灌装装置
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及灌装设备技术领域,特别是涉及一种灌装装置。
背景技术
在现有的灌装设备中,经常是一个灌装嘴对应一个活塞缸,活塞缸中的活塞杆往前推进行注射动作,活塞杆往后退进行吸料动作,该过程需要先吸料后才能注射,即在吸料过程中,设备并没有进行注射动作,整个设备处于等待阶段,其效率低下。若需提高生产速度,则通常设置同时多组灌装设备,一个驱动电机对应一个活塞缸,或者减少吸料动作的时间,使得吸料动作所占用的比例较低,这两种解决方法都会导致动力消耗大,生产成本投入较高。
因此,急需一种灌装装置,用于解决现有灌装设备效率低下以及成本较高的问题。
发明内容
本发明提供了一种灌装装置,用于解决现有灌装设备效率低下以及成本较高的问题。
为了解决上述技术问题,本发明提供一种灌装装置,包括基座、注射机构、第一连接器、第二连接器和控制系统;注射机构设于基座上,注射机构包括驱动组件、驱动组件驱动的双头活塞杆和与双头活塞杆位于同一直线上的第一活塞缸、第二活塞缸,双头活塞杆的第一端在第一活塞缸内移动、第二端在第二活塞缸内移动;第一活塞缸连接第一连接器,第二活塞缸连接第二连接器,第一连接器设有第一出料口和第一吸料口,第二连接器设有第二出料口和第二吸料口;驱动组件、第一连接器和第二连接器均与控制系统电连接。
优选地,驱动组件包括与控制系统电连接的电机和与电机电连接的推块,推块与双头活塞杆固定连接,电机驱动推块移动。
优选地,基座上开设有容纳推块的凹槽,电机驱动推块在凹槽内移动。
优选地,第一连接器和第二连接器均为三通阀。
实施本发明的一种灌装装置,与现有技术相比,其有益效果在于:
双头活塞杆的两端都穿设有活塞缸,可以实现一个驱动电机带动两个活塞缸进行注射动作或吸料动作,节省了动力消耗。具体地,由于双头活塞杆的第一端在第一活塞缸内移动、第二端在第二活塞缸内移动,且双头活塞杆和第一活塞缸、第二活塞缸位于同一直线上,因此利用驱动组件驱动双头活塞杆的来回移动可以实现:当双头活塞杆向靠近第一连接器的方向移动时,第一活塞缸进行注射动作,第二活塞缸实现吸料动作;当双头活塞杆向远离第一连接器的方向移动时,第一活塞缸进行吸料动作,第二活塞缸实现注射动作。具体地,当第一连接器实现注射动作时,第一出料口和第一活塞缸导通,当第一连接器实现吸料动作时,第一吸料口和第一活塞缸导通;当第二连接器实现注射动作时,第二出料口和第二活塞缸导通,当第二连接器实现吸料动作时,第二吸料口和第二活塞缸导通,大大节省了时间、提高了效率,即在每个运动周期内都有注射动作发生,相较于现有技术的灌装装置,效率可以提高1倍,节省了动力。
附图说明
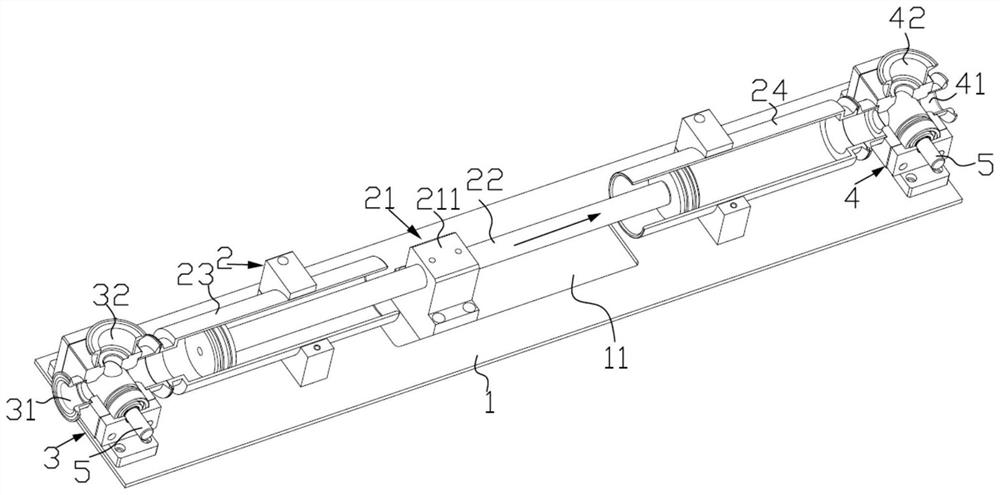
图1是本发明实施例中的第一结构示意图;
图2是本发明实施例中的第二结构示意图。
图中,1、基座,11、凹槽,2、注射机构,21、驱动组件,211、推块,22、双头活塞杆,23、第一活塞缸,24、第二活塞缸,3、第一连接器,31、第一出料口,32、第一吸料口,4、第二连接器,41、第二出料口,42、第二吸料口,5、阀芯。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,应当理解的是,本发明中采用术语“第一”、“第二”等来描述各种信息,但这些信息不应限于这些术语,这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本发明范围的情况下,“第一”信息也可以被称为“第二”信息,类似的,“第二”信息也可以被称为“第一”信息。
结合图2所示,本发明实施例提供了一种灌装装置,包括基座1、注射机构2、第一连接器3、第二连接器4和控制系统(图中未示出,且该控制系统为现有技术,为伺服控制系统);注射机构2设于基座1上,注射机构2包括驱动组件21、驱动组件21驱动的双头活塞杆22和与双头活塞杆22位于同一直线上的第一活塞缸23、第二活塞缸24,双头活塞杆22的第一端在第一活塞缸23内移动、第二端在第二活塞缸24内移动;第一活塞缸23连接第一连接器3,第二活塞缸24连接第二连接器4,第一连接器3设有第一出料口31和第一吸料口32,第二连接器4设有第二出料口41和第二吸料口42;驱动组件21、第一连接器3和第二连接器4均与控制系统电连接。
