一次-箭头可以将高度差减少预定量,例如1cm、2cm、5cm、10cm等。随着高度差的调节,患者图标20相应地向上/向下移动,以提供相对于泵10的患者高度的视觉指示,并且具体地相对于泵10的填充室12中的流体水平。可示出指示填充室12的填充水平处于手术部位100上方的正非零高度差,其中患者图标20相对于第一显示器14上的泵填充室图标18,并且具体地相对于泵填充室图标18上的流体水平标记处于上部位置。例如,图2示出了第二显示器16上的+10cm的高度差,并因此患者图标20处于上部位置。可示出零高度差,其中患者图标20相对于第一显示器14上的泵填充室图标18,并且具体地相对于泵填充室图标18上的流体水平标记处于中间或中性位置。例如,图3示出了第二显示器16上的0cm的高度差,并因此患者图标20处于中间或中性位置。可示出指示填充室12的填充水平处于手术部位100下方的负非零高度差,其中患者图标20相对于第一显示器14上的泵填充室图标18,并且具体地相对于泵填充室图标18上的流体水平标记处于下部位置。例如,图4示出了第二显示器16上的-10cm的高度差,并因此患者图标20处于下部位置。高度差可高于+10cm或小于-10cm。例如,高度差可在-60cm至+90cm的范围内。
用户界面被配置成在泵10启动时将高度图标示出在第一显示器14上。例如,当电源被打开或当运行/停止按钮被按下以向泵发出“打开”信号时,用户通过显示器14、16中的一者或两者上的指示和/或通过可操作地连接到泵10的扬声器的可听指示来得到提示,以确认手术部位100和泵10的相对高度,具体地泵室12的填充水平。用户通过使用与第一显示器14相关联的+/-箭头根据需要调节高度来确认相对高度。因此,系统可具有准确的相对高度信息,处理器22稍后可在估计手术部位100处的流体压力时使用该信息。为了接受准确的所显示高度,用户按下运行/停止按钮。在用户手动输入相对高度之后,第一显示器14可继续显示高度图标或可相反地显示流体压力的数值,并且第二显示器16可继续显示高度水平或可相反地显示剃刀速度的数值。再一次按下运行/停止按钮将启动冲洗泵和吸扬式泵。
在至少一些实施方案中,可提供测量装置,该测量装置被配置成有利于用户对泵10的高度差输入。例如,泵10可具有安装在其上的机械测量装置,例如标尺等,用户可将其从泵10延伸到手术部位100,以允许使用视线测量手术部位的高度。安装到泵10的机械测量装置可为可回缩的(类似于卷尺),以有利于存放和/或易用性。又如,除了水平激光光源之外,泵10还可具有如上所述安装在其上的机械测量装置,以有利于手术部位高度的测量。水平激光光源可位于例如机械测量装置的端部。又如,机械测量装置可安装在泵10所在的推车上,并且可从推车延伸到手术部位,以允许使用视线测量手术部位的高度。安装到推车的机械测量装置可为可回缩的(类似于卷尺),以有利于存放和/或易用性。又如,泵10可具有安装在其上的滑动件,该滑动件具有安装在其上的线性编码器(磁性或光学)。滑动件可能够由用户选择性地上下移动,以使用视线通过线性编码器测量位置将滑动件的端部与手术部位100对准。又如,除了水平激光光源之外,泵10还可具有如上所述的滑动件,以有利于测量手术部位的高度。滑动件可由用户选择性地上下移动,以通过线性编码器测量位置将光束(例如,来自光源诸如激光点)与手术部位100对准。又如,泵10可包括被配置成测量泵10与手术部位100之间的高度差的激光干涉仪。
