防跌落装置、机器人和防跌落方法
文献发布时间:2023-06-19 11:22:42
技术领域
本申请涉及自动控制领域,特别涉及一种防跌落装置、机器人和防跌落方法。
背景技术
目前机器人的定位导航技术,使用的都是2D平面的激光雷达,只能检测到略高于激光雷达安装高度的障碍物。因此机器人在运行中存在较大的盲区,无法感知到会影响到机器人运行的特殊地形,如果跌落台阶或坑洞,将对机器人造成严重损害。
发明内容
本申请实施方式提供了一种防跌落装置、机器人和防跌落方法,可以自动检测到台阶或者坑洞等,防止机器人跌落。
本申请实施方式提供了一种防跌落装置,所述防跌落装置包括:3D点云获取装置,所述3D点云获取装置用于获取目标区域内的3D点云数据,用以确定各像素点的第一空间坐标;其中,各所述像素点的第一空间坐标用于表征所述像素点相对于所述3D点云获取装置的空间位置;所述3D点云获取装置搭载于机器人的前端;第一处理单元,所述第一处理单元用于基于所述3D点云获取装置与所述机器人的底盘中心的相对位置关系和相对角度关系,将各所述像素点的所述第一空间坐标转化为第二空间坐标;其中,各所述像素点的第二空间坐标用于表征各所述像素点相对于所述机器人的底盘中心的空间位置;第二处理单元,所述第二处理单元用于至少基于各所述像素点的第二空间坐标,评价所述目标区域对应的路况的通行能力;其中,评价所述通行能力的维度至少包括跌落风险。
在一个实施方式中,所述3D点云获取装置为双目摄像头。
在一个实施方式中,所述双目摄像头位于距地面高度50cm,所述双目摄像头水平向下的俯视角度为15°,所述双目摄像头的FOV为水平方向90°垂直方向60°。
在一个实施方式中,所述第二处理单元还用于基于各所述像素点的第二空间坐标,确定所述目标区域对应的路况;在所述目标区域存在相对于地面低于或等于向下台阶高度阈值的区域时,确定该路况为存在向下台阶的路况;在所述目标区域存在低于地面且高于向下台阶高度阈值的区域时,确定该路况为存在坑洞的路况;在所述目标区域存在相对于地面高于或等于向上台阶高度阈值的区域时,确定该路况为存在向上台阶的路况。
在一个实施方式中,还包括:所述机器人至少具有以下防跌落能力值之一:针对向下台阶的第一防跌落能力值、针对坑洞的第二防跌落能力值;评价所述第一防跌落能力值至少包括以下维度之一:可跨越台阶深度、可跨越台阶宽度;评价所述第二防跌落能力值至少包括以下维度之一:可跨越坑洞深度、可跨越坑洞宽度、可跨越坑洞长度、可跨越坑洞面积。
在一个实施方式中,所述第二处理单元还基于前进方向角来评价所述通行能力的跌落风险;所述前进方向角为所述机器人的前进方向与向下台阶或坑洞的水平垂直方向的夹角。
在一个实施方式中,所述第二处理单元还用于将所述机器人的防跌落能力值与所述目标区域对应的路况的通行能力匹配;在符合通行要求的情况下,所述机器人按原路径行驶;否则,重新规划路径。
在一个实施方式中,所述第二处理单元还用于在所述机器人的防跌落能力值不符合所述目标区域对应的路况的通行能力的情况下;获取到当前道路的宽度数据;基于当前道路的宽度数据,确定剩余通行道路的宽度数据;在该宽度数据大于等于所述机器人通行的宽度数据的情况下,在当前道路基础上规划绕行路线。
在一个实施方式中,所述第二处理单元还用于在所述剩余通行道路的宽度数据小于所述机器人通行的宽度数据的情况下,重新规划所述机器人路径,该路径绕开当前道路。
本申请实施方式还提供一种机器人,所述机器人搭载有如上述任意一项所述的防跌落装置;所述机器人还包括:导航模块、报警装置;所述导航模块用于规划所述机器人的路径;所述报警装置用于在接收到所述防跌落装置发出的跌落警示信号的情况下,发出用于提示的光信号和声音信号。
在一个实施方式中,所述机器人还包括:手动控制模块;所述手动控制模块包括:手动导航控制信号发射器和手动导航控制接收器;所述手动导航控制接收器位于所述机器人;所述机器人的控制系统在接收到所述防跌落装置发出的跌落警示信号的情况下,控制所述机器人停止前进;在所述机器人处于手动导航模式的情况下,所述手动导航控制信号发射器用于接收用户的输入信号,并向所述手动导航控制接收器发送控制信号,以控制所述机器人行进。
本申请实施方式还提供一种防跌落方法,包括:获取目标区域内的3D点云数据,所述3D点云数据用于确定各像素点的第一空间坐标;其中,各所述像素点的第一空间坐标用于表征所述像素点相对于所述3D点云获取装置的空间位置;所述3D点云获取装置搭载于机器人的前端;基于所述3D点云获取装置与所述机器人的底盘中心的相对位置关系和相对角度关系,将各所述像素点的所述第一空间坐标转化为第二空间坐标;其中,各所述像素点的第二空间坐标用于表征各所述像素点相对于所述机器人的底盘中心的空间位置;至少基于各所述像素点的第二空间坐标,评价所述目标区域对应的路况的通行能力;其中,评价所述通行能力的维度至少包括跌落风险。