基于以上技术方案,本发明实施例提供的一种灌装装置,由于双头活塞杆22的第一端在第一活塞缸23内移动、第二端在第二活塞缸24内移动,且双头活塞杆22和第一活塞缸23、第二活塞缸24位于同一直线上,因此利用驱动组件21驱动双头活塞杆22的来回移动可以实现:当双头活塞杆22向靠近第一连接器3的方向移动时,第一活塞缸23进行注射动作,第二活塞缸24实现吸料动作;当双头活塞杆22向远离第一连接器3的方向移动时,第一活塞缸23进行吸料动作,第二活塞缸24实现注射动作。具体地,当第一连接器3实现注射动作时,第一出料口31和第一活塞缸23导通,当第一连接器3实现吸料动作时,第一吸料口32和第一活塞缸23导通;当第二连接器4实现注射动作时,第二出料口41和第二活塞缸24导通,当第二连接器4实现吸料动作时,第二吸料口42和第二活塞缸24导通,大大节省了时间、提高了效率,即在每个运动周期内都有注射动作发生,相较于现有技术的灌装装置,效率可以提高1倍。
其中,第一出料口31和第二出料口41与待灌装的容器相连接,第一吸料口32和第二吸料口42与物料槽连通,用于接收已经搅拌均匀且为流动状态的物料。
驱动组件21驱动双头活塞杆22移动的方式有多种,例如可通过电机带动滚珠丝杆转动从而移动双头活塞杆22,或者使用电缸直接带动双头活塞杆22的移动,以及利用齿轮齿条带动双头活塞杆22的移动。本实施例优选地,驱动组件21包括与控制系统电连接的电机(图中未示出)和被电机驱动的推块211,推块211与双头活塞杆22连接,电机驱动推块211移动,因此可以通过电机驱动推块211的移动,间接地使双头活塞杆22在第一活塞缸23和第二活塞缸24内移动,实现注射动作和吸料动作。可以理解的是,电机可以为伺服电机、步进电机或者其他电机;推块211与双头活塞杆22的连接可为销轴式的活动连接,也可以是浮动接头连接,亦或是简单的螺钉固定连接。
优选地,基座1上开设有容纳推块211的凹槽11,电机驱动推块211在凹槽11内移动。通过设置凹槽11,可以对推块211的移动起到导向作用,可以保证双头活塞杆22的运动方向能够与第一活塞缸23和第二活塞缸24保持在同一直线上。
优选地,第一连接器3和第二连接器4均为三通阀,其具体工作过程是:控制系统通过电连接控制电磁阀(图中未示出)动作,使得电磁阀控制气缸(图中未示出)动作,最后气缸去控制三通阀上阀芯5切换转动角度,具体地:三通阀的阀芯5的侧面上开设有多个连通的孔位,因此只需要通过控制阀芯5的转动角度,就可以实现第一吸料口32与第一活塞缸23的连通,或者是第一出料口31与第一活塞缸23的连通,第二连接器4同理。可以理解的是,驱动阀芯5的转动方式可以有多种,例如使用电机直接驱动阀芯5转动,但是该方式较不经济,浪费较多能源。
综上,本发明实施例的工作过程为:
1、如图1所示,此时双头活塞杆22的第一端位于第一活塞缸23的最右端、第二端位于第二活塞缸24的最右端;在这一瞬间,第一吸料口32还与第一活塞缸23连通,第二出料口41还与第二活塞缸24连通。
2、当控制系统开始动作时(双头活塞杆22向靠近第一连接器3的位置移动),以上连通关系切换为:第一出料口31与第一活塞缸23连通,第二吸料口42与第二活塞缸24连通,第一活塞缸23进行注射动作,第二活塞缸24进行吸料动作。
3、如图2所示,当双头活塞杆22的第一端到达第一活塞缸23的行程尽头时,第一活塞缸23的注射动作完成,第二活塞缸24的吸料动作也完成,在回程动作开始后,连通关系切换为:第一吸料口32与第一活塞缸23连通,第二出料口41与第二活塞缸24连通,并且双头活塞杆22向靠近第二连接器4的方向移动,第一活塞缸23进行吸料动作,第二活塞缸24进行注射动作。
4、如此往复,双头活塞杆22的每次移动都有注射动作的存在,大大提高了工作效率。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。
- 用于清洁和消毒将灌装产品灌装到容器中的饮料灌装设备的灌装阀的装置
- 伺服齿轮式定量灌装装置及伺服齿轮式定量灌装装置全自动灌装机