在至少一些实施方案中,不是用户手动输入泵10与手术部位100之间的高度差,而是将泵10配置成自动确定泵10与手术部位100之间的高度距离。在此类实施方案中,泵10被配置成在泵10启动时自动确定高度,使得泵10具有在泵10处于使用中时根据高度差来调节流体压力所需的相关信息。一般来讲,为了自动确定高度,泵10可被配置成使手术部位100的水平处的压力归零,以允许补偿手术部位100与泵10之间的任何高度差。
在泵自动校准的一个实施方案中,泵启动时用户将按下泵的用户界面上的运行/停止按钮。然后,图标将示出在第一显示器14和/或第二显示器16上,从而指示将进行压力校准。用户将保持连接到冲洗管材102的端部的鞘,该冲洗管材在泵10与手术部位100的水平处(例如,关节水平处)的手术部位100之间延伸,同时泵的冲洗阀打开,并且然后第二次按下运行/停止按钮。泵10可被配置成提示用户将鞘保持在手术部位100的水平处,诸如通过在显示器14、16中的一者或两者上的指示和/或通过可操作地连接到泵10的扬声器的可听指示。然后泵的冲洗泵将在流量控制模式下为其运行足够的时间以进行填装。此时,压力将被记录预定量的时间,例如,数个十分之一秒,并且取平均值。然后将增加冲洗流量以提供另一个压力数据点。在控制算法中,泵10(例如,其处理器22)将使用这两个压力对流量数据点,以估计手术部位100相对于泵10的高度以及管材和鞘中的损失。然后,该算法的结果将由泵10例如通过其处理器22进行极限检查,并且如果结果在预定公差内,则泵10将结束自动校准。自动校准的结束可由泵10指示,诸如通过可听声诸如蜂鸣声和/或通过显示器14、16中的一者或两者上的视觉指示。在自动校准结束时,按下运行/停止按钮将允许用户调节关节压力设定点和剃刀RPM速度设定点。再次按下运行/停止按钮将使泵10处于其正常的压力调节模式启动。
如上所述,除了泵10通过考虑泵10与手术部位100之间的高度差来估计压力之外或作为其替代,泵10还可被配置成通过考虑管材102、104以及与管材102、104相关联的鞘(如果存在)来估计压力。在至少一些实施方案中,泵10可被配置成允许用户输入管材尺寸和/或鞘尺寸。泵10可被配置成在评估由于在泵10与手术部位100之间延伸的管材和鞘而造成的压力损失补偿时使用输入尺寸。例如,泵的用户界面可包括可按压鞘尺寸控制按钮,该按钮允许用户使用与第一显示器14或第二显示器16相关联的+/-箭头来向上/向下调节鞘尺寸以反映当前鞘尺寸。再次按下鞘尺寸控制按钮可指示接受所显示的鞘尺寸。一般来讲,虽然在大多数关节镜手术中使用了高流量鞘,但通常将较小的低流量鞘用于小关节,并且导致关节压力的准确性降低。因此,允许鞘尺寸的输入将允许泵10在估计手术部位处的流体压力时补偿鞘尺寸。在其它实施方案中,除按钮之外的控件可用于输入鞘尺寸,诸如旋钮、刻度盘、操纵杆、小键盘等。除了可按压鞘尺寸控制按钮之外或作为其替代,泵的用户界面可包括可按压管材尺寸控制按钮,该按钮允许用户使用与第一显示器14或第二显示器16相关联的+/-箭头来向上/向下调节管材尺寸,以类似于上文关于鞘尺寸输入所述反映当前管材尺寸。在其它实施方案中,除按钮之外的控件可用于输入管材尺寸,诸如旋钮、刻度盘、操纵杆、小键盘等。
下面参考图5描述了泵系统可用于基于至少管材损失和鞘损失来估计和控制流体压力的控制算法的一个实施方案。在示例性实施方案中,如图5所示,控制算法以软件和硬件的组合实现。处理器22被配置成使用各种电子部件来执行控制算法,如本领域的技术人员将会理解的那样,诸如旋转编码器、马达/齿轮箱、压力换能器和接口/控制电路的泵部件。