在一个实施方式中,所述3D点云获取装置为双目摄像头;所述双目摄像头位于距地面高度50cm,所述双目摄像头水平向下的俯视角度为15°,所述双目摄像头的FOV为水平方向90°垂直方向60°。
在一个实施方式中,在评价所述目标区域对应的路况的通行能力的步骤中还包括:基于各所述像素点的第二空间坐标,确定所述目标区域对应的路况;在所述目标区域存在相对于地面低于或等于向下台阶高度阈值的区域时,确定该路况为存在向下台阶的路况;在所述目标区域存在低于地面且高于向下台阶高度阈值的区域时,确定该路况为存在坑洞的路况;在所述目标区域存在相对于地面高于或等于向上台阶高度阈值的区域时,确定该路况为存在向上台阶的路况。
在一个实施方式中,还包括:获取所述机器人的防跌落能力值;所述防跌落能力值至少包括以下之一:针对向下台阶的第一防跌落能力值、针对坑洞的第二防跌落能力值;评价所述第一防跌落能力值至少包括以下维度之一:可跨越台阶深度、可跨越台阶宽度;评价所述第二防跌落能力值至少包括以下维度之一:可跨越坑洞深度、可跨越坑洞宽度、可跨越坑洞长度、可跨越坑洞面积。
在一个实施方式中,在评价所述目标区域对应的路况的通行能力的步骤中还包括:基于前进方向角,评价所述通行能力的跌落风险;所述前进方向角为所述机器人的前进方向与向下台阶或坑洞的水平垂直方向的夹角。
在一个实施方式中,所述方法还包括:将所述机器人的防跌落能力值与所述目标区域对应的路况的通行能力匹配;在符合通行要求的情况下,所述机器人按原路径行驶。
在一个实施方式中,在所述机器人的防跌落能力值不符合所述目标区域对应的路况的通行能力的情况下;基于导航场景的平面信息,重新规划路径;或,向所述机器人的控制系统发送跌落警示信号,以用于所述机器人的控制系统控制所述机器人停止前进;或,将所述机器人自动导航模式切换为手动导航模式,以用于用户通过手动控制模块控制所述机器人行进。
在一个实施方式中,在基于导航场景的平面信息,重新规划路径的步骤中包括;
获取到当前道路的宽度数据;基于当前道路的宽度数据,确定剩余通行道路的宽度数据;在该宽度数据大于等于所述机器人通行的宽度数据的情况下,在当前道路基础上规划绕行路线。
在一个实施方式中,在所述剩余通行道路的宽度数据小于所述机器人通行的宽度数据的情况下,重新规划所述机器人路径,该路径绕开当前道路。
在本申请实施方式中,通过所述3D点云获取装置获取获取目标区域内的3D点云数据,用以确定各像素点的第一空间坐标;将所述第一坐标转化为第二空间坐标;其中,各所述像素点的第二空间坐标用于表征各所述像素点相对于所述机器人的底盘中心的空间位置;至少基于各所述像素点的第二空间坐标,评价所述目标区域对应的路况的通行能力;其中,评价所述通行能力的维度至少包括跌落风险。可以防止所述机器人从台阶或者坑洞上跌落。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
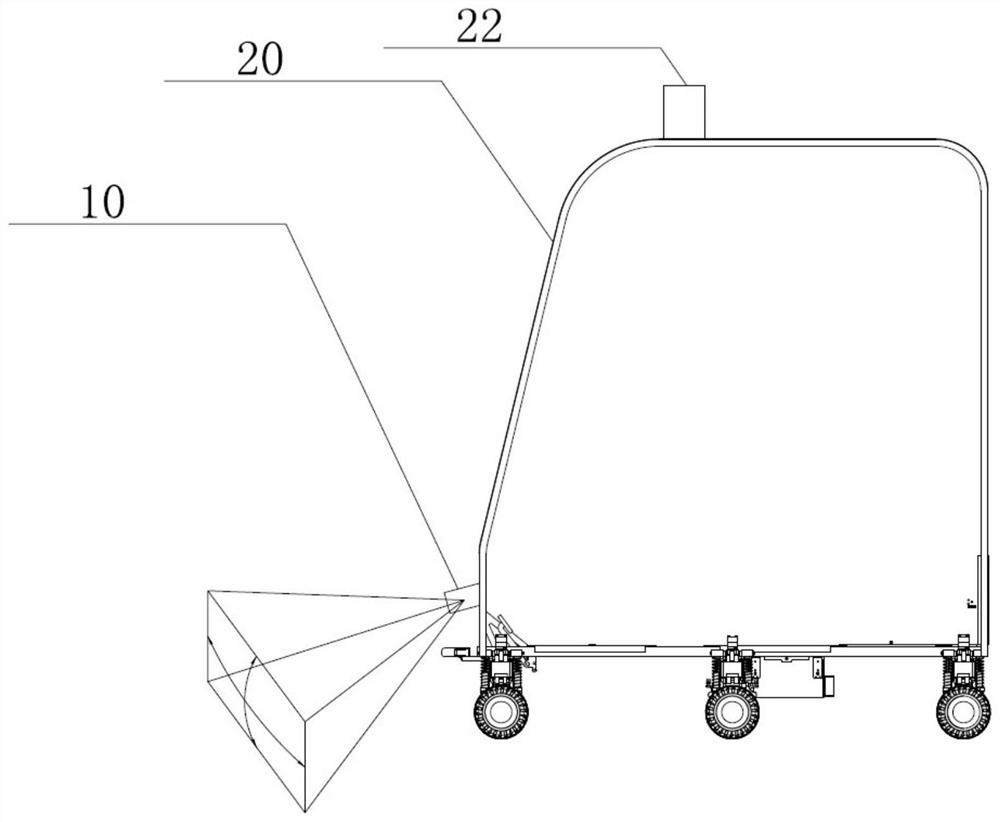
图1是本说明书实施方式的一个防跌落机器人示意图;
图2是本说明书实施方式的一个防跌落机器人系统示意图;
图3是本说明书实施方式的一个防跌落机器人遇到向下台阶的示意图;
图4是本说明书实施方式的一个防跌落机器人遇到坑洞的示意图;
图5是本说明书实施方式的一个防跌落机器人倾斜遇到台阶的示意图;
图6是本说明书实施方式的另一个防跌落机器人遇到坑洞的示意图;
附图说明:10、3D点云获取装置,20、机器人本体,22、报警装置。
具体实施方式
为了使本技术领域的人员更好地理解本申请中的技术方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。本文中在本申请的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本申请。
请参阅图1和图2,图1为本说明书实施方式提供一种防跌落装置及搭载所述防跌落装置的机器人示意图。图2为本说明书提供的一个防跌落机器人系统图。
在本实施方式中,所述防跌落机器人搭载有防跌落装置,以用于在碰到向下台阶或坑洞时可以紧急避险。所述防跌落装置可以包括有3D点云获取装置10和处理器,所述处理器可以包括第一处理单元和第二处理单元。所述3D点云获取装置10可以位于所述机器人的前端。在所述机器人行进时,所述3D点云获取装置10可以获取所述机器人前方目标区域的3D点云数据,并发送给处理器。所述处理器可以根据所述目标区域内的3D点云数据,确定该目标区域内的路况的通行能力。在所述机器人存在跌落的风险时,所述处理器可以向所述机器人的驱动控制系统发送紧急控制名命令,以控制所述机器人行进。同时,还可以向机器人报警系统发送跌落危险信号,以用于机器人发送用于提示的光信号或声音信号,例如警报声等。
请参阅图1。本说明书实施方式提供一种防跌落装置,所述防跌落装置可以包括:3D点云获取装置10、第一处理单元、第二处理单元。
3D点云获取装置10,所述3D点云获取装置10用于获取目标区域内的3D点云数据,用以确定各像素点的第一空间坐标;其中,各所述像素点的第一空间坐标用于表征所述像素点相对于所述3D点云获取装置10的空间位置;所述3D点云获取装置10搭载于机器人的前端。
在本实施方式中,所述3D点云获取装置10用于获取目标区域内的3D点云数据。所述3D点云获取装置10可以是一个或多个双目摄像头,也可以是3D的激光雷达。所述目标区域可以是指所述3D点云获取装置10视角区域范围。在一个实施方式中,所述双目摄像头位于距地面高度50cm,所述双目摄像头水平向下的俯视角度为15°,所述双目摄像头的FOV为水平方向90°垂直方向60°。该种布置方式适用性较好,所述机器人可以有效的预防跌落。在本实施方式中,3D点云数据可以是RGBD数据。
在本实施方式中,所述3D点云数据可以与所述3D点云获取装置10的内参相结合,以得到该目标区域相对于所述3D点云获取装置10的第一空间坐标。具体的,例如,所述3D点云获取装置10为一个双目摄像头,该双目摄像头相机的位置为第一空间坐标系的原点坐标,以该双目摄像头的角度,确定该坐标系的基准轴。该目标区域内的3D点云数据,结合原点坐标和基准轴,得到该目标区域内每个像素点的(x,y,z)坐标。在本实施方式中,每个像素点可以对应于所述目标区域内的每个点。
第一处理单元,所述第一处理单元用于基于所述3D点云获取装置10与所述机器人的底盘中心的相对位置关系和相对角度关系,将各所述像素点的所述第一空间坐标转化为第二空间坐标;其中,各所述像素点的第二空间坐标用于表征各所述像素点相对于所述机器人的底盘中心的空间位置。
在本实施方式中,所述第一处理单元用于将所述目标区域内的像素点相对于所述3D点云获取装置10的所述第一空间坐标转化为相对于所述机器人的底盘中心的第二空间坐标。具体的,例如,在第一空间坐标系中是所述3D点云获取装置10正方向为Z轴的空间坐标。而在第二空间坐标系中,是以所述机器人的底盘中心前进方向的垂直方向为所述第二空间坐标系的Z轴。再结合所述3D点云获取装置10与所述机器人的底盘中心的相对位置,获得所述目标区域内每个像素点相对于所述机器人的底盘中心的空间坐标,以更加直观的来分析跌落风险等。
在本实施方式中,可以基于各所述像素点的第二空间坐标,计算获得凹陷区域的面积、长度、深度、宽度等,也可以计算获得凸起区域的形状、大小、高度等,可以供所述第二处理单元进一步判断该目标区域的路况。
第二处理单元,所述第二处理单元用于至少基于各所述像素点的第二空间坐标,评价所述目标区域对应的路况的通行能力;其中,评价所述通行能力的维度至少包括跌落风险。
在本实施方式中,所述通行能力可以用于表征所述目标区域对应路况供机器人平稳通行的能力。所述通行能力可以包括多个维度,例如,路面平整度的维度、路面障碍物大小、多少和高度的维度,以及对应跌落风险的维度等。所述跌落风险的维度可以是指在所述机器人在通行该区域时,因道路侧原因造成所述机器人跌落的风险值。例如,该区域上存在深坑和向下台阶等,深坑越深越大,无疑对应的跌落风险越大。在一个场景示例中,基于所述目标区域各所述像素点的第二空间坐标,得到该区域路面平整度的整体评分80分;存在一个向上的5公分的凸起,在路面障碍物评分为60分;存在一个长1米、宽0.1米、深度0.2米的深坑,在跌落风险的评分为10分。基于上述评分,通过加权等方式可以得到该目标区域的整体评分以表征该区域的通行能力。当然,每个维度也可以是A、B、C、D等进行评级,此处不做具体赘述。
当然,在一个实施方式中,也可以设定只要所述目标区域的像素点中,存在小于等于预设个数的像素点的第二空间坐标的高度值超过或低于高度阈值时,则认为所述目标区域对应的路况的通行能力不满足所述机器人。
在本实施方式中,至少基于各所述像素点的第二空间坐标,评价所述目标区域对应的路况的通行能力;其中,评价所述通行能力的维度至少包括跌落风险。具体的,评价所述通行能力时,包括跌落风险的维度。
在本实施方式中,所述第一处理单元和所述第二处理单元可以统一集成于所述机器人的处理器中。