该算法首先通过估计管材/鞘损失并将该压降添加到关节压力设定点来确定泵压力设定点。然后使用比例加积分(PI)控制器来控制泵压力控制回路。另外,施加来自抽吸泵的前馈控制以预期由吸扬式泵引起的突然的流量变化,诸如FLOW+和SHAVER流量。压力控制信号(来自PI控制器)与来自抽吸泵的前馈信号组合,向冲洗速度控制回路提供速度命令。图5示出了冲洗泵控制回路。泵压力设定点基于管材和鞘中的估计损失进行更新。估计算法定期更新,而不是仅当改变流动模式时更新。定期可为在泵系统的使用期间的多种预定间隔中的任一种,诸如每X秒、每Y分钟等。
冲洗泵被配置成控制手术部位处的压力,例如,在执行关节镜手术的手术关节中。然而,压力不是在关节处测量,而是仅在泵处(例如,在填充室中)测量。因此,为了调节关节压力,估计管材/鞘损失,并且然后将其添加到所需的关节压力P
管材/鞘损失[mmHg]=4.70*ω
角速度通过使用冲洗编码器中断来计算,以确定连续编码器脉冲之间的时间(与抽吸泵速度计算相同)。如下确定每秒计数的编码器中的速度:
速度=1406250[clkPulses/sec]/编码器脉冲之间的时间
当定时器中断未发生达5毫秒(通过2KHz定时器中断为10次)时,速度将报告为零。将速度命令定期更新为用于压力调节的压力回路PI(比例、积分)控制器的输出。定期可为在泵系统的使用期间的多种预定间隔中的任一种,诸如每X秒、每Y分钟等。压力控制系统使用与抽吸泵相同的速度控制策略,因此压力控制器(PI)向速度控制回路提供速度命令,并且该更新用于控制器计算。压力回路PI控制器在2KHz定时器中断中更新,该定时器中断也用于控制抽吸泵和剃刀。然而,压力控制算法仅通过等于32msec的ISR(中断服务例程)每64次更新一次。这是足够的,这是由于压力控制回路的低闭合回路带宽(即<2Hz)。PI控制器公式如下,其中Kp=400,Ki=0.222,Kd=0.0,suctionFeedForward=抽吸速度*冲洗/抽吸泵的效率比:
setPointPumpPress=setPointJointPress+TubeSheathLoss
Pcontrol=误差*Kp+SUM_ERROR*Ki-Kd*dErr
VELCMD=Pcontrol+suctionFeedForward
为确定更新的泵压力设定点,以上公式是在定期预定基础上(例如,每32msec)执行的,然而,TubeSheathLoss仅在泵压力已稳定时更新:如果连续读数(以例如500msec间隔)在彼此的例如2mmHg内。
控制回路用于调节抽吸(吸扬式)泵的角速度。虽然可使用电流反馈和速度反馈两者,但不需要电流反馈。控制器输出使用20KHz PWM输出比较定时器向马达提供PWM占空比。另外,向PWM输出提供速率限制,使得脉冲在每个转变时匀变以消除马达在2KHz下的脉冲,这肯定是可听到的。速率限制为10encoderCnts/2KHz中断。这意味着马达可在0.8秒内从零达到最大速度。
为了改善对抽吸流中SHAVER或FLOW+阶跃变化的响应时间,由抽吸马达速度命令提供马达速度前馈项。这有助于关节压力控制回路预期局部(即由此泵造成的)流量扰动,诸如启用或禁用SHAVER或FLOW+。抽吸速度前馈与泵效率比相乘以在冲洗泵中提供正确的稳态前馈流量补偿,以抵消抽吸泵中的附加流量。匀变被施加到抽吸前馈速度,以尝试抵消用于SHAVER或FLOW+流量的抽吸泵中的速度匀变。前馈抽吸速度补偿与PID控制器的输出组合,以向用于冲洗泵的速度控制回路提供速度命令。该速度控制回路与抽吸泵相同。
为防止对所显示的关节压力的快速更新的干扰,所显示的压力为每半秒更新的估计关节压力和附加的过滤。出厂默认关节压力设定为70mmHg,但用户可使用默认菜单更新默认值。在其它具体实施中,出厂默认压力设定为50mmHg。