通过上述实施方式,可以检测所述机器人前方道路,即目标区域的通行能力,可以检测该区域是否存在坑洞、台阶等,以防止所述机器人跌落。
在一个实施方式中,所述3D点云获取装置10为双目摄像头。
在本实施方式中,采用所述双目摄像头可以有效的获取所述目标区域的3D点云数据。所述双目摄像头成本低体积小,有较强的适用性。所述双目摄像头可以是一个也可以是多个,此处不做具体限定。
在一个实施方式中,所述双目摄像头位于距地面高度50cm,所述双目摄像头水平向下的俯视角度为15°,所述双目摄像头的FOV为水平方向90°垂直方向60°。
请参阅图1。在本实施方式中,所述双目摄像头水平向下,且俯视角度为15°,所述双目摄像头的FOV为水平方向90°垂直方向60°。在该场景下,对应检测的所述目标区域的大小、以及所述目标区域和所述机器人的相对位置都恰到好处,可以有效的预防所述机器人跌落。
在一个实施方式中,所述第二处理单元还用于基于各所述像素点的第二空间坐标,确定所述目标区域对应的路况;
在所述目标区域存在相对于地面低于或等于向下台阶高度阈值的区域时,确定该路况为存在向下台阶的路况;
在所述目标区域存在低于地面且高于向下台阶高度阈值的区域时,确定该路况为存在坑洞的路况;
在所述目标区域存在相对于地面高于或等于向上台阶高度阈值的区域时,确定该路况为存在向上台阶的路况。
在本实施方式中,所述第二处理单元还用于确定所述目标区域对应的路况。具体的,各所述像素点的第二空间坐标只能表征所述目标区域各点相对于所述机器人的底盘中心的空间位置,而不能直接表示所述目标的路况。所述第二处理单元在各所述像素点的第二空间坐标基础上,确定所述目标区域对应的路况。在本实施方式中,所述台阶和所述坑洞是基于该区域相对于地面或相对于所述机器人底盘中心的相对高度来进行判断的。例如,在相对高度较大时确定为台阶,在相对高度较小时确定为坑洞。本申请中的台阶和坑洞不局限于现实中的台阶和坑洞。
请参阅图3,在所述目标区域存在相对于地面低于或等于向下台阶高度阈值的区域时,确定该路况为存在向下台阶的路况;其中,所述向下台阶高度阈值可以进行预设,也可以结合实际情况进行调整。例如,在一个场景中,将所述目标区域存在比地面低15cm的区域时,则将该目标区域标记为存在向下台阶的路况。同理,请参阅图4,在所述目标区域存在低于地面且高于向下台阶高度阈值的区域时,确定该路况为存在坑洞的路况;在所述目标区域存在相对于地面高于或等于向上台阶高度阈值的区域时,确定该路况为存在向上台阶的路况。
在本实施方式中,可以基于所述目标区域的各所述像素点的空间坐标,确定所述目标区域的路况。更加直观,且有利于后续评价所述目标区域的通行能力。
在一个实施方式中,所述机器人至少具有以下防跌落能力值之一:针对向下台阶的第一防跌落能力值、针对坑洞的第二防跌落能力值;评价所述第一防跌落能力值至少包括以下维度之一:可跨越台阶深度、可跨越台阶宽度;评价所述第二防跌落能力值至少包括以下维度之一:可跨越坑洞深度、可跨越坑洞宽度、可跨越坑洞长度、可跨越坑洞面积。
在本实施方式中,从所述机器人侧,可以获得该机器人的防跌落能力值,以用于和道路侧的通行能力相对比,以确定该机器人是有具备安全通过所述目标区域的能力。
在本实施方式中,所述机器人的第一防跌落能力值和第二防跌落能力值可以由所述机器人上部结构、底盘结构以及载重等确定,也可以记载于所述机器人的使用说明书中。上述能力值也可以在所述机器人出厂时录入进所述机器人的属性值中。此处不做具体赘述。不同的机器人,跨越坑洞的能力和沿台阶下行的能力也不同。有的机器人不具备沿台阶下行的能力,即所述第一防跌落能力值;有的机器人具备一定的沿台阶下行的能力,例如某些链式传动底盘的机器人等。
在本实施方式中,所述第一防跌落能力值至少包括以下维度之一:可跨越台阶深度、可跨越台阶宽度。例如,请参阅图3,在一个实施场景中,某机器人可以沿台阶深度(台阶高度)15cm,即可跨越台阶深度为15cm,台阶横向宽度(垂直于纸面方向为台阶横向宽度)至少50cm,即可跨越台阶宽度50cm,的台阶下行。
在本实施方式中,所述第二防跌落能力值至少包括以下维度之一:可跨越坑洞深度、可跨越坑洞宽度、可跨越坑洞长度、可跨越坑洞面积。例如,请参阅图4,在一个实施场景中,某机器人可跨越坑洞深度为10cm,可跨越坑洞宽度为8cm,可跨越坑洞长度(垂直于纸面方向为坑洞长度)为30cm,可跨越坑洞面积为240cm
在本实施方式中,通过增加所述机器人侧的防跌落能力值,可以更加精确的判断所述机器人在遇到遇到台阶或者坑洞时是否可以前进。以防止极小的障碍就阻碍了机器人前进。