抽吸泵操作仅要求用户按下RUN按钮,只要不选择SOLO模式并且泵系统的门关闭。假定不存在诸如泵马达的过电流之类的故障。
冲洗(流入)泵控件使用2KHz定时器和两个单独的控制机构压力装置(两个压力传感器)以及速度装置(高速编码器)来控制马达速度。图5示出了用于调节压力的总体控制回路。
当泵处于RUN模式时,2KHz回路连同以下状态图处理执行以下操作:(1)压力控制器使用来自两个模拟通道(ADC)的读数来确定压力传感器处的压力设定点与实际压力读数之间的差值。将这些信号一起读取并取平均值。基于该差值(误差),确定被馈送到马达控制回路的速度部分中的新命令PWM占空比计数值;以及(2)速度控制器使用来自与输入捕获比较定时器相关的高速编码器(频率)的反馈。使用在先前步骤中确定的命令计数和马达的速度频率,计算PWM命令输入的新占空比。然后将该命令馈送到与流入马达相关联的PWM控制寄存器中。PWM频率为例如20Khz。监测和比较两个压力信号以确保它们在预定阈值内准确,例如彼此相差+/-10%。
图6-8是示出其中泵处的流体压力(例如,在泵的填充室的填充水平处测量的压力)不同于手术部位处的流体压力的各种场景的曲线图。这些示出的泵处的压力与手术部位处的压力之间的差值有助于突显估计手术部位处的压力而不是考虑在泵处测量的压力以准确反映手术部位处压力的重要性。
针对流体泵处压力以及手术部位(在该实施方案中为关节)的估计压力,该估计压力通过流体泵使用高度和管材/鞘的损失的补偿计算,图6为示出响应于30mmHg阶跃(70mmHg至100mmHg)的压力(以mmHg为单位)对时间(以十分之一秒为单位)的曲线图。该曲线图示出,流体泵处的压力仅与手术部位处的估计压力稍有不同。
图7为示出响应于约350mL/min的流量的阶跃变化的压力(以mmHg为单位)对时间(以十分之一秒为单位)的曲线图,该变化源于从约5sec至约250sec的内部剃刀抽吸源活动。该曲线图示出流体泵处的压力随着流量的增加而增大,以便在剃刀被启用时调节关节压力。
图8为示出响应于约350mL/min的流量的阶跃变化的压力(以mmHg为单位)对时间(以十分之一秒为单位)的曲线图,该变化源于从约5sec至约25sec的外部抽吸源活动。该曲线图示出流体泵处的压力增大,以调节手术部位处的压力。
图9为示出使用本文所述的流体压力估计来控制手术部位处的流体压力的有效性的曲线图。图9的曲线图示出了三种不同流体流速下的压力(以mmHg为单位):空闲流量、中等流量和高流量。该曲线图示出,通过估计如本文所述的手术部位处的流体压力,手术部位处的流体压力可被准确地控制,以允许外科医生使用较低的压力设定点,这可有助于通过将流体压力保持在安全水平来改善患者安全性,例如,帮助减少溢出的风险,或以其它方式帮助改善患者安全性。该示例中的压力设定点为50mmHg,并且该示例中的部位压力在空闲流量下为47mmHg,在中等流量下为49mmHg,并且在高流量下为43mmHg,这在此类流量范围内是非常好的压力调节。
本领域的技术人员将会理解,本发明已应用于常规微创和开放式外科器械中,以及机器人辅助的外科手术中。
基于上述实施方案,本领域的技术人员将会认识到本发明的另外的特征和优点。因此,本发明不应受到已具体示出和描述内容的限制,除非所附权利要求有所指示。本文引用的所有出版物和参考文献全文明确地以引用方式并入本文。
- 关节到泵高度水平用户界面、关节高度自动校准和关节压力估计
- 磁性关节水平线高度可调的万用激光垂准水平仪