在一个实施方式中,所述第二处理单元还基于前进方向角来评价所述通行能力的跌落风险;所述前进方向角为所述机器人的前进方向与向下台阶或坑洞的水平垂直方向的夹角。
在本实施方式中,所述前进方向角为所述机器人的前进方向与向下台阶或坑洞的水平垂直方向的夹角。例如,请参阅图5。某一机器人在遇到台阶时,不是正对台阶的,与台阶是成一定夹角的,该夹角就是前进方向角。
上述实施方式,还将所述机器人的行进方向考虑入跌落风险中。机器人在遇到台阶或者坑洞时,与台阶或坑洞的角度也影响所述机器人在目标区域的通行能力。在一个实施场景中,可以设置安全夹角,在所述前进方向角大于该安全夹角时,判定跌落风险增大,更加科学的保护所述机器人。
在一个实施方式中,所述第二处理单元还用于将所述机器人的防跌落能力值与所述目标区域对应的路况的通行能力匹配;在符合通行要求的情况下,所述机器人按原路径行驶;否则,重新规划路径。
在本实施方式中,所述机器人的防跌落能力值与所述目标区域对应的路况的通行能力匹配,可以是指将所述目标区域侧的道路情况的通行能力,与所述机器人侧的防跌落能力相匹配。如果该道路情况在该机器人防跌落能力值范围内,则表示所述机器人可以安全通过该目标区域。当然,在匹配的过程中还可以将所述机器人的前进方向角计算入匹配过程。
在本实施方式中,所述机器人按原路径行驶可以是指所述机器人按导航模块规划的原有路线前进。
在本实施方式中,重新规划路径可以包括:停止所述机器人行进。
或,获取到当前道路的宽度数据;基于当前道路的宽度数据,确定剩余通行道路的宽度数据;在该宽度数据大于等于所述机器人通行的宽度数据的情况下,在当前道路基础上规划绕行路线。
或,在所述剩余通行道路的宽度数据小于所述机器人通行的宽度数据的情况下,重新规划所述机器人路径,该路径绕开当前道路。
或,将所述机器人自动导航模式切换为手动导航模式,以用于用户通过手动控制模块控制所述机器人行进等。
在一个实施方式中,所述第二处理单元还用于在所述机器人的防跌落能力值不符合所述目标区域对应的路况的通行能力的情况下;获取到当前道路的宽度数据;基于当前道路的宽度数据,确定剩余通行道路的宽度数据;在该宽度数据大于等于所述机器人通行的宽度数据的情况下,在当前道路基础上规划绕行路线。
在本实施方式中,获取到当前道路的宽度数据可以是通过地图中存储导航场景2D平面信息来获取。当检测到未完全挡住道路时可以规划出绕行路线,当完全挡住时,把检测到的所述目标区域的路况融合到现有的导航算法中,尝试寻找其他能够到达目的地的道路。
请参阅图6。根据所述目标区域的各所述像素点的第二空间坐标确定前方有一个所述机器人不能跨越的坑洞,所述第二处理单元结合地图中存储导航场景2D平面信息来获取当前道路的宽度数据,得到该道路剩余可供行进的最大宽度数据,当最大宽度数据符合所述机器人的通行要求时,所述机器人通过导航模块绕过该坑洞行进。
当然在另一个实施方式中,所述第二处理单元在检测到所述机器人的防跌落能力值不符合所述目标区域对应的路况的通行能力的情况时,将所述机器人行驶模式切换到手动导航模式,以用于用户通过手动导航控制信号发射器控制所述机器人绕过该坑洞。
在本实施方式中,结合了当前道路的宽度数据,防止所述机器人一遇到障碍就换其他路线或者停止不动,更加合理和智能化。
在一个实施方式中,所述第二处理单元还用于在所述剩余通行道路的宽度数据小于所述机器人通行的宽度数据的情况下,重新规划所述机器人路径,该路径绕开当前道路。
在本实施方式中,计算得到的所述剩余通行道路的宽度数据无法满足所述机器人的安全通行。在该种情况下,所述机器人基于导航模块,重新计算其他路径,绕过当前的道路到达目的地。
本说明书实施方式还提供一种机器人,所述机器人搭载有如上述任意一项所述的防跌落装置;所述机器人还包括:导航模块、报警装置22;所述导航模块用于规划所述机器人的路径;所述报警装置22用于在接收到所述防跌落装置发出的跌落警示信号的情况下,发出用于提示的光信号和声音信号。
在本实施方式中,所述导航模块用于规划所述机器人的路径。具体的,例如,结合地图信息,规划从初始位置到达目的地的路径,以及结合所述防跌落装置提供的所述目标区域对应的路况等信息,重新规划路径等。所述报警装置22可以是警报器等,当所述报警装置22接收到所述第二处理单元发送的所述目标区域存在跌落危险信号时,可以鸣笛等,提醒用户所述机器人的前方存在跌落风险。
在本实施方式中,仅针对与前述实施方式不同之处进行了描述,其它内容可以对照前述实施方式的内容解释,在此不再赘述。
在一个实施方式中,所述机器人还包括:手动控制模块;所述手动控制模块包括:手动导航控制信号发射器和手动导航控制接收器;所述手动导航控制接收器位于所述机器人;所述机器人的控制系统在接收到所述防跌落装置发出的跌落警示信号的情况下,控制所述机器人停止前进;在所述机器人处于手动导航模式的情况下,所述手动导航控制信号发射器用于接收用户的输入信号,并向所述手动导航控制接收器发送控制信号,以控制所述机器人行进。
在本实施方式中,仅针对与前述实施方式不同之处进行了描述,其它内容可以对照前述实施方式的内容解释,在此不再赘述。
本说明书实施方式提供了一种防跌落方法,可以包括以下步骤。
步骤S10:获取目标区域内的3D点云数据,所述3D点云数据用于确定各像素点的第一空间坐标;其中,各所述像素点的第一空间坐标用于表征所述像素点相对于所述3D点云获取装置10的空间位置;所述3D点云获取装置10搭载于机器人的前端;
步骤S12:基于所述3D点云获取装置10与所述机器人的底盘中心的相对位置关系和相对角度关系,将各所述像素点的所述第一空间坐标转化为第二空间坐标;其中,各所述像素点的第二空间坐标用于表征各所述像素点相对于所述机器人的底盘中心的空间位置;
步骤S14:至少基于各所述像素点的第二空间坐标,评价所述目标区域对应的路况的通行能力;其中,评价所述通行能力的维度至少包括跌落风险。
在本实施方式中,所述3D点云获取装置10用于获取目标区域内的3D点云数据。所述3D点云获取装置10可以是一个或多个双目摄像头,也可以是3D的激光雷达。所述目标区域可以是指所述3D点云获取装置10视角区域范围。在一个实施方式中,所述双目摄像头位于距地面高度50cm,所述双目摄像头水平向下的俯视角度为15°,所述双目摄像头的FOV为水平方向90°垂直方向60°。该种布置方式适用性较好,所述机器人可以有效的预防跌落。在本实施方式中,3D点云数据可以是RGBD数据。
在本实施方式中,所述3D点云数据可以与所述3D点云获取装置10的内参相结合,以得到该目标区域相对于所述3D点云获取装置10的第一空间坐标。具体的,例如,所述3D点云获取装置10为一个双目摄像头,该双目摄像头相机的位置为第一空间坐标系的原点坐标,以该双目摄像头的角度,确定该坐标系的基准轴。该目标区域内的3D点云数据,结合原点坐标和基准轴,得到该目标区域内每个像素点的(x,y,z)坐标。在本实施方式中,每个像素点可以对应于所述目标区域内的每个点。
在本实施方式中,将所述目标区域内的像素点相对于所述3D点云获取装置10的所述第一空间坐标转化为相对于所述机器人的底盘中心的第二空间坐标。具体的,例如,在第一空间坐标系中是所述3D点云获取装置10正方向为Z轴的空间坐标。而在第二空间坐标系中,是以所述机器人的底盘中心前进方向的垂直方向为所述第二空间坐标系的Z轴。再结合所述3D点云获取装置10与所述机器人的底盘中心的相对位置,获得所述目标区域内每个像素点相对于所述机器人的底盘中心的空间坐标,以更加直观的来分析跌落风险等。
在本实施方式中,可以基于各所述像素点的第二空间坐标,计算获得凹陷区域的面积、长度、深度、宽度等,也可以计算获得凸起区域的形状、大小、高度等,可以供所述机器人的处理器进一步判断该目标区域的路况。
在本实施方式中,所述通行能力可以用于表征所述目标区域对应路况供机器人平稳通行的能力。所述通行能力可以包括多个维度,例如,路面平整度的维度、路面障碍物大小、多少和高度的维度,以及对应跌落风险的维度等。所述跌落风险的维度可以是指在所述机器人在通行该区域时,因道路侧原因造成所述机器人跌落的风险值。例如,该区域上存在深坑和向下台阶等,深坑越深越大,无疑对应的跌落风险越大。在一个场景示例中,基于所述目标区域各所述像素点的第二空间坐标,得到该区域路面平整度的整体评分80分;存在一个向上的5公分的凸起,在路面障碍物评分为60分;存在一个长1米、宽0.1米、深度0.2米的深坑,在跌落风险的评分为10分。基于上述评分,通过加权等方式可以得到该目标区域的整体评分以表征该区域的通行能力。当然,每个维度也可以是A、B、C、D等进行评级,此处不做具体赘述。
当然,在一个实施方式中,也可以设定只要所述目标区域的像素点中,存在小于等于预设个数的像素点的第二空间坐标的高度值超过或低于高度阈值时,则认为所述目标区域对应的路况的通行能力不满足所述机器人。
在本实施方式中,至少基于各所述像素点的第二空间坐标,评价所述目标区域对应的路况的通行能力;其中,评价所述通行能力的维度至少包括跌落风险。具体的,评价所述通行能力时,包括跌落风险的维度。
通过上述实施方式,可以检测所述机器人前方道路,即目标区域的通行能力,可以检测该区域是否存在坑洞、台阶等,以防止所述机器人跌落。
在一个实施方式中,所述3D点云获取装置10为双目摄像头;所述双目摄像头位于距地面高度50cm,所述双目摄像头水平向下的俯视角度为15°,所述双目摄像头的FOV为水平方向90°垂直方向60°
在本实施方式中,采用所述双目摄像头可以有效的获取所述目标区域的3D点云数据。所述双目摄像头成本低体积小,有较强的适用性。请参阅图1。在本实施方式中,所述双目摄像头水平向下,且俯视角度为15°,所述双目摄像头的FOV为水平方向90°垂直方向60°。在该场景下,对应检测的所述目标区域的大小、以及所述目标区域和所述机器人的相对位置都恰到好处,可以有效的预防所述机器人跌落。
在一个实施方式中,在评价所述目标区域对应的路况的通行能力的步骤中还可以包括以下步骤。
基于各所述像素点的第二空间坐标,确定所述目标区域对应的路况;
在所述目标区域存在相对于地面低于或等于向下台阶高度阈值的区域时,确定该路况为存在向下台阶的路况;
在所述目标区域存在低于地面且高于向下台阶高度阈值的区域时,确定该路况为存在坑洞的路况;
在所述目标区域存在相对于地面高于或等于向上台阶高度阈值的区域时,确定该路况为存在向上台阶的路况。
在本实施方式中,在各所述像素点的第二空间坐标基础上,确定所述目标区域对应的路况。各所述像素点的第二空间坐标只能表征所述目标区域各点相对于所述机器人的底盘中心的空间位置,而不能直接表示所述目标的路况。所述台阶和所述坑洞是基于该区域相对于地面或相对于所述机器人底盘中心的相对高度来进行判断的。例如,在相对高度较大时确定为台阶,在相对高度较小时确定为坑洞。本申请中的台阶和坑洞不局限于现实中的台阶和坑洞。
请参阅图3,在所述目标区域存在相对于地面低于或等于向下台阶高度阈值的区域时,确定该路况为存在向下台阶的路况;其中,所述向下台阶高度阈值可以进行预设,也可以结合实际情况进行调整。例如,在一个场景中,将所述目标区域存在比地面低15cm的区域时,则将该目标区域标记为存在向下台阶的路况。同理,请参阅图4,在所述目标区域存在低于地面且高于向下台阶高度阈值的区域时,确定该路况为存在坑洞的路况;在所述目标区域存在相对于地面高于或等于向上台阶高度阈值的区域时,确定该路况为存在向上台阶的路况。
在本实施方式中,可以基于所述目标区域的各所述像素点的空间坐标,确定所述目标区域的路况。更加直观,且有利于后续评价所述目标区域的通行能力。
在一个实施方式中,所述方法还包括:获取所述机器人的防跌落能力值;所述防跌落能力值至少包括以下之一:针对向下台阶的第一防跌落能力值、针对坑洞的第二防跌落能力值;评价所述第一防跌落能力值至少包括以下维度之一:可跨越台阶深度、可跨越台阶宽度;评价所述第二防跌落能力值至少包括以下维度之一:可跨越坑洞深度、可跨越坑洞宽度、可跨越坑洞长度、可跨越坑洞面积。
在本实施方式中,从所述机器人侧,可以获得该机器人的防跌落能力值,以用于和道路侧的通行能力相对比,以确定该机器人是有具备安全通过所述目标区域的能力。
在本实施方式中,所述机器人的第一防跌落能力值和第二防跌落能力值可以由所述机器人上部结构、底盘结构以及载重等确定,也可以记载于所述机器人的使用说明书中。上述能力值也可以在所述机器人出厂时录入进所述机器人的属性值中。此处不做具体赘述。不同的机器人,跨越坑洞的能力和沿台阶下行的能力也不同。有的机器人不具备沿台阶下行的能力,即所述第一防跌落能力值;有的机器人具备一定的沿台阶下行的能力,例如某些链式传动底盘的机器人等。
在本实施方式中,所述第一防跌落能力值至少包括以下维度之一:可跨越台阶深度、可跨越台阶宽度。例如,请参阅图3,在一个实施场景中,某机器人可以沿台阶深度(台阶高度)15cm,即可跨越台阶深度为15cm,台阶横向宽度(垂直于纸面方向为台阶横向宽度)至少50cm,即可跨越台阶宽度50cm,的台阶下行。
在本实施方式中,所述第二防跌落能力值至少包括以下维度之一:可跨越坑洞深度、可跨越坑洞宽度、可跨越坑洞长度、可跨越坑洞面积。例如,请参阅图4,在一个实施场景中,某机器人可跨越坑洞深度为10cm,可跨越坑洞宽度为8cm,可跨越坑洞长度(垂直于纸面方向为坑洞长度)为30cm,可跨越坑洞面积为240cm
在本实施方式中,通过增加所述机器人侧的防跌落能力值,可以更加精确的判断所述机器人在遇到遇到台阶或者坑洞时是否可以前进。以防止极小的障碍就阻碍了机器人前进。
在一个实施方式中,在评价所述目标区域对应的路况的通行能力的步骤中还包括:基于前进方向角,评价所述通行能力的跌落风险;所述前进方向角为所述机器人的前进方向与向下台阶或坑洞的水平垂直方向的夹角。
在本实施方式中,所述前进方向角为所述机器人的前进方向与向下台阶或坑洞的水平垂直方向的夹角。例如,请参阅图5。某一机器人在遇到台阶时,不是正对台阶的,与台阶是成一定夹角的,该夹角就是前进方向角。
上述实施方式,还将所述机器人的行进方向考虑入跌落风险中。机器人在遇到台阶或者坑洞时,与台阶或坑洞的角度也影响所述机器人在目标区域的通行能力。在一个实施场景中,可以设置安全夹角,在所述前进方向角大于该安全夹角时,判定跌落风险增大,更加科学的保护所述机器人。
在一个实施方式中,所述方法还包括:将所述机器人的防跌落能力值与所述目标区域对应的路况的通行能力匹配;在符合通行要求的情况下,所述机器人按原路径行驶。
在本实施方式中,所述机器人的防跌落能力值与所述目标区域对应的路况的通行能力匹配,可以是指将所述目标区域侧的道路情况的通行能力,与所述机器人侧的防跌落能力相匹配。如果该道路情况在该机器人防跌落能力值范围内,则表示所述机器人可以安全通过该目标区域。当然,在匹配的过程中还可以将所述机器人的前进方向角计算入匹配过程。在本实施方式中,所述机器人按原路径行驶可以是指所述机器人按导航模块规划的原有路线前进。
上述实施方式,在所述机器人的防跌落能力可以抵抗所述目标区域道路对应的路况的跌落风险时,可以按照原路径行驶。
在一个实施方式中,所述方法还包括:在所述机器人的防跌落能力值不符合所述目标区域对应的路况的通行能力的情况下;基于导航场景的平面信息,重新规划路径;或,向所述机器人的控制系统发送跌落警示信号,以用于所述机器人的控制系统控制所述机器人停止前进;或,将所述机器人自动导航模式切换为手动导航模式,以用于用户通过手动控制模块控制所述机器人行进。
在本实施方式中,所述机器人的防跌落能力不足以抵抗所述目标区域道路对应的路况的跌落风险。提供了多种策略,以防止所述机器人跌落。请参阅图6,在一种实施场景中,在所述机器人无法越过坑洞时,所述机器人可以将自动导航模式切换为手动导航模式,用户可以通过控制器,即所述手动导航控制信号发射器来控制所述机器人绕过该坑洞。
在一个实施方式中,在基于导航场景的平面信息,重新规划路径的步骤中可以包括以下步骤。
步骤S20:获取到当前道路的宽度数据。
步骤S22:基于当前道路的宽度数据,确定剩余通行道路的宽度数据。
步骤S24:在该宽度数据大于等于所述机器人通行的宽度数据的情况下,在当前道路基础上规划绕行路线。
在本实施方式中,获取到当前道路的宽度数据可以是通过地图中存储导航场景2D平面信息来获取。当检测到未完全挡住道路时可以规划出绕行路线,当完全挡住时,把检测到的所述目标区域的路况融合到现有的导航算法中,尝试寻找其他能够到达目的地的道路。
请参阅图6。根据所述目标区域的各所述像素点的第二空间坐标确定前方有一个所述机器人不能跨越的坑洞,所述第二处理单元结合地图中存储导航场景2D平面信息来获取当前道路的宽度数据,得到该道路剩余可供行进的最大宽度数据,当最大宽度数据符合所述机器人的通行要求时,所述机器人通过导航模块绕过该坑洞行进。
当然在另一个实施方式中,所述第二处理单元在检测到所述机器人的防跌落能力值不符合所述目标区域对应的路况的通行能力的情况时,将所述机器人行驶模式切换到手动导航模式,以用于用户通过手动导航控制信号发射器控制所述机器人绕过该坑洞。
在本实施方式中,结合了当前道路的宽度数据,防止所述机器人一遇到障碍就换其他路线或者停止不动,更加合理和智能化。
在一个实施方式中,在所述剩余通行道路的宽度数据小于所述机器人通行的宽度数据的情况下,重新规划所述机器人路径,该路径绕开当前道路。
在本实施方式中,计算得到的所述剩余通行道路的宽度数据无法满足所述机器人的安全通行。在该种情况下,所述机器人基于导航模块,重新计算其他路径,绕过当前的道路到达目的地。
需要说明的是,在本申请的描述中,术语“第一”、“第二”等仅用于描述目的和区别类似的对象,两者之间并不存在先后顺序,也不能理解为指示或暗示相对重要性。此外,在本申请的描述中,除非另有说明,“多个”的含义是两个或两个以上。
应该理解,以上描述是为了进行图示说明而不是为了进行限制。通过阅读上述描述,在所提供的示例之外的许多实施方式和许多应用对本领域技术人员来说都将是显而易见的。因此,本教导的范围不应该参照上述描述来确定,而是应该参照前述权利要求以及这些权利要求所拥有的等价物的全部范围来确定。出于全面之目的,所有文章和参考包括专利申请和公告的公开都通过参考结合在本文中。在前述权利要求中省略这里公开的主题的任何方面并不是为了放弃该主体内容,也不应该认为申请人没有将该主题考虑为所公开的申请主题的一部分。
- 防跌落装置、机器人和防跌落方法
- 一种防跌落机器人的行走方法、系统及防跌落机器人